Synopsis:
Laser ultrasonics have been studying for many years as a promising technique for evaluating industrial materials. The non-contact technique, however, still have some problems in practical use for large structures such as pipes, tanks, bridges, etc. Authors have adopted the scanning laser source technique for imaging defects in a plate-like structure to solve one of the problems that elastic wave cannot be measured stably with laser interferometory due to the unstable detection of scattering light at rough and inclined surfaces of existing structures. In this study, a remote experimental system of the defect imaging technique with the scanning laser source, which does not require cables between receiving transducers and experimental equipments, was developed. In the experimental system, laser emission signal detected by a photo-detector was used as trigger signal that requires quick response for accurate measurements. The other data that does not require such quick responses were transffered with local area network (LAN) communications. Using the remote defect imaging system, we confirmed that defect images can be obtained clearly as the conventional cablewired experimental system was used. Moreover, we obtained defect images at the distances of 2.6 m and 7.6 m between the plate specimen and laser equipment.
1. 緒言
鉄鋼プラントや社会インフラをはじめとする,日本国内の大型構造物の多くは高度経済成長期に建設されており,近年,老朽化が進んでいる。そのような構造物の健全性を確保するうえで,構造物や材料を壊さずに欠陥を検出し,定量的に評価することができる非破壊検査・評価の重要性が増大している。
種々の非破壊評価手段の中でも,超音波を利用した超音波探傷法は,材料内部を簡便に検査できるという特徴があり,鉄鋼製品や,コンクリート,樹脂といった工業材料だけでなく,医療分野への応用も進んでいる。中でも,超音波探触子を構造物表面に接触させてエコー波形を受信する超音波パルスエコー法は,材料内を往復するエコーの到達時間の遅れや振幅変化などから肉厚や欠陥位置の測定を行う方法であり,信頼性の高い方法として鉄鋼プラントの検査では広く利用されている。しかし,超音波探触子を接触させる必要があるため,高所や狭隘部にある構造物の検査は難しいのが現状である。さらに,検査範囲は超音波探触子の直下わずかな領域のみであり,構造物全体を検査するには多大な時間とコストがかかる。
