Article
The o2o3 Local Galerkin Method Using a Differentiable Flux Representation

2022 Volume 100 Issue 1 Pages 9-27

Details
2022 Volume 100 Issue 1 Pages 9-27
The spectral element (SE) and local Galerkin (LG) methods may be regarded as variants and generalizations of the classic Galerkin approach. In this study, the second-order spectral element (SE2) method is compared with the alternative LG scheme referred to as o2o3, which combines a second-order field representation (o2) with a third-order representation of the flux (o3). The full name of o2o3 is o2o3C0C1, where the continuous basis functions in C0-space are used for the field representation and the piecewise third-order differentiable basis functions in C1-space are used for the flux approximation. The flux in o2o3 is approximated by a piecewise polynomial function that is both continuous and differentiable, contrary to several Galerkin and LG schemes that use either continuous or discontinuous basis functions for flux approximations. We show that o2o3 not only has some advantages of SE schemes but also possesses third-order accuracy similar to o3o3 and SE3, while SE2 possesses second-order accuracy and does not show superconvergence. SE3 has an approximation order greater than or equal to three and uses the irregular Gauss-Lobatto collocation grid, whereas SE2 and o2o3 have a regular collocation grid; this constitutes an advantage for physical parameterizations and follow-up models, such as chemistry or solid-earth models. Furthermore, o2o3 has the technical simplicity of SE2. The common features (accuracy, convergence, and numerical dispersion relations) and differences between these schemes are described in detail for one-dimensional homogeneous advection tests. A two-dimensional test for cut cells indicates the suitability of o2o3 for realistic applications.
Some numerical atmospheric models use the classic Galerkin method or its variants to discretize the state variables of the atmospheric motion equations in basis functions. The global spectral method (Simmons et al. 1989) uses spherical harmonic basis functions, whereas the finite element (FE) method applies the classic Galerkin method in combination with local basis functions (Steppeler 1987). The advantages of the classic Galerkin FE method include the combination of a high approximation order (third or fourth order) with conservation properties and its suitability for irregular grid structures. Another advantage, namely, a sparse grid, is obtained when the Galerkin method is combined with higher than first-order FEs; in other words, some of the points in the regular grid are omitted, considerably reducing the computational time. For the FE method, such sparse grids are called serendipity grids (Ahlberg et al. 1967).
Classic Galerkin methods involve the solution of a linear equation related to the mass matrix. When the matrices are solved by direct methods, such as Gaussian elimination (Steppeler et al. 1990), they require global communication, although the basis functions are local and the mass matrix has a band structure. As classic FE methods require global communication between all cells within the computational domain, it is difficult to scale such models for very large numbers of processors. Accordingly, variants of the classic Galerkin procedure known as local Galerkin (LG) methods were developed (Steppeler and Klemp 2017). Particularly, spectral element (SE) techniques are LG methods that have undergone substantial development and are almost suitable for operational use (Herrington et al. 2019). SE methods have achieved scalability for the Nonhydrostatic Unified Model of the Atmosphere for up to millions of processors (Taylor et al. 1997; Giraldo 2001; Giraldo and Rosmond 2004; Kelly and Giraldo 2012). The present paper investigates a higher-order LG method referred to as o2o3, the full name of which is o2o3C0C1. The continuous basis functions for the field representation are piecewise quadratic polynomials in C0-space, while third-order differentiable basis functions in C1-space are used for the flux approximation. o2o3C0C1 is a further development of the o3o3C0C0 method (Steppeler et al. 2019a). Both o2o3 and o3o3 can be considered variants and generalizations of the SE technique. High-order SE methods use the irregular Gauss–Lobatto grid, possibly limiting the time step. Steppeler et al. (2019a) demonstrated that o3o3 inherits the advantages of SEs and allows a larger time step to improve the computational efficiency. Although the effective resolution of o3o3 as defined by Ullrich et al. (2018) is comparable with that of the third-order spectral element method (referred to as SE3), a dispersion analysis showed that o3o3 has a large 0-space. This means that waves are stationary for a relatively large range of wavenumbers.
Classic Galerkin approaches are widely applied in computational fluid dynamics, where irregular cells are used to correctly describe the surface of an airplane. In a meteorological context, this property may translate into an accurate representation of the lower surface, meaning a more accurate approximation of mountains. Additionally, FEs are expected to improve the impact of mountains on atmospheric circulation. For meteorological models, it is important for the lines composed of grid points to be horizontally aligned (Steppeler et al. 2006). Hence, these horizontal lines of grid points cut into the mountains. However, the lower boundary representation is complex, which hinders the use of this approach during the modeling process. Terrain-following coordinates enable the alignment of the grids with the surface topography, thereby simplifying the computation of the lower boundary condition (Phillips 1957). Horizontally aligned grids are normally constructed using a regular height grid structure where only the surface grid cells are irregular (Yamazaki and Satomura 2010). The horizontal alignment of numerical grids and the underlying terrain, such as that obtained with cut cells (Nishikawa and Satoh 2016), will result in a more accurate representation of mountains (Steppeler et al. 2006; Zängl 2012). Steppeler et al. (2019b) showed that cut cells provide a better representation of vertical velocities in a three-dimensional realistic model than the models using terrain-following coordinates, leading to improved forecasts. Consequently, cut-cell models were used with grid point numerical methods (Yamazaki et al. 2016; Steppeler et al. 2019b).
Steppeler and Klemp (2017) showed that some finite-difference (FD) cut-cell approximations can produce noisy solutions even for smooth mountains. Their work was limited to linear test functions and a rather simple test mountain consisting of a straight line. However, SE and FE methods are mostly performed on grids that are not horizontally aligned (Marras et al. 2016). The advantages of cut cells in representing mountains proposed by Steppeler and Klemp (2017) are not realized with these FE/SE representations. By contrast, Galerkin methods using first-order basis functions and horizontally aligned grids lead to solutions without such noise (Steppeler and Klemp 2017). This finding confirms the fact that Galerkin methods lead to accurate surface approximations when the cells are adapted to the surface, that is, for horizontally aligned cells. Nevertheless, existing atmospheric Galerkin models often do not take advantage of such suitability for good surface approximations because grids that are not horizontally aligned are typically used. A notable exception is the atmospheric model called Active Tracer High-resolution Atmospheric Model-Fluidity (ATHAM-Fluidity) that uses horizontally aligned cells and achieves good results in the generation of mountain-induced waves (Savre et al. 2016).
In this study, we construct o2o3 to address the disadvantages of o3o3, and we demonstrate the following properties of o2o3:
We describe the grid and approximation spaces for SE2, o2o3, and SE3 in Section 2. A summary of the numerical properties of all schemes compared in this paper is given in Table 1. Section 3 outlines the inhomogeneous FD schemes representing the approximations of these schemes. Section 4 presents the LG procedure for o2o3, conserving first-order moments. Section 5 illustrates the results of a homogeneous advection test to show the accuracy and stability, convergence and numerical dispersion relations of o2o3, and the study is concluded in Section 6.

