Abstract
2011年に海洋研究開発機構で導入された可搬式マルチチャンネル反射法地震探査(可搬式MCS)システムでは,運用を開始して以来,ストリーマーケーブルの複数のアクティブセクションに同時に現れるノイズ(等走時ノイズ)が発生している.この等走時ノイズは,スクリューの回転あるいは電源系に起因して周期的に現れる場合,およびランダムに発生する場合がある.ノイズの発生はストリーマーケーブルの電気的性質に起因すると推定されているが,現在のところ根本的な解決には至っていない.中でもランダム型の等走時ノイズは,反射波シグナルより強い振幅かつ反射波シグナルに近い周波数帯域で現れることが多いため,重合後データに対しての悪影響が大きい.可搬式MCSデータの処理においては等走時ノイズのみを抑制し,シグナルを残すようなデータ処理法を適用する必要がある.等走時ノイズの速度特質を利用し,速度フィルターの一種であるF-Kフィルター(周波数・波数領域フィルター)の適用を試みたところ,完全に除去することはできないものの,ノイズの影響を抑制することができた.
1. はじめに
2011年に海洋研究開発機構で導入された可搬式マルチチャンネル反射法地震探査システム(可搬式MCSシステム,三浦ほか,
2013)は,東北沖日本海溝や南海トラフ,オントンジャワ海台などにおける高分解能反射法探査に用いられてきた(たとえばNakamura et al., 2013など).この可搬式MCSシステムは,海洋研究開発機構の所有する複数の船舶でオペレーションが可能である.これまでに「かいよう」「かいれい」「みらい」「よこすか」を用いた可搬式MCS調査航海が行われてきた.2016年までの日本海溝可搬式MCS調査測線をFig. 1に示す.
この可搬式MCSシステムでは,運用を開始して以来使用する船舶に依らずストリーマーケーブルの複数のアクティブセクションに同時に現れるノイズ(等走時ノイズ)が発生している(Fig. 2).これまで船上で実施したトラブルシュートおよびその原因究明から,スクリューの回転に連動して周期的に現れる場合,電源系に起因して周期的に現れる場合,およびランダムに発生する場合があることが分かった.このうち,スクリューの回転に連動して発生する等走時ノイズは,プロペラ軸アースの清掃によって発生を抑制することができ,電源系起因のものは給電経路によって抑制可能である.ところが,ランダム型の等走時ノイズはストリーマーケーブルの電気的性質に起因すると推定されているものの,現在のところ根本的な原因究明・解決には至っていない.
いずれの場合の等走時ノイズも,反射波シグナルより強い振幅かつ反射波シグナルに近い周波数帯域で現れることが多いため,例えば通常の帯域通過フィルターでは除くことができず,残したままでは重合後データに対しての悪影響が大きい(Fig. 3).不良トレースとして等走時ノイズを除去すると重合数の減少は避けられず,場合によっては地震探査断面における欠測部分(重合数=0の空白区間)を生じ,取得データの品質を著しく低下させることもある.
本報告では,このような取得データ品質の低下を防ぐため,特にデータへの悪影響の大きいランダム発生型の等走時ノイズに着目して抑制することで,地下構造の反射波シグナルを残すようなデータ処理法を検討した.
2. データとその標準処理
2.1 可搬式MCSデータ
可搬式MCSデータは,Bolt社製2800LLXエアガンクラスターを震源とし,Geometrix社製ストリーマーケーブルを受信部としたマルチチャンネル反射法地震探査システムにより取得される(三浦ほか,2013).
本報告では,調査中に等走時ノイズが顕著に混入した,東北沖日本海溝における深海調査研究船「かいれい」を用いたHDMY027,HDMY033(KR13-06航海),HDMY077(KR13-11航海)の各測線のデータを用いた(Fig. 1b).いずれの測線も,総容量380立方インチ(6.23 $l$)のエアガンを深度5 mで曳航し,37.5 m間隔で発振している.深度6 mで曳航したストリーマーケーブルのチャンネル間隔は6.25 m,チャンネル数は192 chであるため,これらの測線における標準重合数は16となる.