そこで,非接触での検査を可能にする手法として,超音波の励振,受信にレーザ光を用いるレーザ超音波法が1980年代より盛んに研究されるようになった1,2,3,4,5,6,7,8)。このレーザ超音波法では,パルスレーザを対象物表面に照射した際の熱弾性効果やアブレーションを利用して超音波を励振するため,パルスレーザを適切に照射することができれば比較的容易に超音波の励振は実現できる。しかし,超音波の受信は,対象表面に照射したレーザの反射・散乱光と参照光との干渉を利用して測定しているため,対象物の表面形状などにより,材料表面での反射・散乱光を捉えるのが難しい場合があり,特に屋外の構造物への適用を考えると課題が多かった。
そこでHayashiらはこの問題を解決するために,レーザ弾性波源走査法9,10,11,12,13,14,15,16)を利用し,走査範囲の損傷画像を得るという研究を進めてきた。レーザ弾性波源走査法とは,弾性波励振用のレーザ光を走査し,材料表面に固定した受信探触子で,走査点ごとの多数の波形から得られる情報を処理して損傷などの検知を行う手法である。文献13)では,なだらかな損傷のある薄板に対して弾性波を入力し,その受信波形から低周波数領域のラム波A0モードの振幅分布を作ると,受信信号の振幅がレーザ照射点付近の板厚に反比例することを示した。さらに文献14)において,複数の受信探触子により得られる画像を合成することで,より鮮明な損傷画像が得られることも示した。また,一般の超音波材料評価では利用されない100 kHz以下の低周波数帯域であっても,レーザ弾性波源走査法では良好な空間分解能を保ち,薄板裏面の人工損傷画像を取得できることを示した15)。
本研究は,このレーザ弾性波源走査法を用いた損傷画像化技術を,鉄鋼プラントをはじめとする大型構造物に対して遠隔から利用することを目的としている。本報では,現場での操作性向上を考えて,レーザ発振側の装置と受信探触子側の機器を無線化したリモート損傷画像化システムを開発し,損傷画像化実験を行って本システムの有効性を検証する。
2. リモート損傷画像化システム
2・1 概要
本研究では,レーザを用いた非接触での弾性波励振と,接触圧電素子を用いた弾性波受信を組み合わせたレーザ弾性波源走査法を,大型構造物に対して遠隔から利用することを考え,その際の現場的な課題を解決するため,受信圧電素子と測定装置間の長尺ケーブルを無くした無線システムを構築する。
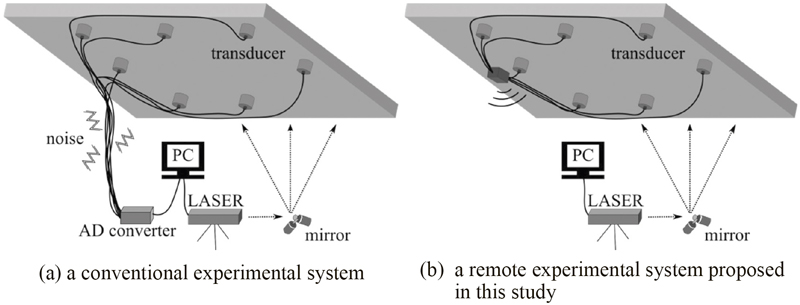
これまでのレーザ弾性波源走査法をそのまま適用した場合の実験セットアップをFig.1(a)に示す。レーザ装置等の機器の設置場所と対象構造物および受信探触子の位置が離れているものの,レーザを適切に集光できれば対象構造物にラム波を励振することは可能であり,損傷画像化にとって原理的な問題はない。しかし,遠方の対象構造物に取り付けた受信探触子と,波形記憶装置とを結ぶケーブルが非常に長くなってしまい作業の妨げになりかねないだけでなく,ケーブル線に混入する電磁ノイズが大きくなり受信信号の劣化をも引き起こすなどの現場的な問題が現れる。さらに,参考文献14)のように複数の受信探触子を用いる場合には,長尺ケーブルの本数が増え,取り扱いがますます困難になってしまう。このような問題を解決するために,本研究では,Fig.1(b)のように対象構造物に設置した受信探触子と波形記憶装置の間の無線化を行い,そのために課題となるトリガ信号の取得とデータ転送手法について検討する。
超音波非破壊評価のようなアクティブセンシングの場合には,超音波の送信タイミングトリガを示すTTL信号をAD変換器に入力し,同期をとりながら波形を受信する。このトリガ信号は,受信する超音波の振動周期に比べ十分小さい時間精度で検出する必要があり,通常ps~nsオーダーの再現精度が必要となる。しかし,一般的な無線通信ではmsオーダーの精度が限界であり,トリガ信号をこのような無線通信技術で伝送することは不可能である。また,受信された波形のデジタルデータは非常に大きなデータサイズであり,複数点での波形を全て受信しながらデータ転送することはほぼ不可能である。
本研究で提案するリモートシステムでは,弾性波の励振にパルスレーザを利用していることに着目し,レーザの材料表面での散乱光をフォトディテクタにより受光し,その信号をトリガ信号として用いる。また,レーザ弾性波源走査法により得られる最終結果である損傷画像のみLANにより転送することで転送データの容量を削減し,波形データの転送速度の問題を解決する。
Fig.2は本報中で用いた実験システムの概要である。レーザ装置や回転ステージコントローラなどを制御する主パソコンとAD変換器からの信号を処理する副パソコンを用意し,それらがLANにより通信することで,長尺ケーブルを無くしたシステムとしている。
