Abstract
2018年4月よりロボット支援下腹腔鏡下直腸切除術,切断術が保険収載され注目を集めている.海外ではロボット支援下結腸切除術も増加傾向にあるが,本邦からの報告は見られない.今回,当科にて本邦初となるda Vinci Xiサージカルシステムを使用したロボット支援下結腸右半切除術を2例経験したため報告する.恥骨上横一列のポート配置でリンパ節郭清,結腸授動を行い,吻合は体腔内でSure Form®を用いて行った.いずれも合併症なく第6病日に退院となった.ロボット支援下右側結腸切除術では腹腔鏡と比較し手術時間が長い傾向にあるが出血量低下や合併症率の低減,疼痛の軽減といったメリットが海外から報告されている.本邦においても安全性,根治性において,従来の腹腔鏡手術と遜色ないこと,さらには優越性を証明するために,さらなる経験とエビデンスの蓄積が必要と考える.
Translated Abstract
Since the Japanese insurance system initiated coverage of robotic proctectomy, the number of procedures performed and their importance are gradually increasing. Robotic colectomy is also increasingly reported worldwide, but not in Japan. We herein report two cases of robotic right colectomy utilizing the da Vinci surgical system Xi® for the first time in Japan. D3 lymphadenectomy and right colon mobilization was performed with the placement of four trocars in line with and above the pubic tubercle, and intra-corporeal anastomosis was performed using SureForm®. Both patients were discharged on postoperative day 6 without any complications. It has been reported that robotic colectomy requires a longer operation time than that required for conventional laparoscopic colectomy, but the estimated blood loss, complications, and pain after surgery may be decreased. To confirm the safety and curability of robotic colectomy, further studies and case encounters are needed.
はじめに
大腸癌は世界で毎年100万人以上新規に診断されており,日本でもがん死亡率の3位を占め罹患率は1位である重要な疾患である1).また,大腸癌の手術手技は比較的確立されており腹腔鏡下手術も全国で広く行われている2)3).一方でロボット支援手術は2018年4月より泌尿器科領域に加えて直腸切除,切断術をはじめとした12術式が保険収載された.それに伴って直腸癌に対するロボット支援手術は件数を増やしているとともに,より低侵襲な手術手技として注目を集めている4).海外では結腸癌に対するロボット支援手術も増加しつつあるが,日本におけるロボット支援下結腸切除術の報告は見られない5).当科では,今後のロボット支援下結腸右半切除術(robot-assisted right colectomy;以下,RARCと略記)の開発および本邦での普及を目指し,院内倫理委員会の審査を経て,本邦初となるda Vinci surgical system Xi®(以下,DVSSXiと略記)を用いた,RARCを開始した.今回その2例を経験したため,これらを報告する.
症例
症例1:82歳,女性,身長155 cm,体重52 kg,BMI 21.6
既往歴:子宮筋腫(単純子宮全摘術後),外傷性くも膜下出血,糖尿病,高血圧症
現病歴:便潜血陽性で近医受診し下部消化管内視鏡検査施行,盲腸癌と診断された.精査の結果盲腸癌cT3,cN0,cM0,cStage IIと診断,手術を予定した.
手術所見:手術時間は4時間26分,出血量は少量であった.
