Research Activity
[title in Japanese]
2024 Volume 2024 Issue 8 Article ID: JRJ20240801
Details
2024 Volume 2024 Issue 8 Article ID: JRJ20240801
JARIシンポジウム JARI取り組み紹介:自動運転車の安全性評価について
- SAKURAプロジェクトの現状報告 -
日本の自動運転システムの安全性評価プロジェクトであるSAKURAプロジェクトは2018年から経済産業省・国土交通省の「自動走行ビジネス検討会」傘下で実施され,ドイツの自動運転システムの安全性評価プロジェクトであるPEGASUSファミリーをはじめ国際的な連携を構築しつつ進められてきました.本報告では,安全性評価手法の標準化等,これまでの活動成果の一部をご紹介します.なお本稿は,JARIシンポジウムの講演を元に再構成したものです*.
1. はじめに
日本の自動運転システムの安全性評価プロジェクト(通称SAKURA:Safety Assurance KUdos for Reliable Autonomous Vehiclesプロジェクト)は2018年から経済産業省事業として開始されており,産官学のオールジャパンで取り組んでいます.日本の安全性の考え方に基づく評価手法を国際的な制度調和,国際標準に組み込んでいくために国際的な合意形成に貢献していくことを目指すプロジェクトです.
自動運転の安全性評価の国際的な動向ですが,最近では米国の西海岸地域でかなり活発にロボットタクシーの実路での評価が行われております.米国の複数地域でロボットタクシーサービスを運用しているWaymo社を例に挙げると,自社システムの安全性評価の比較対象として,平均的なヒューマンドライバよりも優秀なドライバとして NIEON(Non-Impaired, with Eyes always ON the conflict)というドライバモデルを定義しています.このモデルを自社の自動運転システムの頭脳となるAIドライバがどの程度安全であるのかの評価基準として用いている状況となっております.
このように海外においてさまざまな安全性の評価手法,手段の研究が進められている状況ではありますが,2019年時点で国際的な自動運転の安全性に関する基本的な考え方が示されております.先の本田技研工業株式会社の波多野様*2のご講演でもご紹介がありましたように,2018年9月に国土交通省が定めた安全技術ガイドラインは,「自動運転の安全性は合理的に予見される防止可能な人身事故が生じないこと」とされ,この定められた内容を目標として達成することが必要となります.(図1)

図1 自動運転車が満たすべき安全性
ここで,自動運転システムの安全性をどのような物差しを使って評価をしていくのかということが課題となります.自動運転システムにより公道を走行した際のデータを取得したうえで,徹底的に評価していくというアプローチは重要です.その一方で,安全性評価に用いることが妥当なシミュレーションを活用し,ロジカルでかつ納得性の高い効率的な評価の手法も重要といえます.このような考えのもと,2016年からドイツでPEGASUSという安全性評価プロジェクトが日本より先行して開始されており,そこでは実際の交通環境を走行したデータを分析し,他車両との交錯による交通外乱としてどのような事象が起きているのかについてデータベース化を行い,最終的に出力される合理的に予見可能なシナリオをシミュレーション評価することが提唱され,これがシナリオベースの安全性評価アプローチということで現時点でも主流となるアプローチとして定着しております.
2. 日本の安全性評価手法の特徴
SAKURAプロジェクトは立ち上げ後の早い段階から独と連携を進めており,日本自動車工業会が提唱する「自動運転の安全性評価フレームワーク(Ver. 1.0,2.0)」で定義されている認知・判断・制御に関する3つのシナリオ体系に基づくシナリオのパターン,および各シナリオにシステムが対応できていることを評価する手法を日独共同で提案を行って参りました.(図2)

