Abstract
海洋研究開発機構(JAMSTEC)では,インド洋観測システムの中核を担うResearch Moored Array for African-Asian-Australian Monsoon Analysis and Prediction(RAMA)の一環として,2006年より東部熱帯インド洋にm-TRITONブイを3基展開している.近年では,係留期間の増加とバンダリズムの深刻化に伴って,ワイヤーロープの損傷,およびセンサの損傷や喪失が増えており,リアルタイムデータの取得率は60%未満,回収データの取得率についても最も低い場合では50%程度と,データ取得率が低下した時期があった.データ取得率向上のために,テクノーラ®シートを巻き込んだワイヤーロープや水中センサ用の漁具対策クランプなどの開発を行い,バンダリズム対策を実施してきた.その結果,水中データ取得率は90%まで改善した.気象データの取得率については,センサの種類とハウジング構造の見直しにより向上してきてはいる.しかし,水中データの取得率である90%までには至っておらず,改善が必要である.
1. はじめに
インド洋熱帯域の大気海洋変動では,アジアモンスーンに伴う季節変動が卓越するとともに,日変化のような短周期変動からインド洋ダイポールモード現象(Saji et al., 1999)で代表される経年変動まで,様々な時空間規模の変動が混在し,これらが相互に影響を及ぼしている.このような複雑な気候システムのメカニズムを明らかにするために,インド洋における熱帯ブイ網(Research Moored Array for African-Asian-Australian Monsoon Analysis and Prediction:RAMA)が構築されている(McPhaden et al., 2009).RAMA係留ブイ観測網は,日本をはじめ,アメリカ,インド,インドネシア,フランス,中国,オーストラリア,アフリカ東部諸国などの関係機関の国際協力によって維持・展開が進められている(図1).
海洋研究開発機構(JAMSTEC)は,RAMA係留ブイ観測網が整備されるより前の2001年10月に,インド洋における気候モニタリングとしては初となる大気海洋観測ブイ(TRITONブイ)を設置して観測を開始して以来,インド洋東部熱帯域の観測を継続している.2006年12月からは,TRITONブイの後継機として新たに開発したインド洋小型トライトンブイ(m-TRITONブイ)による観測を1.5°S90°E(南緯1.5度,東経90度付近の点,以下同様)で開始し,順次TRITONブイと置き換えていった.現在は,5°S95°E,1.5°S90°E,8°S95°Eの3測点にてm-TRITONブイによる観測を実施しており,RAMA係留ブイ観測網に貢献している.2006年~2007年には,インド洋ダイポールモード発生時における海洋内部の変動を世界で初めて観測するなどの成果を挙げてきた(Horii et al., 2008).気候変動のメカニズム解明のためには,長期にわたって現場観測データを蓄え続けることが重要であり,ブイデータの取得率の向上は大きな意義がある.
m-TRITONブイは,風向風速,気温,相対湿度,雨量,短波放射,水温・塩分(深さ1 m,10 m,20 m,40 m,60 m,80 m,100 m,120 m,140 m,200 m,300 m,500 m),流向流速(10 m)を観測する(図2).気象データは,信号処理装置によって10分毎に収集・記録される.一方,クランプでワイヤーロープに固定された水中センサで取得された水中データは,各センサの内部メモリに記録されるとともに,電磁誘導モデムによって10分~1時間間隔で信号処理装置に記録される.収集された10分毎の観測データは,Argos3通信装置によって,リアルタイムで陸上へ送信される.
Arogs3は通信速度4800 bps,通信容量4608 bitの通信能力を有しており,従来のArgos2(200 bps × 256 bit)と比較して飛躍的に性能が向上した.また,Argos3は双方向通信を行うため,飛来した衛星からのデータ送信要求を受信したタイミングでデータを送信することが可能である.そのため,Argos3による通信は,Argos2と比較して5倍となる5 Wの電力が必要となるが,バッテリ容量は従来と同等の容量で観測することができる(JAMSTECプレスリリース,2009).
m-TRITONブイでは,その係留索の全長を水深の約1.3倍とするスラック係留方式を採用している.スラック係留では係留索に掛かる張力が小さくなるため,緊張係留に比べてトップブイに大きな浮力を必要としない.そのため,トップブイの小型化が可能となり,比較的小型の船舶でも設置回収が可能である.このため,JAMSTEC所有の船舶に限らず,様々な船舶での運用が可能となる利点がある.
