摘 要
作物の形質を省力的に評価するためには,無人航空機(UAV)を用いたリモートセンシングが有用である.UAV空撮画像によるイネ稈長の推定可能性を明らかにするため,水田圃場においてReal-Time Kinematic-Global Navigation Satellite System(RTK-GNSS)を搭載した機体を用いて空撮を行った.得られた画像セットからStructure from Motion(SfM)により3次元点群を構築し,その空間精度を評価するとともに,イネの推定草高を抽出し実測稈長との相関を調べた.カメラに角度をつけて空撮を行った画像セットを用いた場合(カメラ角度−60°)では,カメラを真下に向けて空撮を行った画像セットを用いた場合(カメラ角度−90°)と比較して,検証用地点の空間誤差は小さかった.また,カメラ角度−60°の画像セットを用いた推定草高と,実測イネ稈長の相関係数(r)は,地上基準点(GCP)を使用しない場合で,撮影高度25 mでは0.897~0.924,50 mでは0.903~0.922,75 mでは0.881~0.900であった.カメラに角度をつけて空撮を行った画像セットからSfMにより3次元点群を構築し,草高を解析することで,試験圃場におけるイネ稈長を推定可能であることが示唆された.
Translated Abstract
Unmanned aerial vehicle (UAV)-based remote sensing is an efficient method for evaluating plant traits in agricultural fields. In a paddy field, aerial images for the structure from motion (SfM) process were taken with a UAV equipped with a real-time kinematic-global navigation satellite system (RTK-GNSS). To evaluate the UAV-SfM approach for the remote sensing of plant traits, two analyses were performed: first, we determined the accuracy of the 3D coordinates of ground control points (GCPs) estimated with the SfM point clouds. Subsequently, the correlation between plant heights and culm lengths, which were predicted with the SfM point clouds and measured manually in the field, was analyzed. The errors on estimating the 3D coordinates derived from the SfM point clouds generated from image sets taken diagonally (camera angle at −60 degrees) were smaller than that of nadir image sets (camera angle at −90 degrees). The correlation coefficients (r) between plant heights predicted with the UAV-SfM approach at −60 degrees camera angle without using GCPs and culm lengths measured manually were 0.897–0.924 at a flight height of 25 m, 0.903–0.922 at 50 m, and 0.881–0.900 at 75 m. Therefore, the culm length of rice could be estimated with a UAV-SfM approach using image sets taken at a diagonal camera angle.
緒言
近年,農業や環境調査を含む様々な分野において,無人航空機(Unmanned Aerial Vehicle,以後UAV)によるリモートセンシングの利用に関する研究が進められている(Colomina and Molina 2014).機体に搭載したマルチスペクトルカメラによって得られる光学的情報を利用した収量の推定,空撮画像に機械学習の手法を利用した雑草の検出など,農業分野へのUAVの応用研究事例は多岐にわたっている(Tsouros et al. 2019).著者らの研究グループも,UAVを利用したイネ科牧草品種の選抜・評価法(秋山ら 2018, 2019, 2020)や飼料用トウモロコシの罹病程度評価法(黄川田ら 2020)を開発している.
イネの稈長は,生育状態やバイオマスの指標となるだけでなく耐倒伏性にも大きく関与する,イネ系統の評価においては重要な形質の一つである.地表面と植物体の最高地点の高度差である「草高(plant height)」が計測される場合もあるが,「稈長」はなびきや倒伏による変動が少なく形態の特徴をより本質的に反映し,イネ系統の評価には重要視されている.稈長の計測は人手で一株ずつ行われ,多大な時間と労力を必要とするため,省力的に稈長のデータを取得する手法の開発が望まれている.
稈長や草高等の高さ情報に関する形質のリモートセンシングに関しては,複数の多視点画像から3次元点群を構築する手法であるStructure from Motion(SfM)(Hartley and Zisserman 2003, Kurz et al. 2011)や,照射したレーザーに対する散乱光から距離を測定する技術であるLight Detection and Ranging(LiDAR)の利用が検討されている(Yao et al. 2019).Obanawa et al.(2020)は,UAV空撮画像を用いたSfM(UAV-SfM)とLiDARを比較し,LiDARがより高い精度で牧草の草高を推定した事例を報告している.現在,LiDARは高価なデバイスであるため利用は容易ではないが,将来的な普及が望まれる技術の一つである.一方,RGB(Red:Green:Blue)カラーカメラを搭載した汎用UAVは,研究利用のみならず生産現場でも広く導入されつつある.よって,技術の普及という観点から,UAV-SfMの利用は有用であると考えられる.