2.2 標準データ処理
可搬式MCSデータは,船上における標準処理として,ジオメトリ編集,帯域通過フィルター適用,静補正,振幅回復,トレース編集,速度解析,CDP重合,および重合後時間マイグレーション処理までを実施している(Fig. 4).トレース編集においては不良トレースの削除を行っており,自然地震,ミスショットまたはレコードタイミングがずれたショット,ストリーマーケーブルからの信号にスパイク状に混信した電気的ノイズ,漂流物の接触によるノイズ,および等走時ノイズを削除対象の不良トレースとしている.トレース編集後のデータに対し速度解析を行い,CDP重合とマイグレーションを適用する.本報告では,等走時ノイズ抑制の可能性について検討するため,トレース編集の段階(Fig. 4の★印参照)でトレース削除以外の抑制処理を試みた.
3. 等走時ノイズとF-Kフィルター設計
3.1 等走時ノイズの出現
等走時ノイズはFig. 2に示すように,ショットギャザー内で複数のチャンネルの同じ走時で出現するノイズである.このノイズの出現するトレースは観測中に変化せず,1本あたり8チャンネルで構成されるアクティブセクションをひとまとまりとし,複数本のアクティブセクションに及んでいる.ショットギャザー上で直線状に並ぶため,出現した際の反射波シグナルとの判別は容易である.2.2で述べたように,船上での標準処理においてはトレース編集で等走時ノイズの出現したトレースを削除しゼロ振幅とすることでその影響を排除している.この場合,ノイズトレース削除後のデータでCDPギャザーを編集してしまうので,ノイズトレース削除前のデータで編集したCDPギャザーに比べ重合数の減少は避けられない(Fig. 5).
MCSデータ処理において重要な重合数の確保という面では,トレース削除による欠損を避けるため,抑制処理を効果的に適用する必要がある.従来知られてきた,ストリーマーケーブルの特性によるノイズは,電源の影響によるノイズが代表的であった(例えばButtler and Russel, 1993,Xia and Miller, 2000など).電源に依存するノイズであれば,特定の周波数を対象としたフィルター処理などで抑制可能であり,Block subtraction法やSinusoidal subtraction法など(Buttler and Russel, 1993)やLevenberg-Marquardt法(Xia and Miller, 2000)などが提唱されている.しかしながら,本報告に示す等走時ノイズは前述の通り,ランダムなタイミングでショットギャザー内に同一の走時で現れ,その波形は反射波シグナルより強い振幅かつ反射波シグナルに近い周波数帯域である.先に例示したような電源に依存するノイズとは区別され,同様のアプローチでは抑制できない.
等走時ノイズが連続して出現した場合,地震探査断面における欠測部分(重合数=0の空白区間)を生じることもある.このような等走時ノイズがデータに出現することを前提として,等走時ノイズのみを抑制し,シグナルを残すような抑制処理を考える必要がある.本報告では,等走時ノイズが同一ショット内の複数のチャンネルの同じ走時で出現する特性を考慮し,コヒーレントノイズの抑制などに用いられるF-Kフィルター(周波数・波数領域フィルター,たとえばHsu et al., 2016など)をショットギャザーに適用することでノイズの低減を試みた.
3.2 F-Kフィルターの設計と適用
T-X領域(時間・距離領域)におけるコヒーレントノイズは,その傾きによってF-K領域(周波数・波数領域)上で区別することができるとされる(たとえばYilmaz, 2001など).
等走時ノイズは,これまで述べてきたようにショットギャザー内で同一の走時に現れる.すなわち,震源からチャンネルのオフセットに関わらず同時に出現する(T-X領域において$\mathrm{dt/dx}=0$となる)ことになる.ショットギャザー上で反射波の走時は双曲線となる性質を持つ.この性質は,シグナルと等走時ノイズとをF-K領域において区別できる可能性を示唆する.F-K領域においてシグナルとの区別が可能であれば,速度フィルターの一種であるF-Kフィルターの適用で等走時ノイズの抑制が可能になると考えられる.この場合,反射波シグナルは波数kがT-X領域でのdt/dxの値に応じた0以外の値をとるのに対し,等走時ノイズはF-K領域において波数$\mathrm{k}=0$となる(Fig. 6a).この$\mathrm{k=0}$となる部分を抑制するため,$-0.02\leq \mathrm{k}\leq 0.02$の範囲を遮断波数とするF-Kフィルターを設計した(Fig. 6b).設計したフィルターは,船上における標準処理のトレース編集の段階(Fig. 4の★印参照)で等走時ノイズのトレース削除の代わりに適用を試みた.