一方,スラック係留とすることで,トップブイが風や海流によって自由に動くという欠点もある.8°S95°E の場合,m-TRITONブイの設置位置の水深は5260 mであるので,水深と係留索長(水深×スコープ比:1.32)の関係から\(\sqrt {\left( 5260\times 1.32 \right)^{2}-{5260}^{2}} =4532\)となり,トップブイは半径 4532 mの範囲内を移動する.トップブイが移動することによって,水中センサを取り付けているワイヤが傾き,結果として水中センサの観測深度が大きく変動する.そのため,水温と塩分については,基準層への内挿を必要とするなど(Ueki et al., 2010),データ処理が複雑になる.
本稿は4章で構成されており,第2章でデータ品質管理(QC)の概要を説明し,QC済みのデータから集計した有効データ取得状況を示す.第3章でデータ取得率の向上に関わる改善について紹介し,最後の第4章で本稿のまとめと今後の課題を記す.
2. データ取得状況
2.1 データQC
m-TRITONブイで行うデータQCとは,データの品質に応じて,表1に示したQuality Index(QI)を付与することである.閾値異常,密度逆転,雨量計排水,夜間の短波放射に対しては,該当するQIを品質管理システムによって自動的に付与する(自動QC).自動QC後のデータに対して,人間の目で異常値の有無を判断して,最終的に付与するQIを決定する(ビジュアルQC).ビジュアルQCで異常と判断されるデータは大きく分けて,スパイクデータ,センサの故障・破損による異常データ,および船舶などに牽引された際のデータの3つに分類される.
船舶などがトップブイに係留して牽引するような場合,繊維ロープが伸びて,トップブイが計算値以上移動することがある.これまでに,アンカー位置から5740 m移動したことも観測された.牽引された時に観測された水温・電気伝導度は,観測深度が非常に浅くなるため,基準層内挿誤差が大きくなる.この様な場合には,全深度で異常値として扱うこととしている.
自動QCとビジュアルQCは,Argos3で取得されるリアルタイムデータとブイ回収後に各センサおよび信号処理装置の内部メモリから得られる回収データに対して行う(以後,前者をリアルタイムQC,後者を回収QCと呼ぶ).リアルタイムQCと回収QCは基本的に同様の処理を行うが,回収QCでは,圧力,水温,電気伝導度,気温,相対湿度,短波放射,雨量について,事前・事後較正の結果から見積もられたセンサの経時変化を補正する.そのため,回収データはリアルタイムデータと比較してより品質が高い(松本ほか,2001,植木ほか,2003,Ando et al., 2005).
表2は,m-TRITONブイの設置航海,観測期間,設置緯度経度とブイ観測番号を表す.観測番号は始めの2文字がブイの設置位置,残り3文字が世代を表す.m-TRITONブイは航海毎に改良が施されているため,データ取得率は航海毎に算出したものを用いる.データ取得率の算出は,回収QCが終了しているKY12-08までのデータについて行った.Argos3の正常通信率については,現在観測中のMR14-06までを対象とする.本稿では,データ取得率とArgos3の正常通信率について,各月の上旬,中旬,下旬において取得すべきデータ件数に対する正常なデータ取得件数の割合と定義した.
2.2 リアルタイムデータ取得率
図3は航海毎のArgos3の正常通信率の時間変動を示す.KY09-01~KY12-08で設置されたブイでは,衛星通信容器またはケーブルの浸水によって通信不調・通信途絶となることがしばしばあった(表3).そのため,係留終了時の正常通信率が50%以下と低い.係留後の調査で,衛星通信容器のコネクタを通す穴がわずかに大きかったため,Oリングが機能不全だったことが確認された.浸水対策として,コネクタ部の穴を小さくし,形状も変更した(図4).MR14-01で設置したm-TRITONブイには浸水対策後の衛星通信容器を搭載し,正常通信率は95%以上を維持することができた.しかし,次航海のMR14-06で設置した観測番号17507(本稿執筆時点で観測中)のArgos3が突如通信途絶となった.通信途絶前後で異常な観測値は取得されておらず,原因究明のため,回収後の調査が待たれる.
KY12-08では,観測開始後8~9ヶ月に,一時的に正常通信率が0%になった(図3).これはArgos3システムを搭載しているMETOP-A衛星の不調によるものである.METOP-Aを運用しているCLS社(仏)がArgos3システムを再起動して通信が復旧した.Argos3の運用を開始してから,衛星システムの不具合によって双方向通信が不能となったのは,この1回だけである.
図5は,リアルタイムデータにおける各センサのデータ取得率の平均値である.リアルタイムデータは,センサの不具合による取得率の低下に加えて,リアルタイム通信システムの不調による通信途絶も加わるため,比較的データ取得率の良い水中データについても60%未満と低い.しかし,詳細は2.3で述べるが,回収データによって通信不具合による欠測が復活するため,最終的なデータ取得率は80~90%まで回復する.