In this study, the test problem involves homogeneous one-dimensional (1D) advection of the density field h(x):
 |
Equation (1) is solved using piecewise polynomial spaces of degrees 2 and 3. These are the discretization spaces used with the continuous Galerkin schemes o2o3, SE2, and SE3. Let a 1D domain Ω be divided into the elements Ωi (i = 0, 1, 2, …), where Ωi = (xi, xi+1). In each element Ωi, the polynomial Pi (x) =  is determined by three polynomial coefficients pi,0, pi,1, pi,2 for SE2 and by four coefficients pi,0, pi,1, pi,2, pi,3 for SE3. The index i indicates that the polynomial representation is applicable to the element Ωi. Hence, for a discontinuous second-order field representation, the polynomial coefficients pi,0, pi,1, and pi,2 are independently chosen and are the degrees of freedom. The spaces formed by pi,0, pi,1, pi,2, and pi,3 are used for third-order discontinuous and continuous field representations. For the continuous Galerkin scheme, the polynomials must fit together continuously, implying the condition Pi−1 (xi) = Pi (xi) and Pi (xi+1) = Pi+1 (xi+1). Therefore, we have only two degrees of freedom per element with SE2 and three for SE3.
is determined by three polynomial coefficients pi,0, pi,1, pi,2 for SE2 and by four coefficients pi,0, pi,1, pi,2, pi,3 for SE3. The index i indicates that the polynomial representation is applicable to the element Ωi. Hence, for a discontinuous second-order field representation, the polynomial coefficients pi,0, pi,1, and pi,2 are independently chosen and are the degrees of freedom. The spaces formed by pi,0, pi,1, pi,2, and pi,3 are used for third-order discontinuous and continuous field representations. For the continuous Galerkin scheme, the polynomials must fit together continuously, implying the condition Pi−1 (xi) = Pi (xi) and Pi (xi+1) = Pi+1 (xi+1). Therefore, we have only two degrees of freedom per element with SE2 and three for SE3.
In one dimension, the length of the element Ωi is defined as dxi = xi+1 − xi. If the grid distribution is regular, then dx = dxi. The boundary grid points xi and xi+1 of the element Ωi are called the principal points or corner points. For SE2, there are three independent amplitudes described by three collocation point values in each element, whereas there are four amplitudes for SE3 (Fig. 1). Collocation points are grid points within an element such that the amplitudes at these points are sufficient to determine the polynomial coefficients corresponding to this element. For SE2 and o2o3, the fields are quadratic polynomials within the element Ωi, and we need three collocation points Xi,0, Xi,1, and Xi,2. Although we have three collocation points per element, the dimension of the collocation grid space is twice as large as the number of elements, as principal points are shared by two elements. For a third-order field representation, such as with SE3 or the flux for o2o3, we need two interior points besides two principal points. Hence, the collocation grid points are Xi,j (i = 0, 1, 2, …, j = 0, 1, …, J) in Ωi:
 |
 |

