自動運転が実用化段階を迎えつつある。しかし,特に完全自動運転を実用化するに当たっては,さまざまな法制度上の課題に対応しなければならない。自動運転技術は事故を減らすだろうが,ゼロにすることは絶対にないから,事故が起きたときの法的責任の所在も論じられなければならない。本稿では,自動運転技術が直面することになる法制度上の課題を概観するとともに,対応策の方向性について,提案を行う。
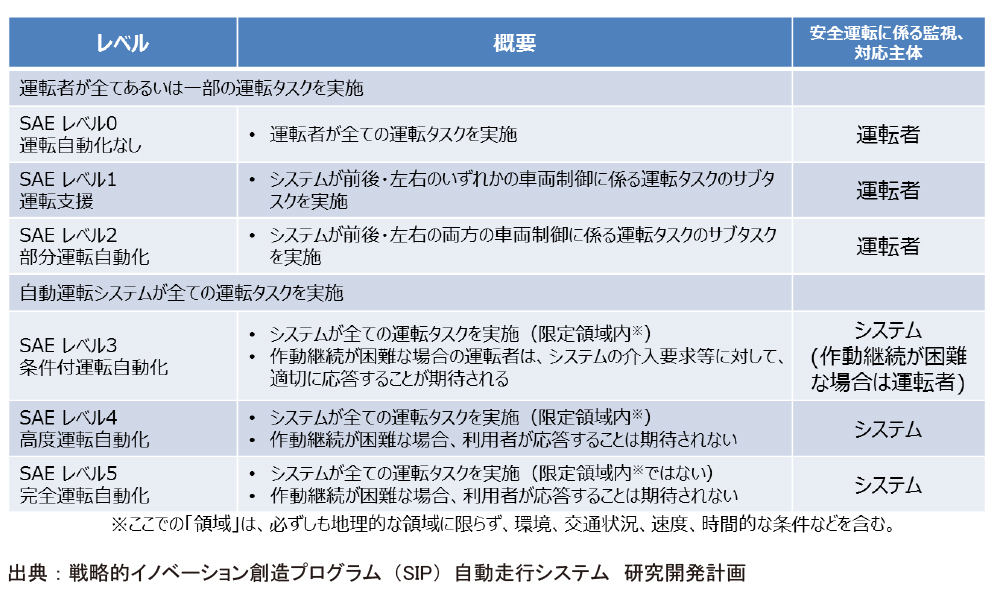
自動運転は,人間の運転を支援するレベルから,人の手を一切要しない完全自動運転のレベルまでさまざまな段階があり,レベルによって,技術的・法的課題は異なる。レベルの定義について,本稿は内閣府「戦略的イノベーション創造プログラム自動走行システム研究開発計画」(2017年)での定義1)(表1)に従う。なお本稿では,レベル4以上の自動運転車を「完全自動運転車」ということがある。ただし,いずれのレベルにおいても,ドライバーはいつでもシステムの制御に介入できる。
自動車は,人々の生活や経済の発展に大きく貢献した,人類最大の発明であると同時に,わが国のみですら毎年数千人の生命を奪う,本質的に危険な工業製品でもある。1949年,国連は,ジュネーブにおいて,国際道路交通の発達および安全の促進を目的とする「道路交通に関する条約」(ジュネーブ交通条約)を採択した。わが国は1964年に同条約に加入したから,道路交通に関する法制度は,ジュネーブ交通条約に従う必要がある。
2014年3月,ジュネーブ交通条約は,自動運転技術の進展を受け,人が即座に運転に関与できる,もしくは自動運転を停止できることを条件に,「レベル2」までの自動運転を認めた。
2014年,国連欧州経済委員会の下に「自動運転分科会」が創設され,日本と英国が議長国に選ばれた。2015年2月には「自動操舵(そうだ)専門家会議」が創設され,日本とドイツが共同議長国となった2)~5)。
今後,ジュネーブ交通条約加盟国において,レベル3以上の自動運転が実用化されるためには,ジュネーブ交通条約の改正と,これを受けた国内法規の改正が必要になる。いいかえれば,自国の自動車産業に有利な条件でジュネーブ交通条約を改正するためのせめぎ合いが,すでに始まっているともいえる6)。
2.2 国内の動向2014年6月,内閣府は「自動走行システム推進委員会」注1)を設置した。同年10月には「自動走行システム研究開発計画」が策定され,関係各省庁との連携が明記された7),8)。
これを受け,国土交通省と経済産業省は2015年2月に「自動走行ビジネス研究会」注2)を立ち上げた。また,総務省は「通信ネットワークの高精度化」や「高信頼化技術」「高度地図データベース」等の研究開発や実証実験を行っている9)。警察庁は2015年10月に「自動走行の制度的課題等に関する調査検討委員会」を設置し,その後,「自動運転の段階的実現に向けた調査検討委員会」注3)に改組した。
各省庁の取り組みをみると,多少の温度差があることは否めない。特に警察庁は,「制度的課題」や「段階的実現」という委員会名から明らかなとおり,自動運転の実現に最も慎重である。
たとえば,「自動運転の段階的実現に向けた調査検討委員会」の議事録には,「(自動車が法定)最高速度を超えて円滑に走行しているという状況はあってはならない」ので,「自動運転車は法定速度を遵守(じゅんしゅ)することが前提であり,実勢速度に合わせるべきかといった議論をする必要はない」との発言がみられる10)。しかし現実には,一時的な制限速度超過を容認しなければ,高速道路への安全な流入は不可能と指摘されている11)。
3.1 道路交通法上の問題もっとも,警察庁の慎重姿勢は,道路交通の安全を預かる立場としては当然ともいえる。実際のところ,自動運転車にすべての交通法規を順守させつつ,周囲の状況に柔軟に対応して円滑な交通を維持させるのは容易なことではない12)。