これまでにUAV-SfMによるイネの草高推定に関する研究は複数報告されており(Jiang et al. 2019, Kawamura et al. 2020),イネ以外にもオオムギ(Bendig et al. 2014, Brocks et al. 2016),コムギ(Holman et al. 2016, Madec et al. 2017),トウモロコシ(Li et al. 2016, Chu et al. 2018),ソルガム(Watanabe et al. 2017)等に先行事例がある.これらのことから,UAV-SfMに関する知見は蓄積されてきており,試験圃場や生産現場での技術利用に近づいていると考えられる.しかし,これまでのUAV-SfMに関する報告は,ある一定の撮影条件で空撮を行った事例がほとんどであり,空撮時のカメラ角度,撮影高度等の撮影条件と草高の推定精度の関係については検討されていない.SfMにおいては中心部が高く外側が低いモデルが構築される「ドーミング(doming)」現象が発生し,誤差の原因となることが知られているが(Rosnell and Honkavaara 2012, James and Robson 2014),カメラの向きを真下ではなく角度をつけて空撮を行うことによってドーミングによる誤差が抑えられることが報告されている(James and Robson 2014,神野ら 2019).カメラに角度をつけて空撮を行うことで,UAV-SfMによる草高の推定精度も向上することが期待される.また,撮影高度が低いほど精細なモデルを構築できる一方で,撮影高度が高いほど1枚の画像に収められる範囲が広くなり,一定面積の圃場の撮影にかかる時間が短くなるという利点がある.試験圃場や生産現場での利用に向けて,適切なカメラ角度や撮影高度を検討する必要がある.
また,これまでのUAV-SfMを用いたリモートセンシング手法の一つの問題点として,高精度で3次元点群を得るためには緯度,経度,標高情報が明らかである地上基準点(Ground Control Point,以後GCP)が必要なことが挙げられる.対象圃場の状態によってはGCP設置が難しい場合があり,また,GCPの維持管理や測位には大きな手間を要する.さらに,SfM実行時のGCP情報付与の際にかかる労力も問題となる.SfMを実行する際には,画像内のGCPの位置に手動でマーカーを付けなければならない.数枚の画像のGCP位置にマーカーを手動で設置すれば,そのGCPが写っている他の画像にもソフトウェア上で自動的にマーカーは設置されるが,多くの場合,手作業でのマーカー位置の微調整が必要となる.
近年,人工衛星による位置情報を地上に設置した基地局から受信するデータで補正し,高精度の測位を実現するReal-Time Kinematic-Global Navigation Satellite System(RTK-GNSS)を搭載した機種が市販され,広く利用されるようになってきている.RTK測位による高精度位置情報がタグ付けされたUAV空撮画像を用いることでGCPは不要となるため, UAV-SfMの効率化が期待される(小花和ら 2019).
本研究は,RTK-GNSSを用いたUAV-SfMにおいてカメラ撮影角度,空撮高度の撮影条件が地理座標(緯度,経度,標高)推定の精度に与える影響を調査し,そしてUAV-SfMによるイネ稈長推定の可能性を明らかにすることを目的とした.
材料および方法
1. 供試材料と空撮
北海道農業研究センター(北海道札幌市)の約50 m × 4.7 mの水田圃場において,条間0.3 m,条長4 m,4条の試験区を38区設定し,2020年にイネの栽培試験を行った.系統選抜初期では各系統1条栽培で選抜を行うこともあるが,生産力検定試験では3~4条で栽培を行う.本研究においては,生産力検定試験の条件で圃場を設計した.試験区は,“赤毛”,“ななつぼし”などを含む過去から現在までの北海道の主要品種や系統で,極早生から極晩生の熟期をカバーした28の異なるイネ品種・系統を用いて設計した.今回の圃場試験では,試験区ごとの出穂期は最も早い区が7/27,最も遅い区が8/17であり,出穂期が8/1までの区を「早生」,8/9までの区を「中生」,それ以降の区を「晩生」と分類した.稈長の調査は2020年8月26日に行った.各試験区から生育が中庸な2箇所を選び,それぞれ10株ずつ主稈の地際から穂首までの長さを計測し,合計20株の平均値を稈長の測定値とした.
2020年8月下旬および9月下旬にPhantom 4 RTK(DJI JAPAN株式会社,東京)を用いて同水田圃場の空撮を行った.空撮条件を表1に示す.撮影高度4条件,カメラ角度2条件の組み合わせによる8条件について,乱塊法により3反復の空撮順を設定した.天候はいずれの空撮日も晴れまたは薄曇りであった.「カメラ角度」は水平方向からの角度を表しており,水平に向けた状態が0°,真下に向けた状態が−90°である.なお,カメラ角度−90°から−60°まで変化させて空撮を行った際に,カメラ角度−60°に向けて段階的にSfM精度が向上するという結果が予備実験において得られたため,本研究ではカメラを傾けた場合の代表としてカメラ角度−60°を採用した.UAVのRTK測位には,仮想基準点(Virtual Reference Station, VRS)方式の補正信号を使用した.