Grids for o2o3, SE2, and SE3, in which the solid black points represent the principal nodes and the dashed white points represent the interior nodes of the elements.
The field values at collocation points form the grid point space. The points Xi, j must be used to derive the initial data for the three schemes.
The basis functions used to define the field h (x) in Eq. (1) are the same among the three schemes. The basis functions are defined in the interval (xmi − ½dxi, xmi + ½dxi) as follows:
 |
 .
.
For any field or flux q (x), we can derive the discretized representation using the basis functions defined in Eq. (4):
 |
Using Eq. (5), we can obtain the transformation equations to the grid point space at the midpoints xi+1/2 for SE2 and o2o3 with ε = 0:
 |
 |
For the third-order space used in SE3, we refer to Steppeler et al. (2019a) for the formulas of the transformation between the grid point space and spectral space. A list of published LG schemes and their discretization spaces is given in Table 1.
We note that o2o3 for the two-dimensional (2D) problem is obtained by differencing along the coordinate lines, analogous to the 2D o3o3 scheme derived in Steppeler et al. (2019a). Thus, the 1D scheme is extracted while leaving the interior points out. Hence, the 2D grid becomes sparse for interior points that are not used for forecasting. This means that the sparse grid is obtained from the full grid (all points are dynamic) by removing the interior points, as illustrated in Fig. 2. Thus, only the grid points at the corners and edges are dynamic. Steppeler et al. (2019a) defined the sparseness factor as the ratio of the number of dynamic points to the number of points in the full grid. A small sparseness factor indicates the potential for reducing the computational time.

o2o3 computational grid in two dimensions: (a) full grid and (b) sparse grid where unused points are shown in white.
The classic fourth-order FD scheme (o4) is a homogeneous FD scheme that uses the same FD formula at each grid point. By contrast, SE and other LG schemes typically use different discretization equations at each collocation point (Steppeler et al. 2019a); these approaches are known as an inhomogeneous FD scheme. In this section, we discuss inhomogeneous FD schemes resulting in the temporal derivatives of the field q (x) for a regular grid distribution dxi = dx.
SE2, o2o3, and SE3 are used as examples for comparison. For all three examples, q (x) within the cells is approximated by polynomials. For any of the collocation points, these polynomials are not centered around the target point (the point to compute the derivatives). Instead, to obtain the spatial derivative of q (x) in a cell, the polynomial is differentiated at different collocation points. We note that the right and left derivatives (q+x, i and q−x, i) at the principal points are defined discontinuously between two different cells; hence, an averaging procedure for q+x,i and q−x,i must be defined to obtain qx,i. Thus, the FD schemes in a cell differ among the collocation points, and consequently, the three schemes are inhomogeneous in the grid point space. In the following paragraphs, we introduce three schemes for both principal and interior points except that o2o3 for the interior points will be defined in the next section.
For SE2, the time derivative in Eq. (1) at the collocation points can be computed using the field representation Eq. (5) with ε = 0. For the interior points in Ωi, the functional representation in Eq. (5) is differentiable, and we can obtain the following:
 |
For the principal points xi in Ωi, the basis function in Eq. (4) has a discontinuous derivative, and we obtain the right and left derivatives, q+x,i and q−x,i at xi from Eq. (5). These values are obtained as follows:
 |
If the derivative at a principal node is defined as the average of these two values, we can write qt,i as follows:
 |
o2o3 may be viewed as a generalization of SE2 with constructed inherent superconvergence to an order of at least three. Thus, o2o3 will be introduced as an inhomogeneous FD scheme. For the principal grid points in Ωi, any FD scheme of at least the third order may be chosen. Here, we choose the classic o4 scheme:
 |
Equation (11) guarantees fourth-order accuracy at corner points on regular grids (Durran 2010). However, for irregular grids, the accuracy drops to the first order. Now, we list the formula for calculating qt on an irregular grid. When we apply Eq. (11) for all points, the rather strong deviation from conservation occurs partly because of a decrease in the order of approximation to 1. This decrease in the order of approximation is then counteracted by smoothly changing the resolution. Grid smoothing methods, such as “spring dynamics” (Tomita et al. 2001), are applied, whereas the Voronoi type of smoothed grid is used for the Model for Prediction Across Scales (Skamarock et al. 2012). For irregular grid structures, an alternative generalized formulation of Eq. (11) is derived as follows (Steppeler et al. 2008):
 |