レーザ光を遠方で適切に集光するために,ここではFig.2に示したような3枚のレンズを用いた。中央のレンズ位置を調整することにより,焦点位置を変更することが可能であり,後の実験では短光路距離として2.6 m,長光路距離として7.6 mの2つの異なる距離に対し,このレンズの位置を調整して適切に集光することで,いずれの光路距離においても弾性波の励振を可能としている。このレンズ系を用いた場合の焦点ビーム径は,近軸光線近似17)により算出することが可能であり,2.6 mの場合は約1.7 mmであり,7.6 mの場合は約4.8 mmである。
以下では,レーザ光を用いたトリガ信号の取得,LANを利用した遠隔通信について具体的に説明する。
2・2 レーザ光を用いたトリガ信号の取得
レーザ弾性波源走査法において,レーザ光の照射タイミングと超音波の発生はほぼ同時であると考えてよく,そのレーザ光をフォトディテクタで受光した際の信号をトリガ信号として利用できると考えられる。そこで,立ち上がり時間1 nsのフォトディテクタ(DET10A,Thorlabs製)を対象平板から約1 mの位置に設置し,平板にレーザ照射した際の散乱光を受光した。ここでは,安定的なトリガ信号を得るため,フォトディテクタに50Ωのスルーアッテネータを接続後,40 dBのアンプに通して信号を増幅した。Fig.3はレーザ照射時に得られた受光波形の一例を示す。時刻0の位置は,レーザ装置のQスイッチトリガのタイミングである。40 dBのアンプを通しているため,フォトディテクタの立ち上がり時間のカタログ値1 nsよりも遅くなっており,5 Vまで上昇するのにかかる時間は約60 nsである。今回,実験で用いる圧電素子の中心周波数は10 kHz以下であり,その周期が約100 μs以上であることを踏まえると,この立ち上がり時間は十分な速さであり,トリガとして利用できることが分かる。
2・3 LANを利用した遠隔通信
本システムにおいて無線化を実現するために,トリガ信号以外の高速性を必要としない通信にはLANを用いた。すなわち,レーザ装置やステージコントローラなどの大型装置の近くでそれらの操作やパラメータの入力などを行う主パソコンと,波形受信後の処理を検査対象物の近くで行う副パソコンを用意し,それらをLANによって通信しながら計測する。
Fig.4に計測時の各PCが行う作業のフローを示す。初めに主PCにおいて,レーザ装置やAD変換器,ステージコントローラなどの各装置のパラメータおよびレーザ走査点の情報を入力する。このうち,副PCに接続されているAD変換器のパラメータと走査点の情報は副PCに転送される。その後,作業者が計測開始指令を送ると,主PC内では,レーザ光を走査点の初期位置に照射するため,定められた角度へミラーを回転させる。2つのミラーの回転が終了すると回転終了信号を副PCへ送り,それにより副PCはトリガ信号待機状態となる。主PCはレーザ装置にレーザ照射指令を送り,レーザが照射される。副PC側では,そのレーザ光をフォトディテクタで受光し,トリガ信号を得てAD変換器が波形の取得を開始する。波形を取得すると,フィルタ処理や波形の記録,振幅分布の取得を行い,データをメモリに蓄積する。その後,レーザ照射位置を更新して計測を繰り返すことにより,最終的にレーザ走査点全体の損傷画像を取得する。
本システムでは,用いたレーザ装置の繰り返し周波数が最大20 Hzであったため,高速での損傷画像化は行わず,ミラーの回転を走査点ごとで止めながらレーザ照射を行った。しかし,文献16)で示されるように高繰り返しのレーザ装置を用いることで,高速での損傷画像化は可能であり,その場合にはミラーの回転は止めずに,ミラーの回転角に応じたトリガ信号をステージコントローラから出力させてレーザを照射する。
3. リモート損傷画像化実験
3・1 実験装置および方法
2章で述べたリモート損傷画像化システムを用いて,実際にレーザ弾性波源走査法により損傷画像化実験を行った。レーザ発振源としては,Nd:YAGレーザ(Quantel Brilliant Ultra,波長:532 nm,パルス幅:7.6 μs,ビーム直径:2.2 mm,拡がり角:4.7 mrad,繰り返し周波数:20 Hz)を用いた。前述のとおりアルミニウム平板に照射されたレーザ散乱光をフォトディテクタ(DET10A,Thorlabs製)により受光し,アンプで40 dB増幅しAD変換器のトリガ信号として利用した(Fig.2)。