4. 等走時ノイズの抑制効果
4.1 F-Kフィルターの注意点
等走時ノイズを含むショットギャザーの全チャンネルに対しF-Kフィルターを適用した結果,等走時ノイズは元の波形に比べ抑制される.Fig. 7にHDMY027測線のSP1449の例を示す.しかしながら,いくつかの副作用を生じる可能性があり,フィルターの適用には注意が必要である.
まず,F-Kフィルターの適用によって,特に深部の反射波シグナルを損傷することである.深部からの反射波は,near traceとfar traceとで走時差が小さく,F-K領域上で等走時ノイズと区別がつきにくい.このようなショットギャザーに対してF-Kフィルターを適用した場合,等走時ノイズと実際の反射波シグナルとがF-K領域において区別できないことによって,反射波シグナルも抑制される場合がある.実際,Fig. 8に示すように,等走時ノイズを削除せずに重合した場合とF-Kフィルターを適用してから重合した場合のCDP重合後の断面(HDMY077測線)を比較すると,F-Kフィルターを適用した重合断面において,沈み込むプレートからの反射波が抑制され,等走時ノイズ抑制前より弱められている.これは本来記録されているはずの地下構造の情報が失われていることを示す.
次に,等走時ノイズの出現するアクティブセクションが不連続であることにより,等走時ノイズの生じていない健全なトレースに偽像が生じることである.F-Kフィルターを適用する前後のショットギャザーとそれらの差分をFig. 7に示す.ショットギャザーに一様にF-Kフィルターを適用した結果,等走時ノイズの抑制効果が見られる一方,等走時ノイズの現れていないトレースにおいてアーティファクト(人工的な波形)を生じている(Fig. 7b-c).これは,等走時ノイズの出現する区間が,アクティブセクション単位の不連続性を持つことが原因である.F-Kフィルター適用の結果,フィルターオペレーターの形状に沿って強振幅ノイズのエネルギーが浸み出し,等走時ノイズを含まないトレースにアーティファクトを生じていることを示している.
以上の点に留意しながらF-Kフィルターを設計する必要がある.
4.2 F-Kフィルター限定適用と等走時ノイズの抑制
等走時ノイズを含まないトレースへの影響を排除するため,ショットギャザー全体に一様にF-Kフィルターを適用するのではなく,等走時ノイズを含むトレースのみを抽出したギャザーを作成し,フィルターを適用した.次に等走時ノイズを含まず,フィルターの対象外としたトレースをフィルター適用済みトレースに加え,全トレース分のショットギャザーとなるように再編集した.比較のため,HDMY027測線のSP1449についてショットギャザー全体にF-Kフィルターを適用した場合と,等走時ノイズ出現トレースに限定適用した場合,それぞれの適用前後の差分をFig. 9に示す.4.1でも述べたように,等走時ノイズと実際の反射波シグナルとがF-K領域において区別しにくい場合,反射波シグナルも僅かながら抑制されるものの(例えばFig. 9の11.7[s]付近の波形),大局的にはF-Kフィルターの適用で等走時ノイズが抑制されている.等走時ノイズの現れるトレースのみを処理ソフトウェア上で指定してF-Kフィルターを適用することにより,等走時ノイズの現れないトレースにおいて,アーティファクトの付加を発生させず,F-Kフィルターの副作用による反射波シグナルの抑制も避けることができる(Fig. 9c, e).