For comparison purposes, we also use SE3. For the principal nodes in SE3, averaging between right and left values, as performed in Eq. (10), is adapted to the third-order representation. For the two interior nodes, Eq. (8) is used analogously because the basis function representation for SE3 is directly differentiated.
Finally, the proof of the third-order approximation of Eq. (11) follows from the requirement of third-order consistency. The FD equation for mass follows directly from Eq. (5). Let dmi be the mass contained in the element Ωi = (xi, xi+1):
 |
 |
In this section, with the field representation defined in Section 2, we introduce the LG procedure to define o2o3 in comparison with SE2 and SE3.
We assume h (x) to be represented in the grid point space by hi, and we assume that h (x) can be transformed into the spectral space by Eq. (7). This will result in the spectral amplitudes hi and hxx,i+1/2 for SE2 and o2o3 and the spectral amplitudes hi, hxx,i+1/2 and hxxx,i+1/2 for SE3 in Ωi. Using these amplitudes, Eq. (5) gives the functional form of h (x).
For SE2 and SE3, fl (x) = −u0h(x) can be defined using the representations in Eqs. (5) and (7). For SE2, we have the following:
 |
For SE3, we refer to Eqs. (5) and (7) analogously:
 |
To define o2o3, the temporal derivative of the field is proportional to the spatial derivative according to Eq. (1), which means that we only need to determine the expressions of ht,i = flx,i at the principal nodes and of flxx,i+1/2 and flxxx,i+1/2 at the interior nodes within Ωi. However, in o2o3, the field h (x) given by Eq. (5) has only a second-order representation. Thus, we apply Eq. (5) with ε = 1 to define a third-order representation of the flux fl (x).
At the principal nodes in Ωi with o2o3, we again define the following:
 |
 |
 |
At the interior points within the element Ωi, the values of flxx,i+1/2 and flxxx,i+1/2 follow the continuity requirement of the functional representation in Eq. (11) at the principal nodes [see the details of the steps to derive the time derivative of h (x) in Fig. 3]. We provide two methods to obtain the expressions of flxx,i+1/2 and flxxx,i+1/2.

Approximations of the flux and the flux derivative of the field h(x) by the (a) SE2, (b) o2o3. and (c) SE3 schemes. The solid curves are the field h(x), and the dashed curves are the flux. The dotted curves represent the derivative of the flux, whereas the blue curves represent the regularized derivative, which is the derivative approximated by a continuous function. The regularized derivative is applied with SE2 and SE3. The grid intervals are shown corresponding to the dotted curves, where the long vertical lines represent the principal points and the short vertical lines are the interior points. In (a) and (c), the flux is different from h(x) only by the factor −1. In (b), the flux fl(x) is approximated by a differentiable function, and the flux derivative does not need to be regularized, as fl(x) is differentiable. In (c), h(x) is a third-order representation.
In the first method, the equations for the spectral coefficients flxx,i+1/2 and flxxx,i+1/2 are obtained by taking the x-derivative of Eq. (5):
 |
Equation (20) is an equation for flxx,i+1/2 and flxxx,i+1/2, as all other quantities are known. The derivatives of e+i+1, ei−, bi2 bi3 are obtained from their definitions in Eq. (4). Using Eqs. (4), (5) and (20), we can derive the expressions for the spectral amplitudes at the interior points xi+1/2:
 |
 |
For the time derivative at the interior point of an element, according to b3x,i(xi+1/2) = −1/24dx2 and Eqs. (4), (5), (21), and (22), we can obtain the following:
 |
In the second method, we directly apply the principle of the conservation of mass to construct Eq. (23). Let the time derivative of h at the principal nodes be given again by Eq. (19) or by any other difference scheme of at least the third order. By differentiating Eq. (14) with respect to t, the time derivative of the mass dmt,i in the element Ωi is obtained as follows:
 |
 |
Figure 3 illustrates the steps for the computation of the time derivative of the field h. The field is defined as h (xi) = 0, except for h (x500) = 4. This defines a rather small-scale field for which different numerical methods are expected to give different results. For smooth fields, all methods must give very similar results. Figure. 3a shows the results with SE2. The flux in this case that is shown as the dashed curve is merely the negative of the field. However, the spatial derivative of the flux shown by the dotted line, is discontinuous. The blue curve is the result of the LG operation that approximates the derivative by a continuous function. Figure 3b shows similar results for o2o3. The flux shown by the dashed curve is approximated by a differentiable function, and the spatial derivative of the flux shown by the dotted curve is continuous; thus, no further approximation is necessary. Figure 3c gives the result for SE3, which is analogous to the result shown in Fig. 3a, but with the approximating polynomial of degree 3. We note that the grid is different from that of SE2 because its length is 3dx
For all of the described methods, when the time derivative ht(x) is given in the grid point space, the fourth-order Runge–Kutta method (RK4) can be applied as with any other FD scheme. Although the example of Fig. 3 uses a low resolution, all methods give a reasonable approximation of the time derivative. This is important, since practical calculations in meteorology depend on reasonable approximations with poor resolution in some instances (Steppeler et al. 2003), and the orography is often not well-resolved in atmospheric models.
Thus far, we have already illustrated how to generate the inhomogeneous o2o3 scheme for ht,i and ht,i+1/2 using the homogeneous 1D advection equation Eq. (1). Overall, the steps of the implementation of o2o3 are described as follows:
Note that the time loop consists of Steps 3, 4, and 5. Steps 1 and 2 are used to initialize the forecast.
To investigate the characteristics of o2o3, including its accuracy, convergence, numerical dispersion and stability, homogeneous advection tests in both one and two dimensions are implemented. For a first examination of the suitability of o2o3 for high-order cut-cell modelling, an advection test along a straight mountain is implemented.
5.1 1D homogeneous advection testThe advection equation in Eq. (1) is solved for a 1D area with 600 points, and the constant-velocity field u0 is set to be u0 = 1.0. For o2o3 and SE2, 300 elements are present in the area, whereas for SE3, 200 elements are present.
With an element length dx = 2 for o2o3 and SE2, the resolution of the collocation grid is dxr = 1. Table 3 shows the Courant–Friedrichs–Lewy (CFL) condition with RK4 time-stepping. The available time steps (i.e., CFL condition) are 2.2, 1.8, and 1.5 for SE2, o2o3, and SE3, respectively. According to conventional wisdom (Durran 2010), classic o4 has a stability limit of 1.9 with the RK4 scheme. This means that o2o3 has a marginally smaller CFL condition than the classic o4 scheme. The relatively weak CFL condition with SE3 can be explained by the minimum grid size of the Gauss–Lobatto grid being lower than that of the equally spaced grid used with o2o3. Thus, the time step in o2o3 is approximately 20 % higher than that in SE3. However, these two schemes are comparable in terms of their accuracy and conservation properties. The large CFL number of SE2 is to be expected, given that the transition to a higher order often requires a smaller time step. Ultimately, the CFL conditions for o2o3, SE2, and SE3 are more severe than those for the second-order centered FD scheme.

