Mini reviews
[title in Japanese]
2019 Volume 2019 Issue 1 Pages 19-25
Details
2019 Volume 2019 Issue 1 Pages 19-25
北海道において急速に普及しつつあるトラクタの自動操舵技術が,オペレータの負担軽減,作業精度の向上効果に及ぼす影響を調査し,それらが農作業に及ぼす影響について検討した.また,北海道における可変施肥技術の開発状況を概説した.オペレータの精神的な負担の指標となる唾液中のアミラーゼ活性は,ダイズの中耕作業において自動操舵を利用することによる低下が認められ,長時間の作業におけるオペレータの負担軽減に寄与していると考えられた.また,自動操舵の利用による作業精度の向上は,播種作業では設定どおりの栽植密度を可能にし,整地作業では作業工程を減らす効果が認められた.可変施肥技術は,追肥に用いられるセンサベースの可変追肥が導入された。これに加え,過去に実施した可変施肥の結果や,センシングにより土壌肥沃度の圃場内のむらを把握して施肥マップを作成し,基肥の可変施肥が検討されている.
北海道の道東地域では,コムギ,バレイショ,テンサイ,マメ類の畑作 4 品目(オホーツク海側の一部ではマメ類を除く 3 品目)と野菜類を含めた輪作体系が行われている.これらの畑作を経営する販売農家は今後減少することが予想されており,販売農家 1 戸当たり平均経営耕地面積は,2030 年には十勝で 47.6 ha(2015 年比 127%),オホーツクで 40.1 a(同 131%)に拡大すると予測されている(三宅 2018).輪作作物のうちのテンサイやバレイショは労働負担が大きく,テンサイ生産者を対象とした白井ら(2016)の意向調査では作付面積は現状維持とする回答が多い.これは,1 戸当たりの経営規模が拡大する中で,生産者はテンサイの作付割合は減らす意向であることを示している.これらの状況で,輪作を維持するには省力化と労働負担の軽減が求められる.また,山田(2013)はテンサイの作付面積の割合を高く保つには,省力技術の導入とともに単収を高め生産意欲を高める必要があることを指摘している.
われわれは,2014 年から「攻めの農林水産業の実現に向けた革新的技術緊急展開事業」(うち産学の英知を結集した革新的な技術体系の確立)(2014 年度から 2015 年度),「革新的技術開発・緊急展開事業」(うち経営体強化プロジェクト)(2016 年度),「革新的技術開発・緊急展開事業」(うち経営体強化プロジェクト)(2017 年度から 2019 年度)に取り組んでいる。これは,寒地畑作を対象とした ICT の活用をテーマに,道内外の研究機関,機械メーカー,地域の農協等からなるコンソーシアムにより,1 戸あたりの経営耕地面積が今後も増える中で,輪作を維持するために,手間のかかる根菜類を中心とした生産支援や効率的な生産技術を構築しようとするものである.この中で,自動操舵の導入による労働負担の軽減や,可変施肥技術による施肥量の削減や,単収の増加などに取り組んできた.
本稿では,前述した事業の成果を中心に,北海道内で普及が進む自動操舵と,可変施肥技術に関する研究成果を紹介する.