アルミニウム平板中を伝搬した弾性波は,板の上下左右の中央4点(Fig.2)に設置した公称中心周波数6 kHzのPZT型圧電素子により受信した。圧電素子の設置には接着剤やカップリング剤などを使わず,ドライな状態で上からテープで貼り付けた。これは,遠隔にある構造物表面に圧電素子を設置する際,手間のかかる処理が困難であることを考慮したもので,テープで貼付する程度の作業であれば遠隔操作によるロボットやマニピュレータなどにより容易に設置が可能である。
受信された信号はアンプにより60 dB増幅した後,AD変換器で取得したデジタル波形データを副PC内で信号処理を行い,損傷画像を取得した。具体的には,収録時間0 μs~5000 μs間の信号を,4 kHz~10 kHzの4次のチェビシェフ型バンドパスフィルタでフィルタリング処理を行った後,最大値を抽出し,レーザ照射点ごとにその最大値の分布データを副PC内メモリに蓄積した。最終的には,文献14)–16)に倣い,これら各受信点に対して得られた振幅分布図の和をとることで1つの損傷画像を得た。また,ここでは,将来的に損傷画像を高速化する際,文献16)のように走査しながらレーザを照射して波形を得るという測定方法を利用することを念頭におき,波形の平均化は行っていない。
試験体として500 mm×500 mm板厚6 mmのアルミニウム合金平板を用い,その裏面には,模擬損傷としてFig.5(a),(b)に示すような切欠きを作成し,その表面(c)の2つの破線で示された大小の矩形領域にレーザを照射して損傷の画像化を行った。
3・2 実験結果および考察
初めに,自動回転ステージに設置したミラーとアルミニウム平板試験体との距離を約2.6 mとして,模擬損傷の画像化を行った。レーザ照射領域の中央付近の位置においてレーザ焦点径が最小になるようにレンズ位置を調整した後,各レーザ照射位置に対し,4つの圧電素子においてそれぞれ受信波形を取得した。また,この時のレーザ出力は,グランレーザプリズムを使って調整し,6.0 mJとなるように調整した。
Fig.6は,Fig.5(c)中のS点にレーザを照射したときに,A点の圧電素子により受信された波形とその波形を4 kHz~10 kHzの4次のチェビシェフ型バンドパスフィルタによりフィルタリング処理を行った波形である。トリガ信号としてフォトディテクタでの信号を利用する本リモートシステムにおいて,明瞭な弾性波波形が取得できていることが示されている。平板表面にレーザ光を照射して離れた点で受信されたこの波形は,過去の理論的および実験的研究から,ラム波A0モードの成分が大きいことが推測される1,16,18)。得られた受信波形の中心周波数はいずれも約7.5 kHzであり,圧電素子の公称中心周波数6 kHzよりもやや大きくなった。このとき,厚さ6 mmのアルミニウム平板(縦波音速6300 m/s,横波音速3100 m/sとして計算)に対し,7.5 kHzにおけるラム波A0モードの群速度は1266 m/sであり,レーザ照射点Sと受信点Aまでの距離245 mmを伝搬するのにかかる時間は約194 μsである。このラム波A0モードの伝搬時間とFig.6に示された波形を比較すると,測定された生波形には100 μs程度,フィルタ処理後の波形では300 μs程度の遅れが現れていることが分かる。これは,波形増幅器内に内蔵されるアナログフィルタおよびチェビシェフ型バンドパスフィルタによる時間遅れであるが,本実験においては,測定波形の最大振幅を必要とするので,このような時間遅れは問題とならない。

最初の到達波形以降にも大きな波形信号が計測され,本実験における計測時間範囲の最大値5000 μsまで続いた。つまり,Fig.6に示された波形は,直接到達波以降の様々な経路の波形を含んでいることが分かる。波形の抽出時刻を調整することにより,直接到達波に近い部分だけを使って損傷画像化を行うことも可能であるが,以降の結果では,文献16)に倣い,様々な伝搬経路の波形が重なったFig.6のような0 μs~5000 μsのフィルタ処理後の波形を用いて,各計測点における振幅分布図およびその和として取得する損傷分布図を取得した。これにより,レーザ照射位置と受信圧電素子間の距離が,逐次変更されるレーザ弾性波源走査法による測定においても,その距離を正確に把握しておく必要はなく,本損傷画像化手法を構造物検査に適用する上で好都合となる。