たとえば走行中,前方の信号機が黄色に変わったとき,直ちに停止するか交差点に進入するかの判断や,停止中,前方の大型車に遮られて信号機が見えないとき,「緑」に変わったとの判断を画像センシングでのみ行うのか注4),それとも周囲の状況から合理的に推定してよいのかなど,人間なら柔軟に対応する場面で,自動運転車はどうすべきかが問われることになる注5)。いいかえれば,四角四面な振る舞いではなく,周囲の人間に波長を合わせた「いい加減なAI」の開発と実装が求められている。
さらに,道路交通法7条は,「警察官等の手信号等」を順守する義務を定めている。しかし,自動運転車に手信号の意味を理解させることは,現在の技術水準では困難であろう。加えて,「緑のおばさん」や道路工事従事者,駐車場係員等による手信号も理解させる必要がある。一つの解決策としては,手信号に代わり,自動運転車に指示を与える「リモコン」を所持させることも考えられるが,その装置や技術が悪用されるリスクもある。これらの課題については,技術的解決とともに,適切な法改正を検討していく必要がある。
3.2 コンピューターは運転手か2016年2月12日の日本経済新聞は,米国NHTSA(米国運輸省道路交通安全局)がGoogle社に対して,十分な情報と根拠を提供することを前提に,自動運転用ソフトウェアを「運転手」と見なせる可能性があるとの見解を示したと報じた13)。
この報道に対して,「コンピューターに人格を認めたもの」であるとか,「メーカーの責任を軽減したもの」であるとの意見もみられるが,誤解である。NHTSAの見解は,自動運転車のコンピューターが,人間の運転手並みかそれ以上の運転技術を有するのであれば,道路走行に限定する限りにおいて,コンピューターと人間とを区別する必要はない,という実利的な解釈を示したものではあるが,自動運転車が事故を起こした場合の責任について言及したものではなく,まして,メーカーの賠償責任を軽減させたものではない。
この問題をわが国の法令に当てはめると,道路交通法上の「運転者」に自動運転車のコンピューターを含めることができるか,という問題になる。法解釈としては,交通事故時の救護義務をはじめ,コンピューターには履行できない義務が「運転者の義務」として定められていることからして,「運転者」にコンピューターを含めることは,難しいだろう。
3.3 自動運転車の運転免許制度以上述べたところから明らかなとおり,レベル3以上の自動運転車に対しては,結果的に事故を回避し,安全に運転するだけではなく,道路交通法規を順守するとともに,人間が運転する自動車と混在する環境下で,周辺を混乱させず,円滑な交通を維持する能力が求められる。今後,国内外のさまざまなメーカーが自動運転車を製造販売することになれば,自動運転システムの信頼性が問われることになるから,それらの性能や安全性を保証する制度が必要となる。
したがって,自動運転車が道路交通法規を順守し,安全に運行する能力については,国際法および国内法によって一定の基準が定められることとなろう。そして,自動運転システムがその基準を満たさない限り,公道走行は許されないことになろう。
これは筆者の予想であるが,自動運転システムが法定基準を満たすか否かについては,公的機関が認証するための試験が実施されることになる。いわば自動運転車の運転免許制度である。「運転免許試験」は,実環境下で自動運転走行させる「実技試験」に加えて,自動車のコンピューターと「試験官」役の外部コンピューターを接続し,仮想空間内にさまざまな場面をつくりだして行うシミュレーションとによって行われることになろう。