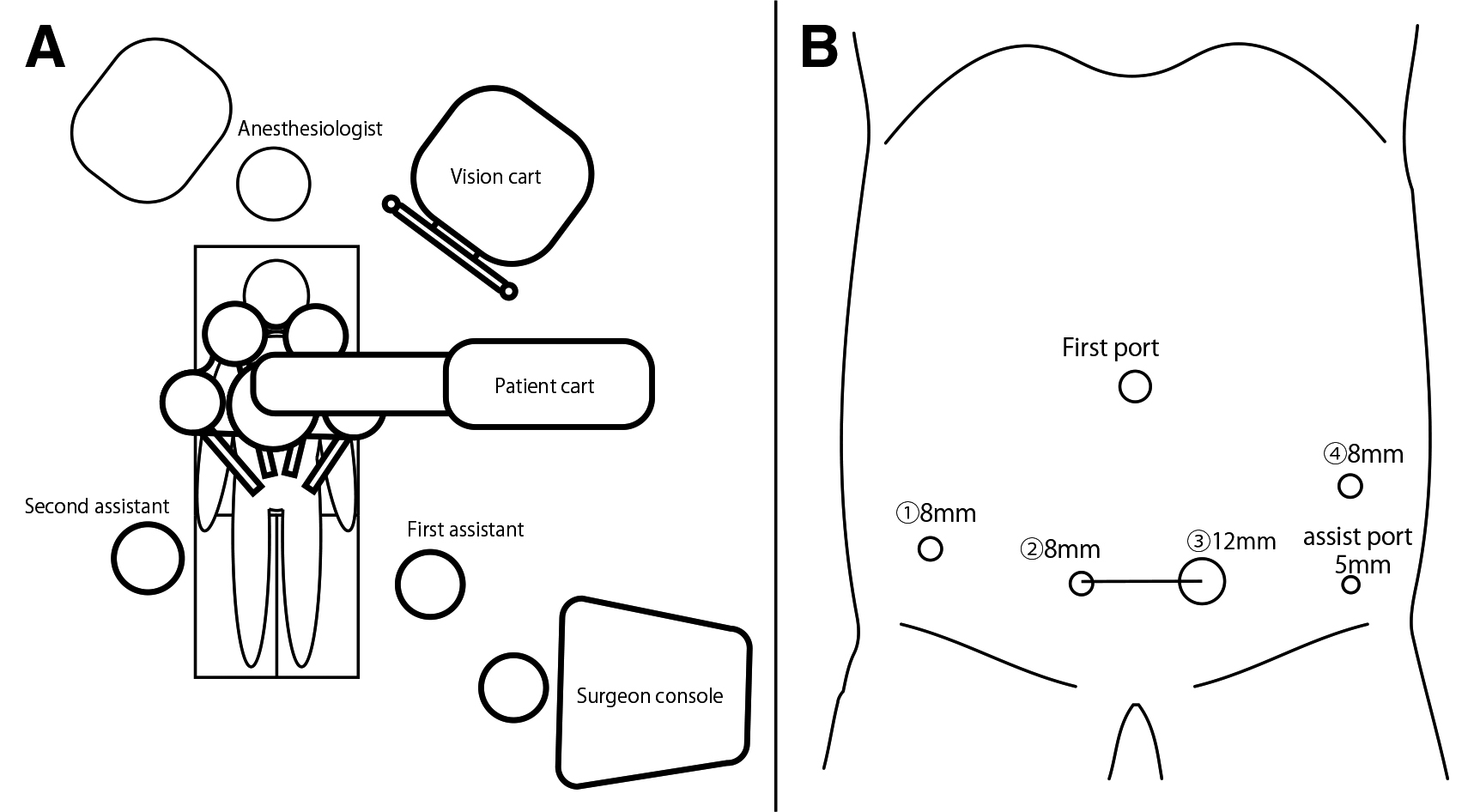
体位は仰臥位とし患者左側にpatient cartを置きupper abdomen modeの設定とした(Fig. 1A).臍よりバルーンポートを挿入し気腹開始,これを助手用アシストポートとして使用した.下腹部に4か所ポートを挿入(右側が1番ポート),3番ポートを12 mmとしその他を8 mmポートとし,ポート間は約6 cm離した.1番アームはfenestrated bipolar forceps,2番はカメラ(30°斜視鏡),3番はmonopolar curved scissorsもしくはvessel sealer,4番はtip-up fenestrated grasperを主に使用した(Fig. 1B).吻合の際に,3番ポートからSure Form®を使用した.ターゲッティングは肝彎曲に向かって行った.ポート位置を恥骨上と上前腸骨棘から3 cm以上離すことでロボットアームと患者との干渉がない操作が可能であった.