表1.
空撮条件
| 撮影日 |
推定対象 |
撮影高度(m) |
オーバーラップ率(%) |
サイドラップ率(%) |
カメラ角度 |
8月下旬:
2020/8/24[3反復] |
GCP座標,イネ稈長 |
25, 50, 75, 100 |
80 |
60 |
−60°, −90° |
9月下旬:
2020/9/29[1反復]
2020/9/30[2反復] |
イネ稈長 |
水田圃場の周囲から5つの特徴点を検証用地点(GCP-1~GCP-5)として定め,RTK-GNSS受信機(PENTAX G6J,TIアサヒ株式会社,さいたま市)を用いて各GCPの緯度,経度,楕円体高を測定した.楕円体高は地球楕円体からの高さであり,衛星測位では一般的に楕円体高が使用される.本研究では,標高の推定精度検証とイネ稈長推定に楕円体高を使用した.
2. SfMソフトウェアによる解析
空撮によって得られた画像セットから,SfMソフトウェアAgisoft Metashape Professional 1.6.3(Agisoft LLC, St. Petersburg)を用いて3次元点群構築を行い,数値標高モデル(Digital Elevation Model,以後DEM)およびオルソモザイク画像を構築し,投影座標系WGS84/UTM zone 54NでDEMとオルソモザイク画像を出力した.パラメータ設定を表2に示す.また,8月下旬撮影の画像セットに対しては,GCP-1~GCP-5の位置にマーカーを作成し,位置情報の測定値を入力してSfMを実行することで,GCPを使用した場合の3次元点群を構築し,同様にDEMとオルソモザイク画像を構築,出力した.
表2.
SfM解析パラメータ
| ポイントクラウド |
| |
精度 |
高 |
|
汎用事前選択 |
はい |
|
キーポイント制限 |
40,000 |
|
タイポイント制限 |
4,000 |
| 高密度ポイントクラウド |
|
品質 |
中 |
|
フィルターモード |
弱 |
| DEM |
|
ソースデータ |
高密度ポイントクラウド |
|
内挿補間 |
有効 |
| オルソモザイク |
|
ブレンドモード |
モザイク |
|
サーフェイス |
DEM |
|
穴埋めを有効にする |
はい |
Metashapeを用いて8月下旬撮影の画像セットから得られたオルソモザイク画像上にシェープファイルレイヤを作成し,各GCPの位置に点を配置した.シェープファイルは,点や直線,多角形の緯度・経度といった位置情報と各種の属性を保存する形式として一般的に利用されているファイル形式である.当レイヤをテキストファイルとして出力して各点の緯度,経度,楕円体高を取得し,これらの値をUAV-SfMによるGCPの位置情報推定結果とした.
RTK-GNSS受信機により測定されたGCPの位置情報とUAV-SfMにより推定された位置情報から,UAV-SfM推定誤差を算出した.RTK-GNSS受信機による測定結果とUAV-SfMによる推定結果の緯度・経度から2点間の水平距離を水平方向の誤差として算出した.緯度・経度から水平距離を算出する際はPython 3.6.8(Python Software Foundation 2018)とパッケージGeoPy 2.1.0(GeoPy Contributors 2020)を使用した.高さ方向については,DEMを稈長の評価に利用する際,植物体が存在する部分の楕円体高から地面の楕円体高を引いた差分を稈長の評価値とするため,ある基準からの相対高度の推定精度が重要となる.そのため,RTK-GNSS受信機による測定結果とUAV-SfMによる推定結果のそれぞれで,GCP-5を基準としたGCP-1~GCP-4の相対高度を求めた.楕円体高と相対高度について受信機による測定値とUAV-SfMによる推定値の差分を求め,UAV-SfMによる垂直方向の推定誤差の指標とした(図1).
4. UAV-SfMによるイネ稈長推定
オープンソースのGIS(Geographic Information System)ソフトウェアであるQGIS 2.18.28(QGIS.org 2021)を用いて,8月下旬撮影・9月下旬撮影の画像セットから得られたオルソモザイク画像上にシェープファイルレイヤを作成し,当レイヤ上で3.6 m × 0.6 m(条長の90% × 2条幅)の矩形を各試験区の中央に配置した(図2).また,圃場地表面の高度を得るため,圃場内四隅の植物体が無い地点に0.3 m四方の正方形を配置した.各試験区と圃場地表面の解析領域が配置された当レイヤをシェープファイルとして保存した.