さらに想像をたくましくすれば,自動運転システムは,第一種普通免許を付与される人間の平均的運転技術レベルを最低として,その上に何段階にもわたるクラス(最高はF1ドライバークラス)が設定されることになろう。そして,先進国の自動車メーカーや高級車メーカーは,搭載する自動運転システムのランキングを競うことによって,国際競争力を高めようとするだろう。
人間が運転する自動車では,事故の9割が人為ミスによるともいわれている。そうだとすれば,自動運転車が実用化すれば,事故数は劇的に減少することになる。しかし,自動運転車による事故数がゼロになることはありえない。では,完全自動運転車による人身事故が起きた場合,メーカーの社長や担当者が刑事責任を問われる可能性はあるのだろうか14)。
もとより,いわゆる不可抗力による事故の場合,すなわち,人間の優秀な運転手ですら予見もしくは回避できない事故について,自動運転車メーカーの社長や設計担当者が刑事責任を問われることはない。問題は,人間の運転手であれば刑事責任を問われたであろう事故を,自動運転車が起こした場合である。
この場合,メーカーは刑事責任を免れないとの見解もありうるだろう。しかし,刑事責任を問われるリスクは,自動車メーカーに対して強い萎縮効果を与えるから,自動運転車の実用化を困難にするだろう。自動運転が実用化すれば,事故が減るにもかかわらず,メーカーが責任を恐れるあまり,実用化が遅れるのでは,本末転倒である。したがって,制度論としては,自動運転システムが上述した法定基準を満たす(=運転免許試験に合格した)限り,自動車メーカーの社長や担当者が事故の刑事責任を問われることは,原則としてない,と考えざるをえない。例外として,自動運転システムに不具合が発見されたにもかかわらず,メーカーが合理的な期間内に適切な対応を取らなかった場合には,期間経過後に発生した事故について,メーカーの担当者等が刑事責任を問われる場合はありうるだろう。
4.2 トロッコ問題 4.2.1 トロッコ問題とはところで,自動運転を巡る法律問題を論じるとき,法律家や哲学者が好んで言及する話題に「トロッコ問題」がある。
「トロッコ問題」とは,「制御不能で暴走するトロッコは,このままでは前方にいる5人の作業員をひいてしまう。転轍機(てんてつき)を操作してトロッコを別路線に引き入れれば,5人の作業員は助かるが,別路線で作業する1人の作業員をひいてしまう。この場合,転轍機を操作するべきか?」という倫理学の思考実験である。これを自動運転車に応用すると,たとえば,「1台の自動運転車が,海沿いの崖の上の道路を走行していたところ,対向するトラックが突然反対車線に飛び出してきた。このまま直進すれば,トラックに衝突して自動車の乗員が死亡し,トラックの乗員が負傷する。左にハンドルを切れば,海に落ちて自動車の乗員が死亡する。右にハンドルを切れば,乗員は助かるが,歩行者をひいて死亡させる。この場合,自動運転車は,いかなる選択をなすべきか。乗員が85歳の老人である場合,あるいは歩行者が乳児を抱いた母親である場合に結論が異なるか?」という問題となる(図1)。

法律学の見地からみると,「トロッコ問題」は,「緊急避難の成否」の問題である。すなわち,どの方向を選んでも人の死という結果が生じることがわかっているのであれば,どの行為も故意による殺人罪の外観を満たす(この点が,過失犯である通常の自動車事故と異なる)。しかし,緊急事態を避けるためやむをえぬ行為であれば,これによって生じた害が避けようとした害の程度を超えなかった場合に限り,緊急避難が成立し,罪に問われない(刑法37条1項)。では,上記の事例で,緊急避難が成立するのは,どの場合か,という問題である。