F-Kフィルターの適用によって等走時ノイズがどの程度抑制されるのかを評価するため,(a)F-Kフィルター適用前,(b)ショットギャザー全体にF-Kフィルターを適用後,および(c)等走時ノイズ出現トレース限定F-Kフィルター適用後について,振幅情報を有するサイスミック・アトリビュートであるreflection strength(Taner et al., 1979)の計算を行った(Fig. 10).F-Kフィルター適用前の等走時ノイズのreflection strength値は3.44に達するのに対し,F-Kフィルター適用後の等走時ノイズでは,全体に適用した場合とトレース限定適用の場合のいずれも1.13~1.43程度と約1/3程度にまで抑えられている.この結果は等走時ノイズに対してF-Kフィルターが有効であることを示している.一方,前述した通りショットギャザー全体にF-Kフィルターを適用した場合,等走時ノイズの出現していないトレースにおいてもフィルターの影響が現れる.この場合,本来存在しなかったアーティファクトが付加された結果,等走時ノイズの出現していないトレースのreflection strength値が0.16程度であったものが1.37程度に大きくなっているのが確認された.これに対し,等走時ノイズ出現トレースに限定してフィルター適用した場合,等走時ノイズの出現していないトレースは改変されないため,振幅が保存され,アーティファクトの付加は発生しない.

次に,重合断面における処理の効果について確認する.Fig. 11には,HDMY077測線について,フィルターを適用しない場合の重合断面,ショットギャザー全体にフィルターを適用した場合の重合断面,等走時ノイズ出現トレースに限定適用した場合の重合断面,それぞれの方法によるフィルター適用前後の差分を示す.表示区間はFig. 8と同範囲である.Fig. 11dのF-Kフィルターをショットギャザー全体に適用した場合,等走時ノイズは抑制されるものの,実際のシグナル(海底面および沈み込んだ海洋プレート)も併せて抑制されている.これに対しFig. 11eの等走時ノイズ出現トレースに限定適用した場合,等走時ノイズは抑制されるがFig. 11dよりも実際のシグナルの抑制効果が小さい.これはF-Kフィルターの適用トレースを等走時ノイズ出現トレースに限定することで,等走時ノイズの出現していないトレースのフィルターによる改変を避けられるためである.
このF-Kフィルター限定適用により,等走時ノイズの現れないトレースについては,F-Kフィルターの「副作用」によって元は存在しない等走時ノイズが人工的に付加されることを防ぐことができる.加えて,Fig. 8cとFig. 11eの比較により,深部の反射波シグナルがF-Kフィルターによって抑制される「副作用」についても効果があることが確認された.これは,等走時ノイズの現れないトレースをフィルターの対象から除外することで,ノイズのみを効果的に抑制し,本来の深部反射波をそのまま利用できるためである.
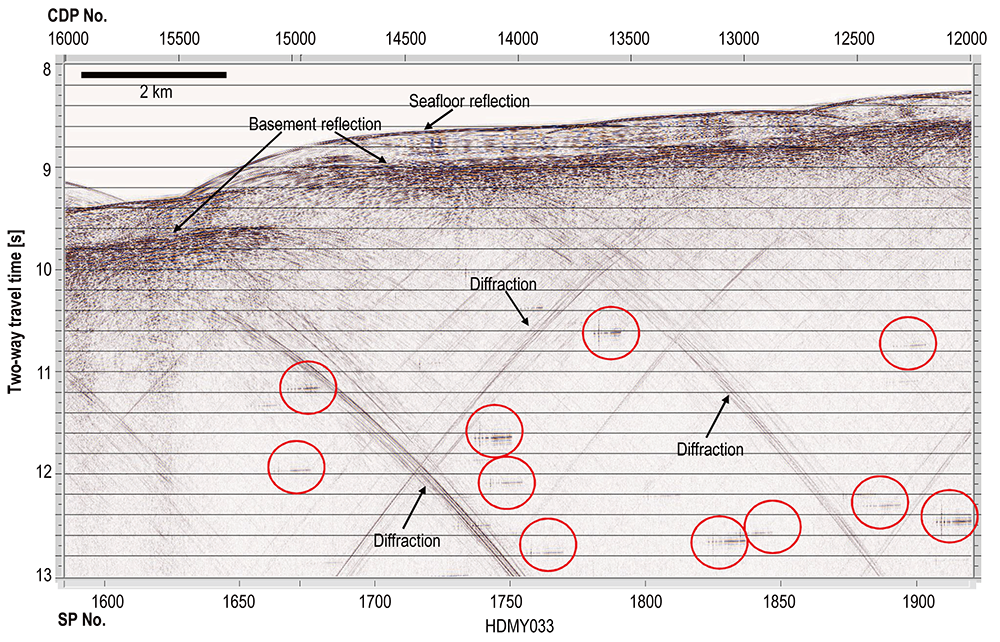
Fig. 12に示す重合断面はF-Kフィルター限定適用の結果を重合したもので,Fig. 3の等走時ノイズを残した重合断面と同じ範囲である.またFig. 3で残存した等走時ノイズを示した赤丸部をFig. 12にも示した.Fig. 12の重合断面上では,一部に残存した等走時ノイズが見られるものの,F-Kフィルター限定適用によりおおむね抑制されている.フィルター適用の結果,前述の通り約1/3程度まで等走時ノイズの振幅を抑えられるため,特に強い振幅を持つノイズ以外は重合後への影響が十分に小さくなっている.以上の結果から,
F-Kフィルター限定適用の重合結果において,等走時ノイズの抑制効果は顕著であるといえる.