2.3 回収データ取得率
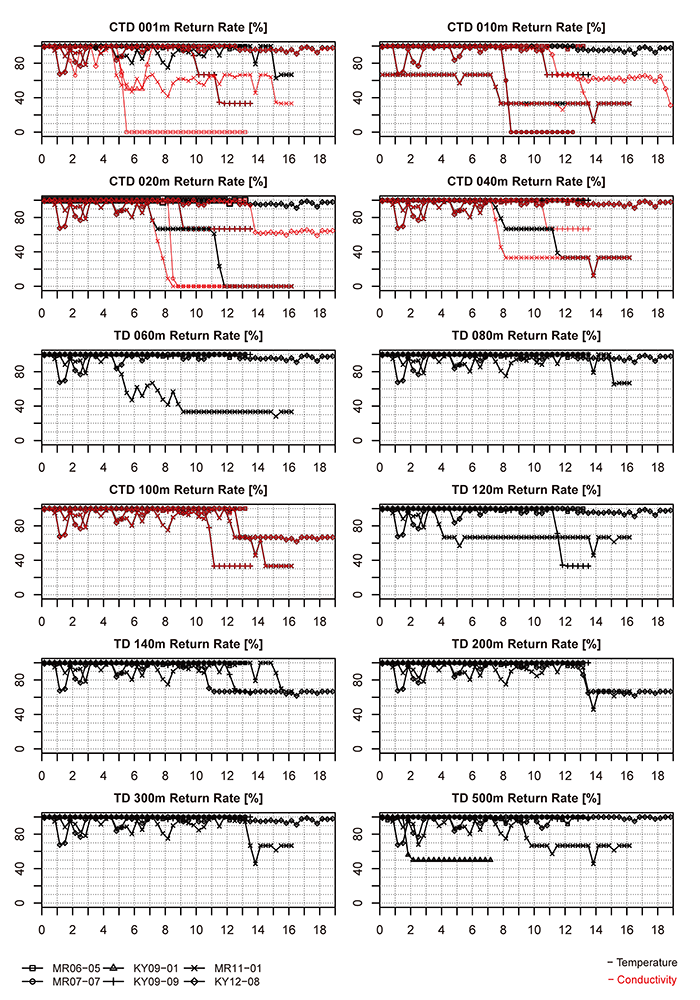
図6は,各センサの回収データに関する取得率について,観測開始からの時間変動を表したもので,図7は,回収データにおける各センサのデータ取得率の平均値である.水温については,概ね90%程度のデータ取得率はあるが,表層付近の10 m,20 mのデータ取得率は80%,84%と,他の深度のデータ取得率に比べて低い(図7).その主な原因はセンサのずれ落ち・せり上がりによるものである.例えば,MR11-01で設置した観測番号19502は,観測開始から7ヶ月後に,10 mのセンサがずれ落ちはじめ,最終的に流速計と10~60 mのセンサが80 mのセンサの直上まで移動していた(図8a).そのため,MR11-01に設置したブイの水中データ取得率は観測開始後5ヶ月を経過して低くなっている(図6).センサがずれ落ちた直接的な原因は明らかにはなっていないが,延縄漁や巻き網漁で用いられる漁具がセンサに絡まった結果,センサが移動した可能性が高いと考えられる.センサがずれ落ちる事象は計13センサで発生し,そのほとんどは10~20 mに取り付けられたセンサである.結果として,表層付近のデータ取得率が他の深度と比較して低下している.
20 m以浅の電気伝導度のデータ取得率が水温よりも5~9%低い主な原因は,電気伝導度センサのセル内に生物が付着することによるものと考えられる.図6において,電気伝導度のデータ取得率が水温のデータ取得率よりも低下するタイミングは,設置から5~8ヶ月である.電気伝導度は通常正の方向に経時変化するが(松本ほか,2001,植木ほか,2003),回収QCで異常と判断された電気伝導度は,故障したセンサを除いて,全て負の方向に変化していた.表層付近では生物生産が活発で,センサ回収時には大量の生物が付着している.生物付着による値の変化は,事前・事後較正から見積もった経時変化量では補正できないため,データ取得率が低下することとなる.
流速計については,データ取得率が38%と,水温のデータ取得率と比較して非常に低い.これは,当初採用されていたDVS流向流速計に,バッテリ不良が原因と推測される不具合が発生し,設置後3ヶ月程度で観測不能になることが多かったためである.