これは,自動運転車の場合,プログラマーの刑事責任の問題となる。すなわち,上記の事例で母子をひくようプログラムした者は,殺人罪に問われるか,という問題である。あるいは,上記の事例で,適切な判断を人工知能に委ねる選択をしたプログラマーは,その選択の結果について,刑事責任を問われるか,という問題である。
4.2.3 自動運転とトロッコ問題自動運転車のトロッコ問題については,内外の法学者や哲学者が,さまざまな論考を発表している注6)。しかし筆者は,自動運転の「トロッコ問題」において最も重要なのは,危機的状況において自動運転車の従うべき優先順位が,国際法によって統一されて定められることと考える。なぜなら,危機的状況における自動運転車の振る舞いが,メーカーや車種によってバラバラでは,その場に居合わせた人間が,危険を回避できなくなるからである。
そして,自動運転車が危機的状況において,法の定めた優先順位に従って振る舞う限り,メーカーが法的責任を問われることはないように,国内法が整備されなければならない。
4.2.4 危機的状況における優先順位それでは,危機的状況において,自動運転車が順守するべき優先順位は,どのようなものになるであろうか。筆者は,次のようになると予測する。
上記の優先順位に従えば,「4.2.1 トロッコ問題とは」の項で述べた設例において,自動運転車は,乗員がいる場合は,右にハンドルを切って歩行者をひくことを選択するべきことになる。この結論は,乗員が85歳の老人であり,歩行者が乳児を抱いた母親であるとしても,変わらない注7)。他方,乗員がいない場合には,自動運転車は左にハンドルを切って,海に転落すべきことになる。
2016年5月7日午後4時40分,フロリダ州を東西に走る高速道路で,テスラモーターズ社製電気自動車「モデルS」がオートパイロットモードで走行中,対向車線から左折した大型トレーラーの荷台の下に潜り込む形で衝突し,モデルSの運転席の男性が死亡した。
この事故を調査していた米国NHTSAは,2017年1月19日,事故原因は死亡した運転手の前方不注視にあるとし,テスラ車のシステムに欠陥は確認されなかったと報告15)して調査を打ち切った。
しかし,この報告書は,テスラ車が現行米法上の基準に違反していないことを認定しただけであり,自動運転技術の信頼性を保証したものではない。むしろ,重要な課題を指摘したといえる。それは,「自動運転車は,人間が起こさない事故を起こす」という点である。
事故は晴れた日の午後4時40分に,見通しのよい直線道路で起きた(図2)。報告書によれば,運転手は「少なくとも7秒前」にはトレーラーを視認できたという。すなわち,運転手が前方を注視していれば,事故は起こりえなかった。言いかえれば,人間が回避できた事故を,テスラ車は回避できなかったことになる。
自動運転車の普及は,交通事故の発生率を劇的に減少させるといわれている注8)。その変化が,「人間であれば起こす事故」を減少させるだけ(図3)であるならば問題はない。しかし他方で,「人間であれば回避できた事故」を自動運転車が起こしてしまう(図4)のであれば,たとえその確率が低いとしても,社会に警戒感を惹起(じゃっき)し,自動運転車の普及を妨げることになろう。
事故を起こしたテスラ車は,前方監視のため,光学式カメラとミリ波レーダー装置を装備していた。カメラが働かなかった理由について,テスラ社は,「強い日差しがトレーラーの白い荷台に反射した」ことが原因と述べた16)。しかし,5月の午後4時40分の西日程度で,前方のトラックが視認できなくなったとすれば,安全上重大な問題である。また,仮にシステムの「目がくらんだ」状態になったとすれば,直ちに徐行または停止すべきであるから,そのまま走行したことは,完全自動運転を任せられるレベルではないことを意味している。