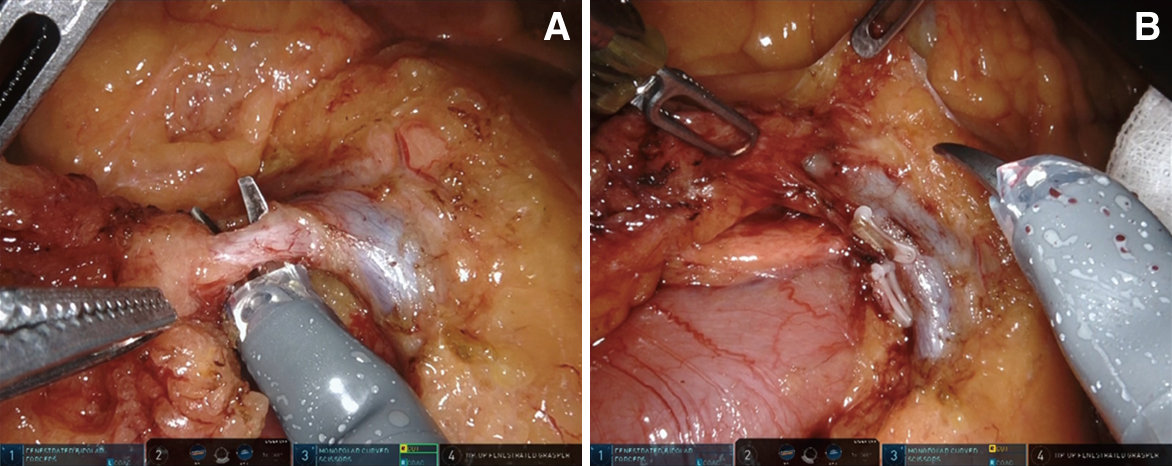
Tip-up fenestrated grasperを使用し回結腸動脈(ileocolic artery;以下,ICAと略記),回結腸静脈(ileocolic vein;以下,ICVと略記)のpedicleを挙上しICA尾側の腸間膜をmonopolar curved scissorsで切開し,上行結腸間膜を後腹膜,十二指腸,膵前面から授動した.郭清は上腸間膜静脈(superior mesenteric vein;以下,SMVと略記)の左縁までとし,SMV前面を露出してICV根部を切離し,同レベルでICAを切離した(Fig. 2A).郭清を頭側に進め,中結腸動静脈右枝を同定しこれを切離した(Fig. 2B).
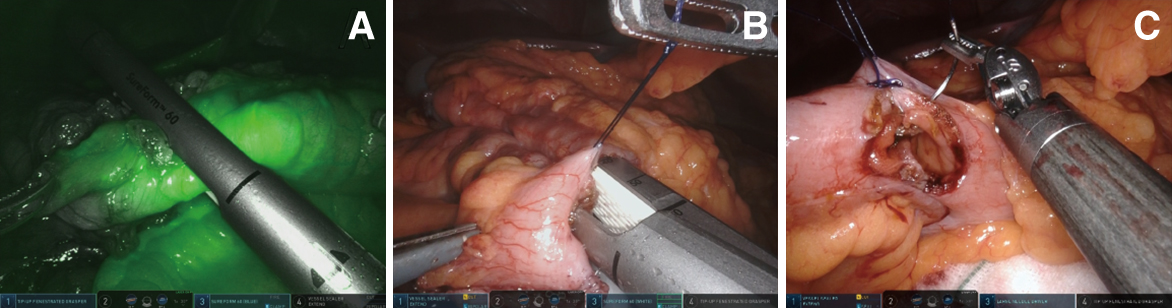
肝彎曲から盲腸まで外側授動を追加し,内側アプローチの層と連続させることで,盲腸から横行結腸まで完全に授動した.回腸はバウヒン弁より口側約10 cmで,結腸は横行結腸やや肝彎寄りで切離することとした.郭清端より腸管切離予定ラインに向かって腸間膜を処理し,切離予定ラインで腸管を全周に露出した.Firefly®機能を使用してICG蛍光法による血流評価を行い,腸管切離ラインを最終的に規定した.血流が良好であり,吻合にあたって十分な可動性を確保した位置で腸管切離を行った結果,肛門側切離ラインは10 cmよりやや肛門側となった(Fig. 3A).結腸切離はSure Form® 60 mm Blueを使用し回腸切離は同Whiteを使用した.