1)自動操舵の普及状況と生産者の期待
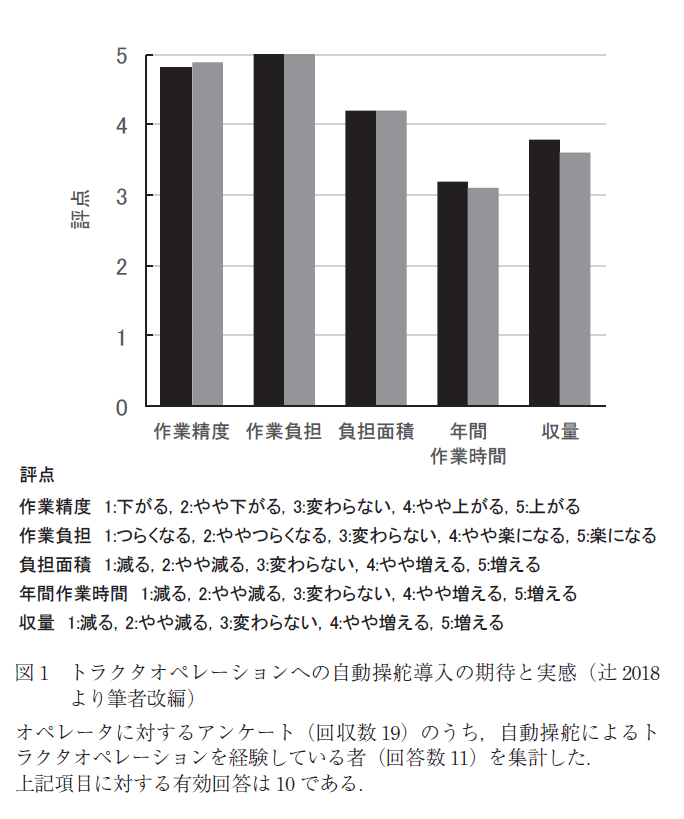
北海道では,GNSS(全地球測位システム)を用いたガイダンスシステムのトラクタオペレーションへの導入が早くから検討され(井上ら 2012),自動操舵の導入も都府県に先駆けて進んできた.2016 年度の自動操舵装置の北海道向けの出荷台数は,1,220 台で,2008 年度度以降の累計出荷台数は 2,800 台を超えており,この間の全国出荷台数の 94%が北海道向けとなっている(大塚 2017).辻(2018)は自動操舵技術を導入した十勝地域の11名のオペレータにアンケートを実施し,自動操舵技術導入時の生産者の期待と導入後の実感について調査した.オペレータの期待は,作業精度の向上と作業負担の軽減でともに大きく,導入後に実感した効果も同程度に高かった(図 1).また,自動操舵技術は一人当たりの負担面積の増加に対応する技術としての期待と評価が高く,経営面積の拡大に対応する技術として導入されていることがうかがえる(図 1).
2)自動操舵技術による作業負担の軽減効果
以上のように,自動操舵の導入はトラクタオペレータの負担軽減に効果があると考えられているが,実際の作業において労働負担の軽減効果を検証した例はほとんど無い.そこで,ダイズの中耕除草作業中のオペレータの負担を,心拍数と唾液アミラーゼ活性を指標として調査した(辻,西脇 2018).唾液アミラーゼ活性は交感神経の指標として利用され(山口ら 2001,中野,山口 2011),心理的なストレスの高まりを客観的に評価する指標であり(萩野谷,佐伯 2012),農作業時の精神的負荷の評価にも用いられている(小泉, 深山 2013).本試験は,農研機構・北海道農業研究センターの「人を対象とする研究に関する倫理審査」において事前に承認を受け,インフォームドコンセントを得た 5 名のオペレータを対象に,表 1 に示した試験条件で自動操舵を使用した条件(自動操舵区)と使用しない手動操作(手動操作区)で中耕作業を約 1 時間行い,その際の唾液アミラーゼ活性等の作業負担を調査したものである.

試験の結果,身体的な負担の指標値であるオペレータの心拍数は,作業時とその前後の差が小さく,自動操舵区と手動操作区の心拍数には有意差は認められなかった(データ不掲載).一方,唾液アミラーゼ活性は,ダイズ中耕作業の開始直前に上昇を示した.唾液アミラーゼ活性の値には大きな個人差が認められたが,それぞれのオペレータの唾液アミラーゼ活性は手動操作区に比べて自動操舵区でほぼ一貫して低かった.特に,作業を 1 往復,3 往復,5 往復終了した後の唾液アミラーゼ活性は手動操作区に比べて自動操舵区で危険確率 5%以下の有意な低下が認められた(図 2).以上の結果から,トラクタ作業に自動操舵を使うことで精神的な負担が緩和されていることが明らかになった.