To measure stability, we perform temporal integration for a long time. We use 30000/dt steps, meaning that the structure is transported over 30000 grid points or 15000 elements over the area. Because of the periodic boundary conditions, for t = 600 n (n = 1, 2, 3, …), the analytic solution of Eq. (1) is identical to the initial value, so that the accuracy can easily be checked at these times.
Figure 4 shows the solutions of the homogeneous advection test after transport over 300dx and 30000dx. The initial value of h(x) is defined as follows:
 |

Solutions of the homogeneous advection equation with periodic boundary conditions after transport over 300dx and 30000dx, and the length of the horizontal area is 600dx. The initial condition centered at 150dx is shown in (a). The second row shows the results after transport over 300dx, whereas the third row shows the results after transport over 30000dx. The left, middle, and right columns are the results with SE2, o2o3 and SE3, respectively. Because of dx = dt = 1, the transport of 30000dx is done in 30000dt. This value of dt means that all schemes perform well in their CFL limit.
For the regular resolution case and periodic boundary conditions, both classic o4 and o2o3 are conserving. However, a lack of conservation will be observed only for o4 on irregular grids in practical tests. Hence, an irregular resolution is introduced:
 |

Solution of a single cell peak for the (a) classic o4 scheme with a regular cell structure, (b) weighted o4 scheme with an irregular cell structure, (c) o2o3 scheme with a regular cell structure, and (d) o2o3 scheme with an irregular cell structure. The black curves are the initial field and the forecasts at t = 100, 200, 300, and 400, and the red and blue curves are the forecasts at t = 30 and t = 60 at the start and end of the resolution jumps.
Mass diagrams of the solutions, defined as ∫Ωh (x) dx, are shown in Fig. 6. The formula for computing the mass is given in Eq. (13). o2o3 conserves the mass down to the round-off error, whereas o4 conserves the mass until the resolution jump is reached. Then, the deviation from conservation is rather strong (reaching 50 %) and diminishes for advection in the coarseresolution area.