回腸横行結腸吻合をoverlapで行った.縫合器挿入口近傍に支持糸をかけ,Sure Form®を挿入し側々吻合を行った(Fig. 3B).共通口は3-0 STRATAFIX®で連続縫合し閉鎖した(Fig. 3C).
2番,3番ポートをつなげ,約8 cmの横切開で小開腹し標本を摘出した.腹腔内を生理食塩水3,000 mlで洗浄,J-VAC®ドレーン19 Frを右下腹部ポートより挿入し右傍結腸溝に留置し固定した.小切開創は0 PDS®で筋膜を閉鎖し4-0 PDS®で真皮埋没縫合し閉創し手術終了とした.
病理組織学的検査所見:VC,Circ,Type2,pT4a,pN2a(4/26),M0,pStage IIIc(Fig. 4)
術後経過:術後第1病日より飲水開始,第3病日から食事開始し,第6病日で合併症なく退院となった.
症例2:62歳,男性,身長161 cm,体重60 kg,BMI 23.1
既往歴:内痔核,前立腺肥大症
現病歴:盲腸0-IIa病変に対して当院消化器内科でESD施行した.病理でT1b(sm1,500mcm),ly0,v1,HM0,VM0の結果であったため追加切除の方針となった.
手術所見:手術時間は3時間51分,出血量は少量であった.
ポートセッティングから剥離,郭清操作,腸管切離までは症例1と同様に行った.
再建は体腔内にてfunctional-end-to-end-anastomosis(以下,FEEAと略記)で行った.ステープルライン近傍に小孔を開けSureForm®を使用し側側吻合を行った.共通口は3-0Vicrylで3針の支持糸をかけSure Form® Blue 60 mmで閉鎖した(Fig. 5A~C).
標本摘出から閉創も症例1と同様に施行した.
病理組織学的検査所見:C,0-IIa,pT1b,pN0(0/21),M0,pStage I(Fig. 6)
術後経過:術後第1病日より飲水,第3病日から食事開始し,第6病日で合併症なく退院となった.
考察
ロボット支援下手術では,関節による高い自由度,3D高精細画像,手振れ防止機能,モーションスケールによる微細動作,安定した視野など,従来型の腹腔鏡手術ではなしえない利点を有しており,より術者の意のままに精細な操作が可能となる6).直腸癌に対するロボット支援手術は,本邦においては2009年に勝野らが最初に報告し,現在では多数例をまとめた報告も散見される7)8).
結腸癌に対する腹腔鏡下手術では開腹手術に比べ出血量や術後合併症率の低下,術後在院日数の短縮が得られるといわれており9),腹腔鏡下結腸右半切除(laparoscopic right colectomy;以下,LRCと略記)は本邦でも広く行われている標準治療の一つとして位置づけられている10)が,ロボット支援下結腸切除術は保険適用外であり,国内における報告はない.医学中央雑誌で1964年から2019年3月までの期間で「ロボット」および「結腸癌」をキーワードとし会議録を除いて検索したところ,2件のS状結腸切除の報告のみで,直腸切除とは術式の大きく異なる右側結腸切除の報告は確認できなかった.海外では2002年にWeberら11)が最初に報告した後,特に米国において症例数は増加している12).