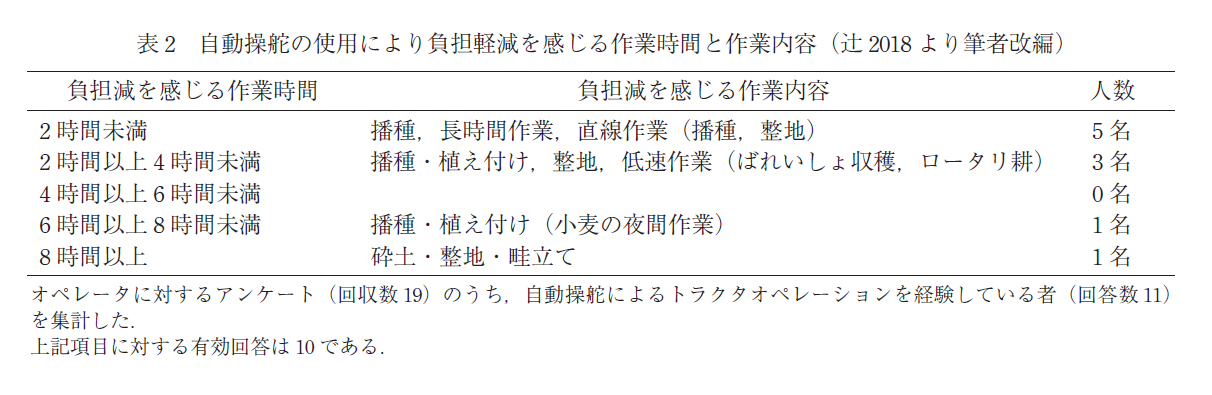
辻(2018)が行った,オペレータに対するアンケート調査では,自動操舵の使用により労働負担の軽減を実感する作業継続時間を調査しており,8 割のオペレータは 1 時間以上 4 時間未満の作業で負担の軽減を実感すると回答していた(表 2).北海道の畑作においては,4 月下旬から 5 月上旬に,耕起,整地やテンサイやバレイショの播種等の作業時期が重なり,これらの作業を半日以上続けることは多い.自動操舵によるオペレーションのアシストは,繁忙期のトラクタオペレータの作業時の負担と疲労を軽減し,その結果,長時間あるいは長期間の作業が可能になることで,オペレータの一人当たり負担面積が増えていると考えられる.
3) 自動操舵による作業精度の向上事例と効果
自動操舵技術導入時の生産者の期待は,作業精度の向上面でも大きかった(表 1).図 3 にはテンサイの播種作業(面積 3.53 ha,平均作業速度 4.0 km/h)における隣接する行程とのずれ(クロストラッキングエラー)の発生状況を示した.オペレータによる手動操作区におけるクロストラッキングエラーは 14.9 cm であったのに対し,自動操舵区では 1.6 cm であった.また,播種作業時に,隣接する行程の間の条の間隔を調査し,機械作業幅と実際の作業幅のずれを調査したところ(表 3),オペレータによる手動操作の播種作業では,隣接する行程間の条の間隔は設定された条間に比べて 1 行程当たり約 0.07 m から 0.09 m 大きく,作業幅は機械の設定に比べて大きくとられていた(表 3).これに対して,自動操舵を使用した場合は,隣接する行程の間の条の間隔は,設定条間の距離とおおむね同等であり,自動操舵を使用した作業精度が高いことが明らかになった.