Mass diagrams for the (a) classic o4 scheme with a regular cell structure, (b) weighted o4 scheme with an irregular cell structure, (c) o2o3 scheme with a regular cell structure, and (d) o2o3 scheme with an irregular cell structure. With the nonconserving o4 scheme, deviations of mass conservation occur when the advected structure reaches the lower-resolution area and to a smaller degree when the highly resolved area is reached again.
This section investigates the approximation order of the schemes considered in this paper. Because a general function can be approximated by a Fourier transformation of the sum of trigonometric functions, we investigate the accuracy of the approximation of the derivative of a cosine function g(x) that can be expressed as follows:
 |
We assume a grid distribution as follows:
 |
 |
Figure 7 shows the numerical errors of its spatial derivative with dx = ⅛, ¼, ½, 1, 2, 4, 8, 16, 32, and 64. The classic o4 scheme converges to the fourth order only on regular grids. For comparison, the result for SE2 on regular grids is shown to exhibit second-order convergence, meaning that there is no superconvergence for SE2. By contrast, the high-order flux computations with o2o3 lead to superconvergence.
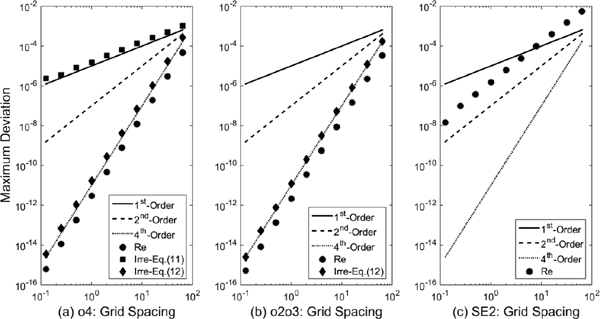
Convergence speeds of o4, o2o3, and SE2 under irregular and regular grids for different grid spacings: dx = ⅛, ¼, ½, 1, 2, 4, 8, 16, 32, and 64. The left, middle and right panels are the results for o4, o2o3 and SE2, respectively. The circles represent the error norms for a regular grid, where Eq. (11) is used for o4 and o2o3, whereas the squares represent the error norms for an irregular grid, where Eq. (11) is used for o4, and the rhombuses are the error norms for an irregular grid, where Eq. (12) is used for o4 and o2o3. The squares in the left panel are used for classic o4 according to Eq. (11), leading to a first-order scheme on an irregular grid.
Next, the convergence on an irregular grid is investigated. The grid is defined in Eq. (29) where δ = 1.0. o2o3 converges to the fourth order with an irregular grid. The use of weighted o4 to compute the differences on principal grids is essential. Conversely, the classic o4 scheme is reduced to the first order for the irregular grid.
5.3 Dispersion analysis of o2o3To derive the numerical dispersion relation for o2o3, we use spectral solutions following Ullrich et al. (2018). The field h is assumed to be as follows:
 |
 and c and k are the phase velocity and nondimensional wavenumber, respectively. Then, we define the amplitudes
and c and k are the phase velocity and nondimensional wavenumber, respectively. Then, we define the amplitudes  in the spectral space. For each k, the linear relation between
in the spectral space. For each k, the linear relation between  and
and  for Eq. (1) is given by the following:
for Eq. (1) is given by the following:
 |
 is the temporal derivative of
is the temporal derivative of  and the matrix Mk depends on the wavenumber k. The exact solution should be linearly dependent on k due to the following:
and the matrix Mk depends on the wavenumber k. The exact solution should be linearly dependent on k due to the following:
 |
We assume that ak1 and ak2 are defined as the eigen-values of the matrix Mk. Thus, the imaginary components of ak1 and ak2 represent the frequency ω(k) of the wavenumber k, whereas the real components are the diffusivity. The phase velocity of the wavenumber k becomes  .
.
The evolution matrix Mk is given by the following:
 |
 and
and  . The matrices M1, M2, M3, M4 are 2 × 2 matrices that are given by the following:
. The matrices M1, M2, M3, M4 are 2 × 2 matrices that are given by the following:
 |
 |
 |
 |
For o2o3, Figs. 8a and 8b show the phase velocity and the deviation of the amplification factor from unity, respectively, as functions of the nondimensional wavenumber. For comparison, the corresponding results for SE3 and o3o3 are also given. In Fig. 8a, we focus on the maximum of the frequency curve because the corresponding wavelength is the resolution limit for each scheme. For o2o3 and SE3, the approximated phase velocities are accurate for wavelengths greater than 3dx, with o3o3 performing somewhat worse. For smaller wavelengths, the derivative of the frequency curve becomes negative, resulting in a negative group velocity. This means that for this range of wave-numbers, the solution is not useful in terms of the propagation of wave packets. Based on this criterion, the useful wavelength range for o2o3 is larger than that for o3o3 by approximately dx. Finally, as shown in Fig. 8b, the amplification factor is one for all three schemes, and thus, the schemes are all nondiffusive.

Dispersion relations for o2o3, SE3, and o3o3. (a) is the imaginary part and (b) is the deviation of the eigenvalues from one, which is a measure of the intrinsic diffusivity of the scheme. All three schemes are non-diffusive. The black circles mark the spectral gap for SE3, producing negative group velocities in an area where the neighboring wavenumber values indicate a well-resolved solution.
The part of the spectrum with negative group velocities should be filtered. Sometimes, a more elaborate definition of the essential resolution is used (Ullrich 2014). This is based on the realistically approximated part of the dispersion diagram that shows the frequency as a function of the wavenumber. We note that o2o3 does not have the large 0-space of o3o3. The 0-space is a space where waves are stationary for a relatively large number of wavenumber values. For o3o3, there exists a 0-space with wavenumber values where physical waves are not captured (Steppeler et al. 2019a). Therefore, o2o3 is simpler to execute than o3o3.
Although SE3 has a marginally larger useful wave-length range than o2o3, we note that the dispersion relation for SE3 shows a spectral gap, as indicated by black circles in Fig. 8a. A spectral gap is a small wiggle on the frequency curve leading to a small area of negative group velocities in an otherwise well-resolved k-area located around the wavelength 8dx in Fig. 8a. Because of this spectral gap of SE3, Steppeler et al. (2019a) concluded that o3o3 has performance advantages over SE3. By contrast, o2o3 and o3o3 do not have spectral gaps. The methods for reducing the effect of the spectral gap for SE3 by applying hyperdiffusion have been discussed in the literature (Ullrich et al. 2018). In the absence of a spectral gap, an estimate of the usefully resolved wavenumber k is the range of k up to the maximum.
5.4 Von Neumann stability analysis of o2o3 for finite dtIn this section, the 1D advection equation in Eq. (1) is used for the classic Von Neumann stability analysis of o2o3. The waveform solution Eq. (31) of the field h and the linear relation Eq. (32) between  and
and  are utilized for this analysis.
are utilized for this analysis.
For RK4 time integration, the amplification factor G is given by the following:
 |
 |