海外のRARCとLRCを比較した報告をTable 1に示す13)~18).短期成績に関しては多くの報告でRARCにおいて手術時間の延長を認めている一方で,合併症発生率はRARCにおいて低下すると報告している.合併症が有意に減少したと報告した2本ではいずれも術後イレウスの発生率が低下したと報告している.また,Rondelliら6)によるmeta-analysisによると,出血量はRARC群において優位に低下(mean difference(MD)23.19;P<0.001)し,術後合併症率もRARC群において優位に低下(odds ratio 1.65;P=0.02)したと報告している.長期成績に関してはParkら18)のランダム化試験によれば術後5年の生存率,無病再発率には有意差は見られなかった.RARCはLRCと比較して遜色ないと思われるが,大規模なランダム化比較試験は組まれておらずエビデンスの蓄積は不足しているといわざるをえない.
Table 1
Summary of robot-assisted laparoscopic right colectomy
| No. |
Author |
Year |
No. of cases |
Operation time
(min) |
Blood loss
(ml) |
Morbidity
(%) |
Hospital stay
(day) |
|
| Robot |
Lap |
Robot |
Lap |
Robot |
Lap |
Robot |
Lap |
Robot |
Lap |
| 1 |
Rawlings13) |
2007 |
17 |
15 |
218 |
169
0.002 |
40 |
66
0.067 |
|
|
5 |
6
0.862 |
|
| 2 |
Deutsch14) |
2012 |
79 |
92 |
134 |
140
0.510 |
76 |
123
0.036 |
8 |
23
0.022 |
4 |
6
0.133 |
|
| 3 |
Shin15) |
2012 |
6 |
6 |
343 |
251
0.054 |
185 |
242
0.871 |
|
|
9 |
11
0.123 |
|
| 4 |
Casillas16) |
2014 |
27 |
41 |
142 |
79
<0.01 |
63 |
57
0.780 |
9 |
39
0.030 |
6 |
6
0.470 |
|
| 5 |
Ngu17) |
2018 |
16 |
16 |
213 |
162
0.023 |
|
|
25 |
25
0.385 |
5 |
5
0.402 |
|
| 6 |
Park18) |
2018 |
35 |
35 |
195 |
129
<0.001 |
47 |
36
0.311 |
17 |
20
0.500 |
8 |
8
0.130 |
P-value |
腹腔鏡下右半結腸切除術における体腔内吻合は体腔外吻合に比べ切開創がより小さくすみ,牽引による腸間膜の損傷や切開創の開大による体壁破壊を低減することで,創感染や疼痛が軽減し,腸管機能の回復を早め術後在院日数の短縮につながるとされる19)20).また,体腔内吻合は体腔外操作による開腹創の制約がないため小切開部位を自由に選択することができる.正中切開と比べ腹壁瘢痕ヘルニアの発生が少なく整容面にも優れる横切開を選択することも可能である20).腹腔内吻合は腹腔内で腸管を開放するため,SSIや播種再発が懸念されるが,既報では腹腔内膿瘍の発生に差はなく,腫瘍学的にも再発率に差はないとされている21).報告では問題ないとされていても,腸管開放時間を短縮させることは重要と考えており,腹腔鏡下手術と比べてロボット支援下手術で行う利点の一つと考えている.
腹腔鏡下での体腔内吻合は,縫合結紮や自動縫合器の挿入などで難度が高く熟練を要するが,ロボット支援下手術では鉗子の自由度が良好であり安全かつ容易に吻合を行うことができる.今回の症例では,再建はoverlapとFEEAで施行した.初回例では残存横行結腸の自由度が低かったためoverlapで吻合を行った.2例目は横行結腸の可動性が良好であり,容易に回腸断端と横行結腸断端を尾側に向け平行に並べることができたため,当科で従来,体腔外にて行っているFEEAで吻合した.縫合器の挿入方向は多関節機能を用いることで容易に腸管の方向に合わせることができ,無理なく安全に吻合を行うことができた.本症例では2症例とも肝彎曲の授動を行っているが,手技が確立されれば腸管の授動と腸間膜処理を最小限にすることができるため手術時間の短縮につながり,また剥離面積が小さくなることで合併症の低減を実現できる可能性があると考える.