図2 国内の安全性評価手法の取組み
SAKURAプロジェクトでは,安全走行を妨げる自車周辺の交通参加者の位置と動作を定量的に定義することを主に活動を進めています.具体的には,成果の一部(本線を車線維持する場合のシナリオパターン)が2019年6月に策定された国際基準(UN-R157:Automated Lane Keeping Systems)に反映されたことであり,このなかではシステムが遭遇しうるシナリオとその範囲,シミュレーション・テストコース・公道などでのテストを通してシステムが注意深く有能な運転者と同等以上の安全性を確保できているか確認することが示されています.
ただし,この注意深く有能な運転手と同等以上のレベルであることを多様なシナリオに合わせて定義していくことは非常に難しく,自車が自動車専用道の本線を走行中に他車がカットインするシナリオは定義したものの,その他にも道路環境や他車の行動が異なるシナリオに対応できるように定義していくことが求められます.それぞれのシナリオにおいて注意深く有能な運転者を定義していくことが今後の課題となると認識しているところです.
これまでの内容を踏まえまして,SAKURAプロジェクトで取り組んでいる内容をご紹介します.自動運転システムの社会実装に向けて,システムの開発過程において,評価の段階できちんと適用できる客観的な評価の手段を事前に確立する必要があります.シミュレーションやテストコースでのテストによって評価を行うにあたり,JARIのような中立機関が監修する客観的なシナリオをデータベースから適切に選択できるようにすることを目指しております.さらに,先ほど申し上げた通り,このような自動運転システムの安全性を評価する検証プロセスを国際標準にしていくことも狙っております.(図3)
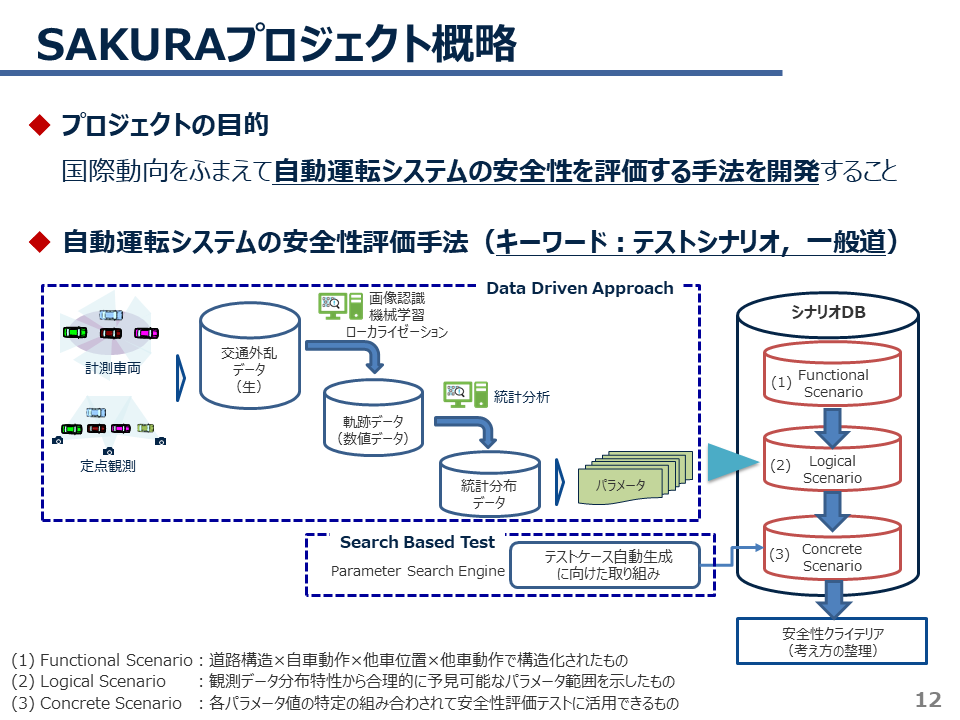
図3 SAKURAプロジェクトの概略
そのためには,自動運転システムの安全性をどのような評価条件で最終的に評価したのかを客観的に示せる手順が必要となります.したがって,SAKURAプロジェクトでは安全性評価用のシナリオを導出するための4つのプロセスを挙げております.
第1に,実交通環境において発生する他車両との交錯の実態を把握するための客観的なデータを,計測車両や定点観測によって計測します.第2に,計測したデータから自動車専用道の24シナリオ(自車が本線を車線維持している際に前方車両が減速するパターンなど)に該当するデータを抽出し,シナリオごとに必要なパラメータを分析できる処理を行います.第3に,該当したシナリオの自車速度や車間距離といったパラメータの分析結果に基づいて統計分布や相関関係を把握します.第4に,分布形状や相関関係を考慮し,将来起こりえる範囲を外挿することによって合理的に予見可能なシナリオを定義できる個々のパラメータが取りうる値の範囲を推計します.このようなプロセスを通して最終的に網羅的なテストを実行できる評価条件を定めています.
3. 合理的に予見可能な範囲と防止可能な範囲を定義する手法の研究
合理的に予見可能な範囲を特定する詳細な内容をご紹介します.これは計測車両を用いた実交通環境データの解析例ですが,自車が車線維持をしている前方にトラックがカットインする過程を正確に分析するためにLiDARなどのセンサーを用いて計測しております.こういった計測には不正確なデータも含まれますので,そのようなデータを分析対象から除外したうえで自車の走行軌跡や他車との相対関係を定量化していきます.(図4)