Fig.7は上述のリモートシステムを用いて,平板内の310 mm×330 mmの領域に対し,2 mmピッチ,156×166=25896点にレーザを照射した際の振幅分布図である。(a)~(d)の個々の振幅分布図は,各測定波形の最大振幅値を156×166点のレーザ照射点に対応する2次元配列に配置したものを濃淡で表しており,2次元配列要素の平均値の2倍が1になるように正規化している。Fig.8(a)は,それら4つの2次元配列の平均をとって得られる損傷画像である。またその比較として,レーザ装置からのQスイッチトリガをAD変換器のトリガ信号として利用したこれまでの有線実験システムを用いた場合の損傷画像をFig.8(b)に示した。Fig.7(a)~(d)の振動分布図において,模擬損傷位置は共通して濃く現れているが,その他の領域では濃淡が異なる位置に現れていることが分かる。これは,模擬損傷や端面での反射の影響を受けたものである。しかし,この反射の影響による濃淡はFig.7(a)~(d)の和をとることにより低減され,また共通して現れる損傷位置にのみ輝度の大きな部分が残る。Fig.7(a)~(d)の和に対応する損傷画像Fig.8(a)は,この性質を利用したものであり,より鮮明に損傷画像が得られていることが分かる。また,模擬損傷が深いほど,より鮮明に傷の有無や形状が判別できている。これらの傾向は,文献14)–16)にも示されており,今回のリモートシステムによる損傷画像の取得においても,これまでのレーザ弾性波源走査法による結果と定性的に同じ傾向を得た。また,Fig.8(a),(b)を比較すると,ほぼ同一の損傷画像が得られており,リモートシステムが適切に機能することが示された。
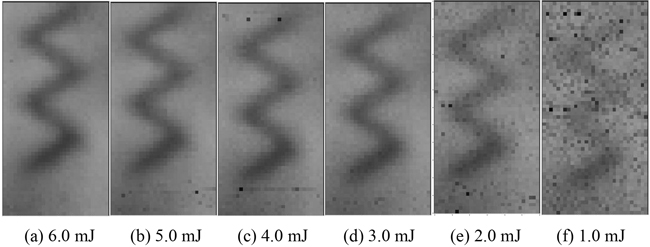
次に,Fig.8で得られた損傷画像の内,最も深いジグザグ傷の60 mm×30 mmの領域を,1 mmピッチで走査して得た損傷画像をFig.9に示す。このとき,Fig.8同様に,ミラーから対象平板までの距離は2.6 mであり,グランレーザプリズムを調整することにより,レーザパルスの出力を(a)6.0 mJから(f)1.0 mJまで段階的に変化させた。レーザパルスの出力が小さくなるにつれてSN比が低くなるため,画像が不鮮明になることが分かる。
Fig.10は,ミラーから対象平板までの距離を7.6 mにしたときに同じ領域に対して得た損傷画像である。ここでは同じ実験環境内で光路距離を延伸するため,2枚の全反射ミラーを試験体近くとレーザ装置近くに設置してレーザ光を1往復させ,模擬的に長距離離れた対象物に対する実験としている。また,その光路距離に対し,試験体表面で焦点を結ぶように,Fig.2のf=150 mmのレンズの位置を数mm移動させて,最小の焦点径に調整してから損傷画像化実験を行った。Fig.9と同様に,(a)~(f)はレーザパルス出力の違いによる損傷画像の変化を示す。まず,Fig.10において,十分な損傷画像が得られており,光路距離7.6 mという遠距離であっても損傷画像化が可能であるといえる。さらに,Fig.9とFig.10を比較すると,7.6 mの遠距離であっても損傷画像の劣化がほとんどなく,良好な結果が得られていることが分かる。これは,光路距離の変化によりレーザ焦点径が変化しているものの,ラム波A0モードは同程度発生しているためであると考えられる。
前述のとおり,7.6 mの遠距離では焦点径が大きくなり,単位面積当たりの入熱量が減少するため,照射領域近傍の熱膨張による局所的な体積ひずみは小さくなる1,6)。一方で,外部負荷点が平板を伝搬するラム波の波長に比べ十分小さい場合には,外部負荷点の面積に応じてラム波の振幅は大きくなる8,19,20)。ここでは,ラム波A0モードの波長が約87 mmであるのに対し,レーザ焦点径が約1.7 mm,4.8 mmとなり,レーザ径に応じてラム波A0モードの振幅が増大する。この二つの相反する作用により,2.6 m,7.6 mいずれの場合にも,同信号レベルのラム波が検出され,いずれも良好な損傷画像が得られたのである。ここでは,短い光路距離の例として2.6 mを,長い光路距離の例として7.6 mの結果を示したが,その間の距離に対しては同様の結果が得られる。また,より長距離または短距離の場合には使用したレンズによる集光が適切に行えないことがあるため,レンズ系を選択しなおす必要がある。
4. 結言
本研究では,レーザを用いた非接触での弾性波励振と,接触型圧電素子による弾性波受信を組み合わせたレーザ弾性波源走査法を大型構造物に適用するために,レーザ光を利用したトリガ取得技術と,LANによる遠隔通信技術を組み込んだ無線計測システムを提案・開発した。このシステムにおいても安定した波形計測が可能であり,既存の計測システムとほぼ同じ損傷画像を得ることができた。また,レーザ光の伝搬距離が2.6 m,7.6 mのいずれにおいても,レンズ位置の微調整によりレーザ光を平板表面に集光することで,同程度の損傷画像を取得することができた。