今回は臍ポートをfirst portとして気腹を行ったがDVSSXiのドッキング後は,ガーゼや針糸の出し入れにのみ使用している.特に体腔内吻合に不慣れなため,腸管開放後の不潔操作の時間短縮と助手鉗子の操作範囲を可能なかぎり短くするために,同ポートを用いることとした.同術式に習熟した後は,左下5 mmポートを12 mmにすることで,臍部のポートは省略できると考えている.
ロボット支援下右半結腸切除術では従来の腹腔鏡下手術と比較して術後イレウスをはじめとした合併症率の低減を期待できることに加え,従来法では困難であった腹腔内吻合が比較的容易となる.これにより在院日数の短縮や術後疼痛の軽減,整容面の向上などのメリットが得られると考える.また,ロボット手術におけるラーニングカーブの短縮により,JCOG0404の腹腔鏡手術群に生じたような施設間格差を減少させるという大事なメリットも期待したい.しかし,手術時間の延長やコストの増加といったデメリットも指摘されている.Rondelliら6)によるmeta-analysisでは手術時間はRARC群において優位に延長(MD −54.36;P<0.001)しており,また手術関連費用も優位に増加(standard mean difference −0.96;P<0.001)したとしている.手術時間は手技の習熟によりある程度の短縮が望めるが手術関連コストはロボットの導入費用やメンテナンス費用がかかるためどうしても上昇してしまう.ロボット導入コストについては今後の技術革新,企業間競争により低減されることを期待している.また,合併症率が下がることで,患者への利点だけではなく,合併症治療に要する医療費が軽減される可能性があるため,今後,長期的な検討を行う必要がある.
今回,我々は結腸癌に対するロボット支援下右半結腸切除術を2例経験し,いずれも術中出血量はカウント上0 ml,リンパ節郭清個数も十分で術後経過も良好であり,安全に施行可能であった.当術式は保険収載されておらず,また手術手技も確立していない.よって患者に十分ICをするとともに,ロボット操作,大腸癌手術に熟練した術者,助手の下で行われることが必要である.また,本術式が従来型のLRCに対して優越性を証明するには,さらなる経験とエビデンスの蓄積が必要である.
利益相反:なし
文献
- 1) Cancer Registry and Statistics. Cancer Information Service, National Cancer Center, Japan [Internet]. Center for Cancer Control and Information Services, National Cancer Center [cited 2019 Apr 25]. Available from https://ganjoho.jp/reg_stat/statistics/dl/index.html#mortality
- 2) 渡邊 昌彦, 猪股 雅史, 明樂 重夫, 橋爪 誠, 山口 茂樹, 江口 晋内,ほか.内視鏡外科手術に関するアンケート調査―第14回集計結果報告―.日本内視鏡外科学会雑誌.2018;23(6):727–890.
- 3) Cunningham D, Atkin W, Lenz HJ, Lynch HT, Minsky B, Nordlinger B, et al. Colorectal cancer. Lancet. 2010;375(9719):1030–1047.
- 4) 松山 貴俊, 絹笠 祐介, 中島 康晃, 小嶋 一幸.【ロボット手術の現状と展望】 大腸癌.癌と化学療法.2018;45(12):1696–1700.
- 5) Trastulli S, Desiderio J, Farinacci F, Ricci F, Listorti C, Cirocchi R, et al. Robotic right colectomy for cancer with intracorporeal anastomosis: short-term outcomes from a single institution. Int J Colorectal Dis. 2013;28(6):807–814.