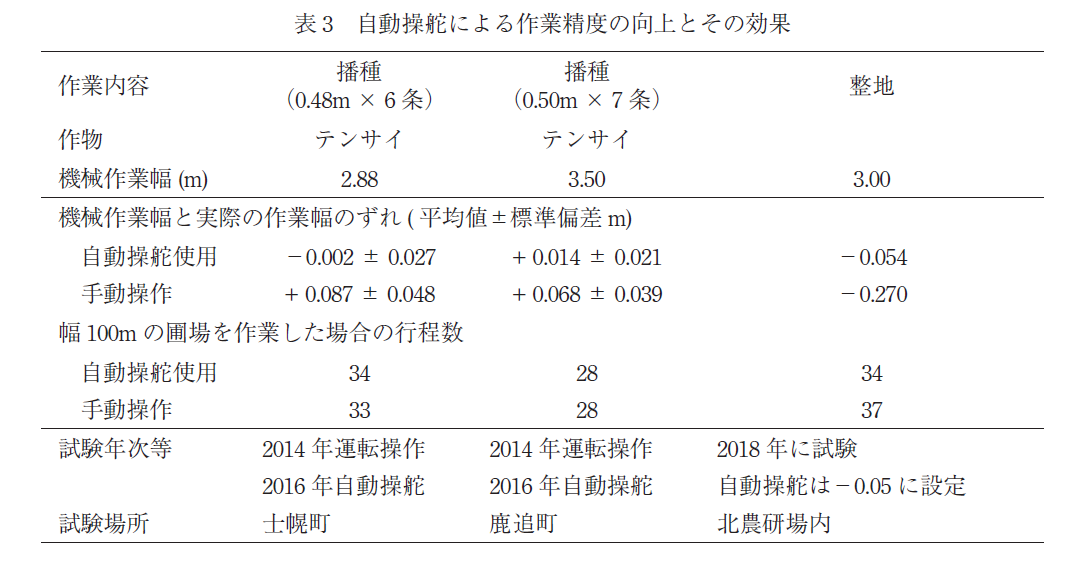
播種作業において隣接行程とのずれが蓄積されると,実際の作業の行程数は設定に比べて少なくなり,作物の個体密度は設定に比べて減ることになる.自動操舵を使用した農作業は,正確な作業間隔を保つことができるため,設定どおりの播種作業を行うことができる.
一方,ハローを用いた砕土・整地作業では,作業間隔は機械の作業幅よりも小さくなった(表 3).これは,オペレータが掛け残しを避けようと判断し,わざと一定幅で重複した作業を行おうとするためである.自動操舵を使用した作業では,作業間隔をあらかじめ設定できるため,運転操作に比べて重複する幅を小さくすることができた.このため,砕土・整地作業の行程数は,自動操舵を使用することで従来の運転操作に比べて作業行程数が減り,その分短時間での作業が可能になると考えられる.
1)北海道で観察される圃場の生育ムラ
北海道では,従来から土壌診断結果を基に圃場の熱水抽出性窒素などの土壌肥沃度を把握し,土壌肥沃度に応じて施肥量を変えることが指導されてきた(北海道農政部 2010).しかし,大区画の畑では異なる土壌の畑が 1 枚の畑にまとめられたり,作土の深さがばらついたりすることから,土壌肥沃度は 1 枚の圃場内でもしばしば異なり,作物の生育にむらが生じる.図 4 は,7 月中旬に北海道十勝平野で撮影されたコムギ圃場であり,土壌の肥沃度が高く成熟が遅れている部分は緑色に,倒伏した部分は白っぽく見え,成熟が早い(土壌の肥沃度が低い)部分は小麦色に見えている.このような圃場で倒伏を防ぎつつ,追肥により多収を得るには,生育量や土壌肥沃度に応じた肥培管理,すなわち可変施肥が有効と考えられる.可変施肥の施肥設計は,予測収量の高い部分への施肥量を増やし,収量が低いと予測される部分で減肥する方法(Raun et al. 2005)と,予測収量の低い箇所で増肥し,収量の平準化をはかる方法(Link et al. 2004)とがあり,いずれの方法でも窒素利用効率の向上効果が認められている.

圃場における可変施肥の方法は,トラクタ等に搭載した生育センサの情報に基づいて即時に施肥機を制御するセンサベースの方法と,あらかじめ得られた情報から施肥マップを作成し施肥機を制御するマップベースの方法が提案されている.センサベースの可変施肥は,トラクタに「CropSpec」(トプコン社)等の市販の光学センサを搭載し,センサにより受光した光の演算処理により生育指標値を出力し,指標値に対応した施肥を行う方法である.マップベースの可変施肥よりも簡易な手順で可変施肥を実行することが可能である.マップベースの可変施肥で利用される情報は,コンバインに装着した収量計によって計測された複数年の収量マップや(Blackmore et al. 2003,Taylor et al. 2001),リモートセンシングにより得られた生育情報から,窒素吸収量等を推定して施肥設計を行う方法(Wood et al. 2003)などが提案されている(原ら 2015).