図4 カットイン事例(計測車両)
このような実交通環境データは,計測車両に加えて定点観測によって収集しており,シナリオの特徴に合わせて適切な手法を選択しております.具体的な例として,首都高速道路の東池袋に存在する助走区間の短い合流部分の交通状況を計測するため,ビルの屋上に定点カメラを置いて合流する車両と本線を走行する車両との位置関係の解析を行っております.このように合流部の実態を把握するために定点観測を用いる場合,計測車両によるデータ計測より効率的にデータ収集が可能という利点がありますので,目的に応じて計測手法を併用してデータを計測しております.
統計的に信頼できる分布に至るためには必要十分なデータ件数を蓄積していく必要があり,カットインパターンでは911件のデータを収集しております.カットインのシナリオを定義するための自車の初期速度であれば図5の左上のような形状の分布が得られ,他のパラメータについてもそれぞれ分布が得られ,このような結果をふまえて起こりうる走行状態を予見可能な形で扱えるように処理を行っていきます.それでテストのシナリオを決めていくのですが,こういったパラメータを単純に全て掛け合わせると膨大な数になります. (図5)

図5 他車カットインの特徴
そこで,関連するパラメータ間,例えば自車の初期速度と相対速度,他車との相対速度は相関があるけれども,他車カットインの左右速度の最大値とは相関がないといったところを分析し,評価で考慮すべき関係性のあるパラメータの組み合わせを検討しております.このような形で相関関係を考慮したパラメータ範囲・パラメータ空間が特定できるため,シナリオデータベースに実装するシナリオごとの予見可能なパラメータの範囲を準備することができます.これらのパラメータ空間から安全性評価シナリオを設定することによって予見可能な範囲をカバーできているということが説明可能になります.パラメータ範囲の妥当性を説明するために事故事例との比較を行い,パラメータ範囲に含まれているかという観点で確認をしております.(図6)

図6 パラメータ間の相関関係
安全性評価を実施するための重要な課題として,自動運転システムとの比較対象となるヒューマンドライバをいかに定義するかがあります.具体的には,注意深く有能な運転者をどのようにモデルとして定義していくのかといったところがポイントです.ヒューマンドライバが事故を回避するための過程を詳細化するため,リスク認知に必要な反応時間などで定義したり,最終的にブレーキを踏み込んで到達する最大減速度やそこに至る時間などで定義したりする検討が必要となります.(図7)

図7 注意深く有能なドライバ
他車がカットインをする場合ですと,他車が自車の方に入ってくるタイミングをどのように定義するのか,ドライバが危険と判断をして最終的にブレーキペダルを踏んで最大減速度に到達するまでに必要なパラメータを用意し,先行研究やドライビングシミュレータ実験で取得したヒューマンドライバのデータを加味して注意深く有能な運転を模擬する反応時間などの定量化を行いました.このモデルは国際基準であるUNR157のなかでC&Cドライバ(Competent & Careful Driver)という名称で反映されております.(図8)