また,人間であれば,荷台そのものを視認できなくても,その両端にあるタイヤが視認できれば,そこに荷台があると推定できるし,牽引(けんいん)車の後部には,通常荷台が接続されていることも,経験的に知っている。つまり,テスラ車は,タイヤや牽引車という「見える部分」から,荷台という「見えない部分」を推定する能力を有していなかったといえる。
次に,ミリ波レーダー装置が事故を回避できなかった理由について,テスラ社は,「荷台を(道路をまたぐ)標識と誤認した可能性がある」と述べたという。しかし,人間ならば,「移動する道路標識」が存在しないことを承知しているから,「道路標識が前方道路上を移動している」と認識しつつ,「その下をくぐって行ける」と判断することはない。「とりあえず減速または停止して状況を確認しよう」と判断するのが通常である。
カメラシステムにせよ,ミリ波レーダーシステムにせよ,「得られた情報」からその「意味」や,「認識していない情報の存在」を推定し,その推定が正しかった場合のリスクを勘案しつつ,適切な判断を行うことは,人間の運転手であれば,普通に行っていることだが,AIに同じ推論を求めることは,現在の技術水準からすると,高いハードルとなるかもしれない注9)。しかし,道路という限定された環境であれば,機械学習による経験を積み重ねることにより,一定レベルの対応能力を備えていくことは可能であろう17)。


上述したテスラ車の事故について,運転手の遺族がテスラ社を相手取り損害賠償請求訴訟を提起したと仮定した場合,テスラ社は法的責任を負うであろうか18),19)。もとより,運転手が7秒間以上前方注視を怠ったとするNHTSAの認定を前提とする限り,事故の基本的原因は運転手にある。しかし,だからといって,テスラ社側に一切の責任がないといえるかは別問題である20)。
おそらくテスラ社は,運転手との間で,次のような免責同意契約を交わしていると思われる。
「Autopilotモードで走行中,運転手は常に安全に注意し,危険があれば直ちに運転に介入する義務を負う。この義務に違反した結果起きた事故について,テスラ社は一切の責任を負わない」
本件の場合,テスラ社は免責同意契約に基づき一切の責任を免れるであろうか。法律家の見解は分かれると思われる。「免れる」とする説の根拠としては,「レベル2の自動運転車が常時の前方注視を必須とすることを承知して免責同意契約を交わした以上,事故の責任をメーカーに転嫁することは不当」,というものが考えられる。
他方,「免れない」とする説の根拠としては,「テスラ社は,自動運転による運転者の負担軽減をうたってシステムを販売し利益を得ているにもかかわらず,片時も注意を怠らない義務を運転者に求めるのは矛盾であるし,少なくとも欠陥があった場合の責任をメーカーが全部免れるのは不当」,というものが考えられる。
5.3 Google AV(レベル4以上)の事故と民法上の責任2016年2月14日,Google社の自動運転車(Google autonomous vehicle, 以下Google AV)が,初めて「AIの過失による」事故を起こした21)。
事故報告書22)によると,自動車は自動運転中,交差点を右折するため一番右側の車線に入ったが,前方に土嚢(どのう)が置かれて道がふさがれていたため停車した。そして,土嚢を避けるため左に方向転換したとき,左後方から直進してきたバスの右側面に接触した。YouTubeには,バス車載カメラからの動画が公開されている23)。これを見ると,Google AVに「左後方に対する注意を怠った過失」があることは明らかだ。
では,この事故が日本で起きた場合,バス会社は,誰に対してバスの修理代金を請求できるだろうか。本件では,テストドライバーが同乗していたが,仮に無人であったとして考える。