2)生育センサを用いた可変施肥法
北海道における可変施肥技術は,生育センサを用いた手法が最初に導入された.これは,コムギのように追肥を中心とした肥培管理を行う作物を対象にすすんだ.可変施肥法は,追肥時の生育ムラから窒素吸収量を推定し,窒素吸収量が多い(土壌の窒素肥沃度が高い)部分の追肥量を基準量より減らし,窒素吸収量が少ない(窒素肥沃度が低い)部分では追肥量を増やす方法である.この可変施肥より,窒素の利用効率は高まり,コムギの収量は定量追肥に比べて 4%多収となり,過剰な追肥を避けることで施肥コストが低減される可能性が示され,倒伏のリスク低減も期待できることから品質の安定化にも寄与すると考えられている(原ら 2015).
3)マップベースの可変施肥法
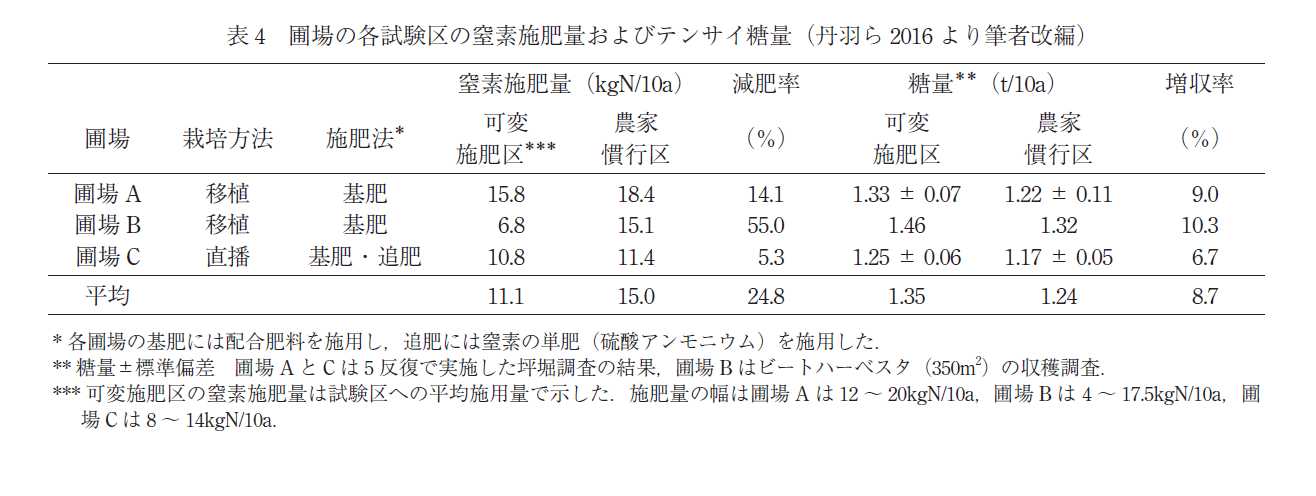
生育量や窒素吸収量を指標とする可変追肥は,基肥を中心とした肥培管理を行う,テンサイやバレイショに適用することが難しい.そこで,土壌の窒素肥沃度を推定し,施肥マップを作成して可変施肥を行う方法が検討された(丹羽ら 2016).この方法は,まず,光学センサなどで把握が容易な土壌の腐食含量(畠中ら 1989,丹羽ら 2004,2008)をリモートセンシングによって把握し,土壌の腐食含量から熱水抽出性窒素を推定し,熱水抽出性窒素のマップを作成する.次に,熱水抽出性窒素量は,「北海道施肥ガイド 2010」(北海道農政部 2010)に従い,窒素施肥量に読み替え,これらから,堆肥や残渣由来の窒素供給量(Fueki et al. 2011)を差し引いて窒素施肥マップを作成する.さらに,リン酸,カリウム等が必要施肥量以下とならないように可変補肥マップも作成し,それを基に可変施肥を実施するというものである.その結果,減肥率は平均で約 25%となり,テンサイの糖量は減肥したにもかかわらず各圃場とも可変施肥区が農家慣行区を上回り,平均で約 9%の増収となった(表4,丹羽ら 2016).