(a) Von Neumann analysis results for o2o3. (b) is the cross-section of (a) at the nondimensional wavenumber k = π.
As stated in Section 2, o2o3 can be easily adapted for 2D advection over simple terrain. This method is completely analogous to the method in Steppeler et al. (2019a) and can be considered a generalization of the o1o1 scheme treated by Steppeler and Klemp (2017). For details regarding the calculation, the readers are referred to Steppeler et al. (2019a). Here, we give only a short description.
Following Steppeler and Klemp (2017), we conduct a 2D advection test along the profile of a mountain composed of a straight line oriented at an angle of 45°. This test problem is very simple; we assume that the velocity is parallel to this straight line, and the velocity components (u0 and w0) are constant (1, 1). Despite the extreme simplicity of this example, Steppeler and Klemp (2017) showed that noise can be generated along the orographic line. We can examine how this kind of noise can be avoided.
Figure 10 shows that the sparse grid is available in the same manner as for o3o3. However, there is a difference in the sparseness factor between o2o3 and o3o3. The sparseness factor is the ratio of the number of grid points in the sparse grid to that in the full grid. According to Steppeler et al. (2019a), o3o3 has a sparseness factor of 5/9, whereas o2o3 has a sparseness factor of ¾ (as illustrated in Fig. 2). Comparing the result of Fig. 10 with that of Steppeler et al. (2019a) with a sparse grid, we find that o2o3 has fewer unused points than o3o3. However, discussing this finding in terms of practical modeling and numerical computation reduction is beyond the scope of this paper.

Two-dimensional results of o2o3 with a cut-cell grid under a straight line representing the terrain. The tracer in the first row is above the terrain, whereas the tracer in the second row is advected along the terrain. The first column presents the initial values of the tracers and the advection results after 100 time steps. The second column shows magnified views of the field at the locations of the initial values. The third column shows magnified views of the forecast fields. (b) and (e) show a background comprising zero field values with clusters of higher values. These points are marked in white in Fig. 2b; as these points are unused for forecasting, they retain their initial values. (c) and (f) show a smooth structure representing the field. At some points corresponding to the points marked in white in Fig. 2b, there is a steep point valley assuming the value of 0. The contour interval is set to be 0.5.
We define the fluxes in the x- and z-directions as follows:
 |
 |
For uncut cells, this procedure is straightforward and analogous to o3o3. For the cut cells, a coordinate along the surface line is introduced. For this specific test problem, the streamlines of advection are parallel to the surface line x = z such that there is no flux and no flux divergence in the direction perpendicular to the surface. Because the orography is diagonal to the model area, the principal points lie on the orographic line that can be treated by classic o4. No interpolation is necessary for orography to cut the cells diagonally.
To this line x = z, we assume a coordinate s in the diagonal line with  . Therefore, Eq. (42) for s-axis takes the following form:
. Therefore, Eq. (42) for s-axis takes the following form:
 |
 because the flux is in the direction of the diagonal line. Additionally, the time derivatives for the principal points on the boundary are obtained by differentiating along the diagonal boundary. Instead of rectangles, cut-cell grids can be applied for rhombohedral grids, resulting in quadrilaterals with two angles not equal to
because the flux is in the direction of the diagonal line. Additionally, the time derivatives for the principal points on the boundary are obtained by differentiating along the diagonal boundary. Instead of rectangles, cut-cell grids can be applied for rhombohedral grids, resulting in quadrilaterals with two angles not equal to  . This will complicate the computation of mass contributions by the different amplitudes relative to the rectangular grid case used here. However, in more general cases, the principle of mass conservation is used in the same manner as with squares to determine the amplitudes of the time derivatives at the midpoints of the edges.
. This will complicate the computation of mass contributions by the different amplitudes relative to the rectangular grid case used here. However, in more general cases, the principle of mass conservation is used in the same manner as with squares to determine the amplitudes of the time derivatives at the midpoints of the edges.
For the experimental setup, we use a square grid of 140 × 140 grid points with dx = dz = 1.0, and we perform temporal integration for 100 time steps with dt = 1.0. The results for o2o3 are shown in Fig. 10 and can be compared directly with those by Steppler and Klemp (2017). The inaccuracies and noise for this problem, as seen for some non-Galerkin treatments, are absent; o2o3 is able to advect a structure along a straight line without generating noise. This result is consistent with that for the first-order Galerkin approach and with that obtained by Savre et al. (2016), who reported fewer numerical boundary-related errors for the classic Galerkin method. These results indicate that cut cells may be applicable with polynomial representations higher than 1.
The cut-cell example shown above is a rather special case because it is valid only when the orography passes through the diagonal of cells. The more general case where the orography is any straight line can be treated with only little more effort. The computational domain comprises the points above the orography. As the orography is a straight line of direction (u0, u0), we define the flux as (u0h, u0h) where h is the density. This means that the flux has no component perpendicular to the orography at each point on the orography. We call this the pointwise boundary scheme. Another option not followed in this paper would be to use the less stringent condition that the integrals of the vertical flux components over segments of the orographic line are 0.
The orography is shown as a red line in Fig. 11a and as a green line in Fig. 11b. The diagonal computational domain above the red line (gray area in Fig. 11a) is notated as Sd whereas the nondiagonal domain above the green line (gray area in Fig. 11b) is correspondingly notated as Snd. Near the nondiagonal boundary, we have cells with triangles or pentagons marked in green, while the cells are squares and triangles at the diagonal boundary in red. There is more than one way to define the field representations near the small boundary sections in triangles/pentagons, and we are seeking the simplest scheme. Note that a polynomial function defined in a part of a rectangular cell, such as the small cut-cell triangles/pentagons in Fig. 11b, can be uniquely extended to the whole cell. Therefore, it is possible to define fields in the area Snd by adopting the same discretization (such as Eq. 43) in the larger area Sd and restrict the field values in Snd. Therefore, we can further define the temporal scheme in Snd to be the same as that in Sd because Sd and Snd share the common area Snd.