水中センサ全般について,トップブイが船舶によって牽引された場合,データQCによって水中データを異常値と判断するため,全深度で同期するようにデータ取得率が低下する.例えば,図6のKY12-08の観測開始後1~2ヶ月に全深度のデータ取得率が70%未満まで低下しているが,これはブイが船舶によって牽引されたためである.
洋上部のセンサは,漁船によるバンダリズム被害の影響を受けやすいため,水中部と比較するとデータ取得率が低い.図8bは,観測番号19502の回収時の洋上センサの様子である.風速計,雨量計,短波放射計のセンシング部は全損,温湿度計は損傷しており,センサポールは折れ曲がっていた.特にバンダリズム被害を受けやすい風速計では,観測開始から90%以上のデータ取得率を維持できる期間は約6ヶ月である.風速計の最終的なデータ取得率は32%で,係留終了時まで観測を続けていたセンサは延べ15センサ中1センサであった.
3. データ取得率向上に関わる改善
流速計について,m-TRITONブイ開発当初に採用していたDVS流速計は,2.3でも記した通り,バッテリ不良が原因と推測される不具合よって,観測期間の途中で計測を停止することが多かった.この対策として,KY12-01以降に設置したm-TRITONブイから,Aquadopp流速計へ変更した.Aquadopp流速計に変更後,係留初期に不具合は発生しておらず,観測終了までデータを取得することができている.一方で,生物付着によって観測終盤にデータ品質が低下するという問題が発生した.この問題に対しては,送受波器面に付着する生物の影響を検証して,生物付着防止剤の塗布がデータ品質に与える影響を評価して問題が無いことを確認した.今後設置予定のm-TRITONブイでは流速計に生物付着対策を行うこととしており,データ取得率の向上が期待される.
短波放射計について,初期のセンサは観測開始から3ヶ月程度で故障することが多かった.回収後の調査で,センシング部に結露が生じており,ハウジング構造に問題があることが判明した.対策として,センシング部を囲うように,ハウジング下部にOリングを追加して防水性能を強化した(図9).改良型の短波放射計はKY09-09より採用しており,現在では,気象センサの中で最もデータ取得率が良い.
機器の問題以外で,データ取得率を低下させる要因として,漁労によるバンダリズム(DBCP, 2011)が挙げられる.ブイの周辺にはカツオやマグロなどの魚が蝟集するため,漁船がブイ周辺で漁獲を行うことが想像される.また,2012年以降になると,より多くの魚を蝟集させるため,図8cに見られるようなパヤオやFAD(Fish Aggregating Devices)が仕掛けられる場合もある.その結果,係留索や気象・水中センサがダメージを受けて,有効なデータを取得することができなくなる事象が発生する.データ取得率向上のためには,バンダリズム対策が重要となる.
係留索の上部を構成するワイヤーロープは,延縄漁に使われるテグスと擦れることで被覆が破られ,結果として電磁誘導モデムの通信に不具合が生じることがある.最悪の場合,ワイヤーロープが錆びて断裂し,ブイが流出する.この対策として,被覆の樹脂を高硬度のものに変更し,さらにワイヤーロープの外皮の下にテクノーラ®シートを巻き込んで摩擦に対する抵抗力を高めた(図10).
延縄漁や巻き網漁で使用される漁具が水中センサと絡まってセンサがずれ落ちたり,せり上がるのを防止するために,漁具対策クランプを開発した(図11).漁具対策クランプを装着したKY12-08設置のブイでは,漁業被害によるセンサの故障およびセンサのずれ落ち・せり上がりは発生していない.バンダリズム被害が悪化したMR11-01設置のブイでは,回収時の水中センサの平均データ取得率が50%に低下したが,KY12-08で設置したブイでは,回収時の水中センサの平均データ取得率は90%まで改善した.
風速計について,KY09-09よりベーン式から超音波式へ変更した.超音波式はセンシング部がコンパクトなため,バンダリズムの影響を受けにくく,データ取得率は改善しつつあったが,バンダリズム被害が悪化したMR11-01以降の観測では,観測不能となることが多くなっている.バンダリズムによる影響は,風速計に限らず,洋上部にある気象センサ全般に言えることである.現在,気象センサのバンダリズム対策として「鉄仮面」と呼ばれるセンサ防護用構造物を製作中である.「鉄仮面」は,トップブイにメッシュのある筒状の構造物を取り付け,その内部にセンサを配置するものである(図12).通気性を確保するためにスリットを多く取ることで(開口率62%),実用上有効なデータを取得できるように配慮している.風速計と短波放射計については,構造物の影響を受けない最上部に配置する.このような「鉄仮面」を2016年11月に予定している次期航海にて設置予定のm-TRITONブイから採用する計画である.今後,気象センサのデータ取得率向上が期待される.