5. 結論
可搬式MCSシステムにおける等走時ノイズは,同一ショットギャザー内で震源からのチャンネルのオフセットに関わらず同時に複数のチャンネルに渡ってランダムに出現する.
この等走時ノイズの,T-X領域において$\mathrm{dt/dx}=0$となる性質はF-K領域で$\mathrm{k} = 0$として表される.この付近を抑制するF-Kフィルターを設計することで等走時ノイズの振幅を約1/3程度まで抑制することができる.
ショットギャザー全体にF-Kフィルターを適用した場合,等走時ノイズの出現していないトレースに対してもフィルターの影響があり,結果的に海底面やそれより深部の反射面まで抑制される「副作用」が出る.その「副作用」を抑えるため,フィルターの適用範囲を等走時ノイズ出現トレースに限定することで,元の波形を保存しつつ等走時ノイズを抑制することが可能となった.
謝辞
「かいれい」船長・乗組員の方々にはデータ取得航海の際にお世話になった.日本海洋事業株式会社の観測技術員には航海中のデータ取得および船上データ処理でお世話になった.東京海洋大学の鶴哲郎教授には有益なご助言をいただいた.海洋研究開発機構の白石和也氏と匿名査読者,および担当編集委員の大林政行氏のコメントにより本原稿は大きく改善された.本報告のデータはJAMSTEC地殻構造探査データベースより提供いただいた.記して感謝する.
参考文献
-
Butler, K.E.
and
R.D. Russell
(1993), Subtraction of powerline harmonics
from geophysical records, Geophysics, 58, 898-903.
-
Hsu, H.H.
,
C.S. Liu
,
J.H. Chang
,
Y.T. Tsai
, and
S.D. Chiu
(2016), The suppression of coherent noise from another airgun source in marine
multi-channel seismic data, Mar. Geophys. Res., 37,
257-268.
-
三浦 誠一
,
伊藤 誠
,
大渡 祐樹
,
月岡 哲
,
山下 幹也
,
中村 恭之
,
野 徹雄
,
高橋 成実
,
小平 秀一
(2013),可搬式マルチチャンネル反射法探査システム,JAMSTEC Rep. Res. Dev., 16, 13-21.
-
Nakamura, Y.
,
S. Kodaira
,
S. Miura
,
C. Regalla
, and
N. Takahashi
(2013),
High-resolution seismic imaging in the Japan Trench axis area off Miyagi,
northeastern Japan, Geophys. Res. Lett.,
40, 1713-1718.
-
Taner, M.T.
,
F. Koehler
, and
R.E. Sheriff
(1979), Complex seismic trace
analysis, Geophysics, 44, 1041-1063.
-
Xia, J.
and
R.D. Miller
(2000), Design of a Hum Filter for Suppressing
Power-line Noise in Seismic Data,
J. Env. Eng. Geophys., 5, 31-38.
-
Yilmaz, O.
(2001) Seismic data analysis, Society of Exploration Geophysics, 2027pp.