Different options for the cut-cell grid. (a) Special case of a straight orographic line going through the cell corners, as was used in the example of Fig. 10. All cut cells in this case are triangular marked with red colors. (b) A general case where the orography does not cut each cell diagonally. The thick solid and green lines mark the boundary approximation cells. The cut cells are triangles or pentagons shown in green. The physical domains are the gray areas marked with Sd in (a) and Snd in (b). The mass of the system is the integral of the density over the area above the orography. The polynomial field representations for the fluxes and the density can be uniquely extended to the whole area of the boundary approximation cells.
Let us assume the mass MS for the area S:
 |
 |
The case of cut cells with a curved boundary is beyond the scope of this paper. The derivations of Eqs. (44) and (45) use the pointwise cancellation of the flux at the boundary, which follows from the assumption of a constant velocity. However, the extension of fields and fluxes beyond the small triangles and pentagons can also be useful for a more general orography. When the orography is not a straight line but rather a linear spline and the x-component of the flux is represented as a piecewise continuous polynomial spline, the z-component of the flux vector must have a discontinuous representation. It follows from that fact that a curved piecewise linear spline for the orography changes direction at the corner points in a discontinuous manner. Thus, the function obtained by differentiation would be treated as a discontinuous function. Second-order staggered Arakawa C-grid schemes can be obtained as low-order LG schemes by a discontinuous piecewise linear 2D spline (Steppeler 1989). This is achieved by assuming constant piecewise fields for the density and representing the velocity components u and w as piecewise linear splines. Specifically, u is set to be continuous and piecewise linear in the x-direction and piecewise constant in the z-direction. w is represented in a similar manner by swapping the treatment to u in the x- and z-directions. The generalization to orographic surfaces represented by linear splines can be accomplished by generalizing the low-order Galerkin representation of Steppeler (1989) to a higher polynomial order.
This study has investigated an alternative LG method referred to as o2o3. This method represents the field h by piecewise quadratic polynomials and the fluxes by degree-3 polynomials. o2o3 inherits not only the accuracy of SE3 but also the geometric flexibility of FE methods and the potentially strong scalability of SE techniques. Furthermore, o2o3 uses a regular collocation grid and allows a larger time step than SE3. The allowed time step is the same as that of standard fourth-order differencing. The transition to the LG approach is an advance compared with conventional fourth-order differencing, as the proposed method is mass conserving, and a conservation law may be achieved for each equation used in a multi-equation system.
No author reported any potential conflicts of interest. This research was made possible by a research visit of all authors in Bad Orb, Germany, financed by the National Natural Science Foundation of China (Grant No. 41905093), the China Scholarship Council (No. 201904910136), and the UK EPSRC Project (MAGIC, Grant No. EP/N010221/1). The authors thank the city of Bad Orb for the support of the visit by providing office space. To discuss these results, the workshop of Mathematics of the Weather 2019, 14–16 October in Bad Orb, was organized by the first author in cooperation with the Freie Universität Berlin and Imperial College London. The conference was supported by the German Research Council (DFG, Grant No. KL 611/26-1) and the Hessian Ministerium für Wissenschaft und Kunst.