図8 国際基準のカットインシナリオ
比較対象となるヒューマンドライバの定義ができることで,システムが回避可能な範囲が明確となるため,安全性評価の合否に関する目標が定まります.このような検討を通して,合理的に予見可能かつ防止可能な範囲をシミュレーションによって評価できるということになります.
4. 国際標準化に向けた連携・協調の推進と今後の取組み
2018年からSAKURAプロジェクトを進めてきたなかで国際連携と標準化活動に貢献しております.日独の連携を進めたことで当初からシナリオベースの安全性評価アプローチを国際的な標準とする方向で議論をリードしておりますし,効率的な評価・検証に向けてシミュレーションに活用できるシナリオデータベースについても世界的にも中立機関が提供しているという例があまりないなかで,仏の自動運転システムの安全性評価手段をデータベースとして整備を手掛けていたMOOVEプロジェクトやSystemX 社とも連携を進めてきました.米国も連携を進めており,安全性を論証するためのデータ構築という観点で数十年に渡ってデータ収集とデータベース構築を進めているバージニア工科大学と連携も進めております.(図9)

図9 国際連携・協調活動の概要
このように,日本の安全性評価手法を国際標準にするという目標に向け,国内では日本自動車工業会と相談・連携をしたうえで国際的な合意形成を継続的に進めております.そのような活動の成果ということで,先の経済産業省の伊藤室長のご講演*3でもありましたように,ISO 34502(自動運転システムのシナリオに基づく安全性評価フレームワーク)という形で安全性評価の枠組みが発行され,発行に向けて日本が議論をリードするためにSAKURAプロジェクトの成果は積極的に活用されてきました.ISO 34502では,安全性評価のために必要なテストシナリオの導出と評価に関するプロセスが示されていますが,安全目標の設定から具体的なテストのシナリオの特定,シナリオを用いたテストの実行・評価を行うという具体的な実行プロセスまで落とし込めるようになっております.(図10)
最後に,ここまでのまとめと今後の取り組みになります.冒頭にご説明したように,自動運転システムの運行設計領域において合理的に予見可能かつ防止可能な人身事故が起きないことをいかに論証するかがポイントとなるなか,SAKURAプロジェクトでは,自動運転システムの対応力を客観的に評価できるプロセスとともに,安全性評価用のテストシナリオを出力できるデータベースの構築を進めているところです.さらに,評価の基準となる注意深く有能な運転者についても科学的なエビデンスに基づいて,より広範なシナリオに適用できるように拡張することを準備しております.今後,一般道で徐々に自動運転システムの実用化が進んでいくということで,システムの評価シナリオのパターンを一般道に拡充していくということと, シナリオデータベースをより実用的に使っていただけるような機能の拡充を行っております.

図10 ISO 3405Xの策定状況
一般道のシナリオについては波多野様*2からご紹介があったように,対車両ではこれまでの自動車専用道24パターンを含む58パターンで定義しており,自車の旋回,対向する他車両,交差点などの要素が一般道で増加する要因となっております.(図11)

図11 自専道・一般道シナリオの一覧
データベースの機能拡充を順次行っており,SAKURAプロジェクトで構築中のシナリオデータベースを今後は開発の現場で活用していただけるように取り組みを進めております.このデータベースでは,網羅的なシナリオ体系から必要十分なシナリオの設計を行います.評価したいシナリオ,評価の基準となるドライバモデルなどを選択します.続いてシナリオ範囲を設計するにあたって,これまでに計測・分析してきた実交通環境データの特徴を参照しながらテストシナリオを設計することができます.最終的にそのような設計されたシナリオをASAM(自動化システムと測定システムの国際標準化団体)で議論されている一般的な形式としてOpenSCENARIO,OpenDRIVE形式に準拠したシナリオをアウトプットし,これを各シミュレーション環境で読み込んで実行することで効率的な評価・検証が進められるようになると考えております.そして,多様な評価結果をユーザの操作画面上で効率的に管理したり,結果を総括するドキュメントを作成したりするなどの機能も実装を進めているところです.このような形で,実際の開発場面で活用していただけるようなシナリオもあります.(図12)

図12 実装中のシナリオデータベース
JARIは自動運転システムの社会実装を安全性評価という観点で支えていけるよう,国内外の関係者と連携をしながら貢献していく所存です.
ご理解とご支援のほど,よろしくお願い申し上げます.