5.3.1 オーナーの責任まず,自動車のオーナーの責任が考えられる。民法718条1項は,「動物の占有者は,その動物が他人に加えた損害を賠償する責任を負う」と定めている。もとより自動車は「動物」ではないが,自動運転車に関する法律が制定されるまでの間は,この条項が類推適用されるであろう。したがって,たとえば左後方のセンサーが故障していることを知りえたのに,運行させたオーナーは,損害賠償責任を負う。
もっとも,同条項但書は「相当の注意をもってその管理をしたとき」には免責されると定めている。したがって,事故の原因がAIそれ自体にある場合には,オーナーが損害賠償責任を負う可能性は低い。
5.3.2 メーカーの不法行為責任次に,自動車メーカーの責任はどうか。考えられるものとしては,過失による不法行為責任(民法709条)と,製造物責任がある。
第1に,メーカーが過失による不法行為責任を負うためには,本件事故がメーカーにとって予見可能であり,かつ,回避可能であったことを,被害者が証明しなければならない。しかし,ディープラーニングで経験を積んだAIの場合,メーカーといえども,あらゆる場面においてクルマがどう振る舞うかを予見することは困難と思われる。
したがって,そのAIが先に述べた「運転免許試験」に合格し,公道走行認証を受けたAIである限り,メーカーには原則として過失はないことになろう。例外として,「AIが特定の場面で誤った判断をする」ことをメーカーが事前に知っており,かつ,適切な期間内にリコールやプログラムの書き換えを行わなかった場合には,損害賠償責任を負う。
5.3.3 メーカーの製造物責任第2に,製造物責任法は「製造物」の「欠陥」により発生した損害について,製造者等の損害賠償責任を定めている注10)。
ここで「製造物」とは「製造され又は加工された動産」をいうので,ソフトウェアそのものは,「製造物」に当たらない。しかし,現在の裁判実務では,ソフトウェアが組み込まれた機械は「製造物」に当たるとされている注11)。もっとも,自動運転車に搭載されるほど高度なAIの「過失」が「製造物の欠陥」といえるかについては,将来,議論となる余地があろう24)。
たとえば,実際に起きた事故の状況を再現すると,AIが必ず誤った判断をするのであれば,「欠陥」があると認定してよい。しかし,高度に知能化されたAIの場合,再現性がない場合もありえよう。このような場合,事故を起こしたAIの「過失」は明白であっても,「欠陥」があるといいうるのかについては,疑問が残る。
しかも,製造物責任法4条1項は,「当該製造物をその製造業者等が引き渡した時における科学又は技術に関する知見によっては,当該製造物にその欠陥があることを認識することができなかったこと」を証明した場合,製造者等は責任を免れると規定している(開発危険の抗弁)。したがって,完全自動運転車の「過失」が予見不可能であるとして,開発危険の抗弁が認められる場合もありうるだろう。
このようにみてくると,完全自動運転車が事故を起こした場合,被害者がAIの「過失」や「欠陥」を立証してオーナーやメーカーの責任を問うことは,有人自動車による事故の場合に比べて,困難であることがわかる。このことは一見,自動車メーカー側に有利に思えるが,そうではない。自動運転車が事故を起こしたにもかかわらず,被害者が救済されないため,「自動運転車にひかれた方が損」という評価が流布すれば,自動運転車は社会に受容されないからである。したがって,自動運転車を普及させるためには,被害者救済を目的とする,適切な保険制度の整備が不可欠となる。
6.1 完全自動運転車と自賠責保険自動車損害賠償保障法(以下,自賠法)は,「自動車の運行によって人の生命又は身体が害された場合における損害賠償を保障する制度を確立することにより,被害者の保護を図り,あわせて自動車運送の健全な発達に資することを目的」として,自動車注12)について保険加入を義務づけたうえ,人身事故が起きた場合,「運行供用者」に厳しい注13)損害賠償義務を課し,賠償金を保険金で賄うとしている25)。