4. まとめと今後の課題
近年のバンダリズムの深刻化によって,ワイヤーロープの損傷や水中センサのずれ落ち・せり上がりが発生していたが,ワイヤーロープの改良や漁具対策クランプの開発などのバンダリズム対策によって被害は軽減されてきた.また,流速計,風速計の変更や短波放射計の改良などのセンサの見直しによって,データ取得率は向上しつつある.しかしながら,洋上部にある気象センサはバンダリズムの影響を受けやすく,そのため水中センサに比べてデータ取得率が低い.現在開発中の「鉄仮面」によって,気象センサのデータ取得率の向上を期待したい.
これまでのm-TRITONブイの改善によって,バンダリズム被害,特に延縄漁に対する耐性は大きく向上した.しかし,巻き網漁を行うような大型の漁船がブイ設置点近傍で操業した場合の被害は大きく,継続した定点観測を行うことは難しいのが現状である.海洋資源の保全の観点から,インド洋においてはIOTC(Indian Ocean Tuna Commission)によって巻き網漁獲の規制が行われている.しかし,ブイ設置海域では,バンダリズム被害の状況と現場海域で観測される操業の様子から,頻繁に巻き網漁が行われていると考えられる.今後も状況に応じてバンダリズム対策を行うことが必要である.一方で,沿岸諸国に対して,RAMA係留ブイ観測網の意義と巻き網漁が海洋資源に及ぼす影響に対して啓蒙活動を行い,ブイ周辺での巻き網漁の操業を抑制させることも重要である.
謝辞
m-TRITONブイによる観測は多くの人々の多大なる貢献のもとに実施されています.設置・回収・点検を実施していただいた船舶の船長・乗組員の方々,また,ブイの整備・運用を実施していただいた海洋研究開発機構の研究者,技術者,および(株)マリン・ワーク・ジャパンの観測技術員の方々に感謝の意を表します.最後に,本報告の改善について,査読者から大変有益なご指摘をいただきました.ここに記して深く感謝を申し上げます.
参考文献
-
Ando, K.
,
T. Matsumoto
,
T. Nagahama
,
I. Ueki
,
Y. Takatsuki
, and
Y. Kuroda
(2005), Drift characteristics of moored conductivity-temperature-depth sensor and correction of salinity data, J. Atmos. Oceanic Technol., 22, 282-291.
-
Data Buoy Cooperation Panel
(2011), Ocean data buoy vandalism: Incidence, impact and responses, DBCP Technical Document No.41, 1-47.
-
Horii, T.
,
H. Hase
,
I. Ueki
, and
Y. Masumoto
(2008), Oceanic precondition and evaluation of the 2006 Indian Ocean Dipole, Geophys. Res. Lett., 35, L03607, doi:10.1029/2007GL032464.
-
JAMSTECプレスリリース
(2009),「世界で初めてARGOS-3システムによる高速データ通信に成功~気候変動研究の促進や多くの研究分野への利用拡大への期待~」,<https://www.jamstec.go.jp/j/about/press_release/20090413/>.
-
松本 健寛
,
長濱 徹哉
,
安藤 健太郎
,
植木 巌
,
黒田 芳史
,
高槻 靖
(2001),トライトンブイの水温・塩分(電気伝導度)センサーの経時変化と補正,海洋科学技術センター試験研究報告,44, 139-151.
-
McPhaden, M. J.
,
G. Meyers
,
K. Ando
,
Y. Masumoto
,
V. S. N. Murty
,
M. Ravichandran
,
F. Syamsudin
,
J. Vialard
,
L. Yu
, and
W. Yu
(2009), RAMA: The Research Moored Array for African-Asian-Australian Monsoon Analysis and Prediction, Bull. Amer. Meteor. Soc., 90, 459-480.
-
Saji, N. H.
,
B. N. Goswami
,
P. N. Vinayachandran
, and
T. Yamagata
(1999), A dipole mode in the tropical Indian Ocean, Nature, 401, 360-363.
-
植木 巌
,
松本 健寛
,
長濱 徹哉
,
安藤 健太郎
,
黒田 芳史
(2003),トライトン電気伝導度センサーの経時変化補正法の改良,海洋科学技術センター試験研究報告,47, 49-67.
-
Ueki, I.
,
N. Fujii
,
Y. Masumoto
, and
K. Mizuno
(2010), Data evaluation for a newly developed slack-line mooring buoy deployed in the eastern Indian Ocean, J. Atmos. Oceanic. Technol., 27, 1195-1214, doi:10.1175/2010JTECHO735.1.