また,これまでに生育センサを用いた可変施肥を行っていれば,コムギなどの追肥時に得られた過去の生育センサデータを,圃場の肥沃度のマップに読み替えて,施肥マップを作成する方法が検討されている(原ら 2015,原 2016).この方法では,年次によって生育が大きく異なる地点や,毎年生育が劣る地点を窒素施肥による生育改善が困難な箇所として抽出し,それ以外の地点には,過去の 3 年から 4 年分の生育マップを活用して,熱水抽出性窒素を推定し,施肥マップを作成して可変施肥を行う(道総研農業研究本部 2017).生育センサによる可変施肥システムの適用場面を,てんさい基肥等に拡大することが可能になった.
4)その他の情報利用の可能性
このような,土壌の窒素肥沃度や作物生育のムラは,作土の厚さや,作土の下層に位置する排水不良層の存在に影響されると考えられる.若林ら(2016)は,電磁誘導探査装置(EM38-MK2)を用いて,センサが示す指標値と礫の深さとの関係を検討し,礫の深さから圃場内の作土の厚さを把握し,これらの情報を可変施肥に利用することが検討された.
排水不良が生育不良要因と考えられる区画は,排水改良を行う必要がある.既存暗渠による排水を追加的に改良する方法として,穿孔暗渠機「カットドレーン」や有材補助暗渠機「カットソイラー」が開発された(常田,北川 2011,北川 2012).革新的技術開発・緊急展開事業」(うち経営体強化プロジェクト)では,圃場内に偏在する生育不良要因に応じて対応するため,これらの施工マップと,可変施肥マップを組み合わせて提供することを検討しており,精密農業のコスト削減と,効果の向上による多収化の実証を行っている.
1 戸あたりの経営耕地面積は今後も増加すると予想されている.労働生産性が高いコムギの作付面積だけが増えた場合,所得の増加は面積の増加に比べて小さくなり,地域の農業生産額も低下することになる.自動操舵等の導入は,労働負担の軽減や,作業精度の向上に寄与しており,特に,4 月中旬から 5 月上旬の長時間の労働時の疲労を軽減することで,経営規模が拡大する条件で輪作を維持し,所得の向上に寄与すると考えられる.しかし,自動操舵技術はオペレータの作業時間を減らす効果は認められない.生産者の労働時間を減らすには,外部支援の導入や,テンサイの直播栽培のような効率的な生産体系の割合を増やしていく必要がある.
可変施肥技術は,施肥マップを用いた可変施肥技術が開発されたことによりテンサイやバレイショにも適用が可能になり,それらの作物の増収に寄与することが確認された.前述したように,1 経営当たりのテンサイなどの作付面積を増やすには,省力的な技術体系を導入するだけでなく,単収を高めて所得を高める必要がある.輪作体系を維持するにはバレイショやテンサイなどの生産者の生産意欲を高める必要があることから,自動操舵技術や,作業支援技術などによる生産者の軽労化・省力化技術は,精密農業技術などの多収技術と合わせて普及をはかる必要があると考えられる.
本研究は,本文にも記載したように「攻めの農林水産業の実現に向けた革新的技術緊急展開事業」(うち産学の英知を結集した革新的な技術体系の確立)(2014 年度から 2015 年度),「革新的技術開発・緊急展開事業」(うち経営体強化プロジェクト)(2016 年度),「革新的技術開発・緊急展開事業」(うち経営体強化プロジェクト)(2017 年度から 2019 年度)の事業資金を用いて実施した.また,農研機構・北海道農業研究センター技術支援センター業務第 3 科の,人を対象とする研究に同意して試験に参加いただいた職員の皆様に御礼申し上げる.