完全自動運転車の事故に自賠法が適用されるか注14)について,藤田友敬東京大学教授は,「自賠法上の「運行」が存在することに疑いがない」として,これを肯定している26)。筆者は,「運行」の問題ではなく,完全自動運転車も「自動車」である以上,自賠法の適用があると考える注15)が,いずれにせよ,完全自動運転車が起こした事故について,自賠法の適用を全面否定する見解はない。したがって,完全自動運転車が人身事故を起こした場合,被害者またはその遺族は自賠責保険金を受け取ることができる。ただし,保険金額には上限がある(死亡の場合3,000万円)ため,被害者救済に不十分である場合もある。
6.2 完全自動運転車と任意保険一方,現在販売されている任意保険は,いわゆる賠償責任保険であって,被保険者に民法上の損害賠償責任の生じることが保険金支払い要件となっているから,任意保険金を受け取るためには,被害者が,加害者の過失を証明する必要がある。完全自動運転車が起こした事故の場合,被害者がメーカーの過失を立証することは困難だから,自動運転車普及のためには,過失要件を(被害者側からみて)緩和した保険商品の開発が必要となる。2016年11月8日の日本経済新聞は,東京海上日動火災保険がレベル3までの自動運転車について,運転者に過失がなくても被害者に保険金を支払う任意保険の無料特約の提供を始めると報じた27)。今後,完全自動運転車についても,同様の保険が開発されることになろう。
6.3 「二階建て」保険制度の要否もっとも,任意保険が過失・欠陥要件を緩和することになると,同じく過失・欠陥要件を緩和した自賠責保険と任意保険の相違点は,保証金額の上限のみに帰することになる。また,完全自動運転車による重大事故の発生率が劇的に減少すると,保険料の大幅減額は必至となる。すなわち,完全自動運転車の普及は,「交通事故」という損害保険市場を大幅に縮小させるうえ,自賠責保険制度と任意保険制度という日本独特の二階建てシステムの要否を問うことになる。これは,省益も絡む重大な政治問題となりかねない。筆者は,保険制度の混乱こそ,完全自動運転車の普及を阻む最大要因になるのではないかと危惧している。
自動運転技術は,近年飛躍的な進歩を見せたとはいえ,いまだ発展途上である。千変万化する実環境への適応,人間が運転する自動車や自転車,歩行者の行動予測など,克服するべき技術的課題は多い。完全自動運転車は,まず,高齢者の多い都市近郊のニュータウンにおける送迎サービスや,高速道路における隊列自動走行など,限定され変化の少ない環境下での実証実験を経て,実用化へ進んでいくことになろう。
一方,自動運転車,特に完全自動運転車の実用化を前提とした法規制の整備も,喫緊の課題である。法規制は,自動運転技術や,安全対策の標準化,事故が起きた場合における法的責任の所在や被害者の救済に関わるものまで,多岐に及ぶ。これらの法規制は,安全を確保し,被害者を救済するに十分なものである一方,製造者の過度な負担を回避し,世界市場におけるわが国の優位性を保つものである必要がある。しかも,人命にかかわる技術である以上,哲学的倫理的考察が不可欠である。
わが国は,自動運転に関する技術面での研究では世界最先端にあるが,哲学的・倫理的・法的検討においては,欧米に後れをとっているように思われる。今後は,技術の発展に即した法規制の検討を加速させる必要がある。
1962年生まれ。1992年弁護士登録(44期)。大阪弁護士会。ロボット革命イニシアチブWGコアメンバー,JST(CREST)領域アドバイザー,総務省AIネットワーク社会推進会議「開発原則分科会」構成員,経産省・総務省IoT推進コンソーシアム カメラ画像利活用SWG委員等。