現状,材料表面に損傷を起こさない程度にレーザエネルギを減衰させて実験を行っており,さらに遠距離で劣悪な環境であっても,照射エネルギを調整することで十分な信号が得られ,画像化が可能であると考えられる。
謝辞
本研究の遂行にあたり,京都大学大学院工学研究科琵琶志朗教授には多大なご助言をいただきました。また,一般社団法人日本鉄鋼協会「第23回鉄鋼研究振興助成」のご支援により行われました。記してここに謝意を表します。
文献
- 1) C.B. Scruby and L.E. Drain: Laser ultrasonics: techniques and applications, Adam Hilger, New York, (1990).
- 2) J.-C. Cheng and Y.H. Berthelot: J. Phys. D. Appl. Phys., 29 (1996), 1857.
- 3) C.M. Scala and P.A. Doyle: J. Acoust. Soc. Am., 85 (1988), 1569.
- 4) A.K. Kromine, P.A. Fomitchov, S. Krishnaswamy and J.D. Achenbach: Mater. Eval., 58 (2000), 173.
- 5) Y. Sohn and S. Krishnaswamy: Ultrasonics, 39 (2002), 543.
- 6) J.D. Achenbach: J. Mech. Phys. Solids., 51 (2003), 1885.
- 7) I. Arias and J.D. Achenbach: Int. J. Solids Struct., 40 (2003), 6917.
- 8) Y. Shi, S.-C. Wooh and M. Orwat: Ultrasonics, 41 (2003), 633.
- 9) Y. Sohn and S. Krishnaswamy: Meas. Sci. Technol., 17 (2006), 809.
- 10) Y. Sohn and S. Krishnaswamy: Ultrasonics, 39 (2002), 543.
- 11) J. Takatsubo, B. Wang, H. Tsuda and N. Toyama: Trans. Jpn. Soc. Mech. Eng. A, 72 (2006), No.718, 945.
- 12) J. Takatsubo, B. Wang, H. Tsuda and N. Toyama: J. Solid Mech. Mater. Eng., 1 (2007), 1405.
- 13) T. Hayashi, M. Murase and M.N. Salim: J. of Acoust. Soc. Ame., 126 (2009), No.3, 1101.
- 14) T. Hayashi, M. Murase and T. Kitayama: Review of Progress in Quantitative Nondestructive Evaluation, 30 (2011), 713.
- 15) T. Hayashi, M. Murase and T. Kitayama: Ultrasonics, 52 (2012), 636.
- 16) T. Hayashi, M. Murase, N. Ogura and T. Kitayama: Mater. Trans., 55 (2014), 1045.
- 17) 三宅和夫:幾何光学,共立出版,東京,(1979).
- 18) T. Hayashi, K. Yamaguchi and S. Biwa: J. Phys. Conf. Ser., 520 (2014), 012024.
- 19) I.A. Viktrov: Rayleigh and Lamb waves, Plenum Press, New York, (1967), 67.
- 20) J.L. Rose: Ultrasonic waves in solid media, Cambridge University Press, Cambridge, (1999), 200.