- 6) Rondelli F, Balzarotti R, Villa F, Guerra A, Avenia N, Mariani E, et al. Is robot-assisted laparoscopic right colectomy more effective than the conventional laparoscopic procedure? A meta-analysis of short-term outcomes. Int J Surg. 2015;18:75–82.
- 7) Yamaguchi T, Kinugasa Y, Shiomi A, Kagawa H, Yamakawa Y, Furuatni A, et al. Short- and long-term outcomes of robotic-assisted laparoscopic surgery for rectal cancer: results of a single high-volume center in Japan. Int J Colorectal Dis. 2018;33(12):1755–1762.
- 8) 勝野 秀稔, 前田 耕太郎, 花井 恒一, 升森 宏次, 松岡 宏, 宇山 一朗,ほか.大腸癌に対するロボット手術導入.日本消化器外科学会雑誌.2010;43(9):1002–1006.
- 9) Rondelli F, Trastulli S, Avenia N, Schillaci G, Cirocchi R, Gullà N, et al. Is laparoscopic right colectomy more effective than open resection? A meta-analysis of randomized and nonrandomized studies. Colorectal Dis. 2012;14(8):e447–e469.
- 10) 大腸癌研究会編.大腸癌治療ガイドライン 医師用2019年版.東京:金原出版;2019. p. 57–8.
- 11) Weber PA, Merola S, Wasielewski A, Ballantyne GH. Telerobotic-assisted laparoscopic right and sigmoid colectomies for benign disease. Dis Colon Rectum. 2002;45(12):1689–1696.
- 12) Kulaylat AS, Mirkin KA, Puleo FJ, Hollenbeak CS, Messaris E. Robotic versus standard laparoscopic elective colectomy: where are the benefits? J Surg Res. 2018;224:72–78.
- 13) Rawlings AL, Woodland JH, Vegunta RK, Crawford DL. Robotic versus laparoscopic colectomy. Surg Endosc. 2007;21(10):1701–1708.
- 14) Deutsch GB, Sathyanarayana SA, Gunabushanam V, Mishra N, Rubach E, Zemon H, et al. Robotic vs. laparoscopic colorectal surgery: an institutional experience. Surg Endosc. 2012;26(4):956–963.
- 15) Shin YS. Comparison of short-term surgical outcomes between a robotic colectomy and a laparoscopic colectomy during early experience. J Korean Soc Coloproctol. 2012;28(1):19–26.
- 16) Casillas MA, Leichtle SW, Wahl WL, Lampman RM, Welch KB, Wellock T, et al. Improved perioperative and short-term outcomes of robotic versus conventional laparoscopic colorectal operations. Am J Surg. 2014;208(1):33–40.
- 17) Ngu JC, Ng YY. Robotics confers an advantage in right hemicolectomy with intracorporeal anastomosis when matched against conventional laparoscopy. J Robot Surg. 2018;12(4):647–653.
- 18) Park JS, Kang H, Park SY, Kim HJ, Woo IT, Park IK, et al. Long-term oncologic after robotic versus laparoscopic right colectomy: a prospective randomized study. Surg Endosc. 2019;33(9):2975–2981.
- 19) van Oostendorp S, Elfrink A, Borstlap W, Schoonmade L, Sietses C, Meijerink J, et al. Intracorporeal versus extracorporeal anastomosis in right hemicolectomy: a systematic review and meta-analysis. Surg Endosc. 2017;31(1):64–77.
- 20) Shapiro R, Keler U, Segev L, Sarna S, Hatib K, Hazzan D. Laparoscopic right hemicolectomy with intracorporeal anastomosis: short- and long-term benefits in comparison with extracorporeal anastomosis. Surg Endosc. 2016;30(9):3823–3829.
- 21) Hanna MH, Hwang GS, Phelan MJ, Bui TL, Carmichael JC, Mills SD, et al. Laparoscopic right hemicolectomy: short- and long-term outcomes of intracorporeal versus extracorporeal anastomosis. Surg Endosc. 2016;30(9):3933–3942.