Python 3.6.8(Python Software Foundation 2018)とパッケージGDAL 3.1.4(GDAL/OGR contributors 2021),pyshp 2.1.3(Joel 2021),Pillow 8.0.1(Clark 2015),numpy 1.19.4(Harris et al. 2020),pandas 1.1.5(The pandas development team 2020)を用いて,DEMとシェープファイルを読み込み,シェープファイルに記録された座標情報をもとに解析領域のDEMの値を抽出して統計処理を行った.各試験区の高度としてDEMの解析領域内ピクセルの平均値を使用した.また,8月下旬撮影・カメラ角度−60°の画像セットに関しては,先行研究で草高の推定に有効とされている99パーセント点と上位3%平均値をDEMから算出し(Chu et al. 2018, Kawamura et al. 2020),解析領域内の平均値を使用した場合と比較した.圃場地表面としては,4解析領域それぞれについてDEMの5パーセント点を算出し,これを平均することで地表面の高度とした.画像セットごとに各試験区の(植物体を含む)高度から地表面の高度を引くことで,UAV-SfMによる草高の推定値を得た.
試験圃場においては品種・系統の評価は1圃場内の相対評価によって行われるため,評価精度は相関の程度で判断することができる.したがって,圃場で実測した稈長と,8月下旬撮影の画像セットからSfMによって得られた推定草高の相関を分析した.また,9月下旬撮影の画像セットからも同様にSfMによる推定草高を取得し,撮影時期による推定結果の変化を調べた.
結果
1. カメラ撮影角度,空撮高度によるUAV-SfM精度への影響
8月下旬撮影のデータセットにおけるUAV-SfMによるGCP位置情報の推定誤差を図3に示す.25 m,50 m,75 m,100 mのどの撮影高度においても,カメラ角度を−60°とした場合は,カメラ角度を−90°とした場合と比べて,水平方向,楕円体高,相対高度のいずれの推定誤差も小さかった.
カメラ角度−90°においては,GCPの楕円体高を全体的に高めに,あるいは低めに推定している反復がみられ(図3B),SfM点群全体の高度が上下に大きくずれる現象が確認された.また,GCP-5を基準とした相対高度の推定誤差はほとんどが負の値を示し(図3C),基準としたGCP-5よりも外側にあるGCP-1~GCP-4の高度が低く推定される傾向がみられた(各GCPの配置は図1を参照).
カメラ角度−60°においては,楕円体高推定の絶対平均誤差(Mean Absolute Error,以後MAE)は撮影高度25 mで0.031 m,50 mで0.035 m,75 mで0.045 m,100 mで0.059 m,相対高度推定のMAEは25 mで0.015 m,50 mで0.012 m,75 mで0.029 m,100 mで0.044 mといずれも数cm程度の低い値を示したが,撮影高度が高いほど楕円体高や相対高度の推定誤差はやや増加した.
2. UAV-SfMによるイネ稈長推定精度の検証
圃場で実測したイネ稈長の要約統計量を表3に示し,実測稈長と,8月下旬撮影の画像セットを使用してSfMにより得られた推定草高の相関係数(r)を図4に示す(DEMからの各試験区の推定標高の算出には平均値を使用).AはGCPを使用しなかった場合,BはGCPを使用した場合である.GCPを使用しなかった場合で,カメラ角度を−60°とした際の相関係数は,撮影高度25 mでは0.897~0.924,50 mでは0.903~0.922,75 mでは0.881~0.900と高い値を示した.一方,撮影高度100 mでは相関係数0.810~0.843と,撮影高度25 m,50 m,75 mに比べてやや低い値を示した.カメラ角度−60°,GCP不使用の場合の相関係数についてTukey-Kramerの多重比較検定(5%水準)を行った結果,撮影高度25 m,50 m,75 mの間に有意差はなく,25 m,50 m,75 mのそれぞれと100 mの間に有意差があった.いずれの高度でもカメラ角度−60°に比べて−90°では相関係数が小さかった.SfMにGCPを使用した場合は,カメラ角度−90°ではGCP不使用の場合と比べて相関係数が高くなったが,カメラ角度−60°では相関係数の向上はみられなかった.
表3.
実測イネ稈長の要約統計量
| 試験区数 |
平均値(m) |
最小値(m) |
最大値(m) |
レンジ(m) |
標準偏差(m) |
| 38 |
0.619 |
0.472 |
0.778 |
0.307 |
0.072 |
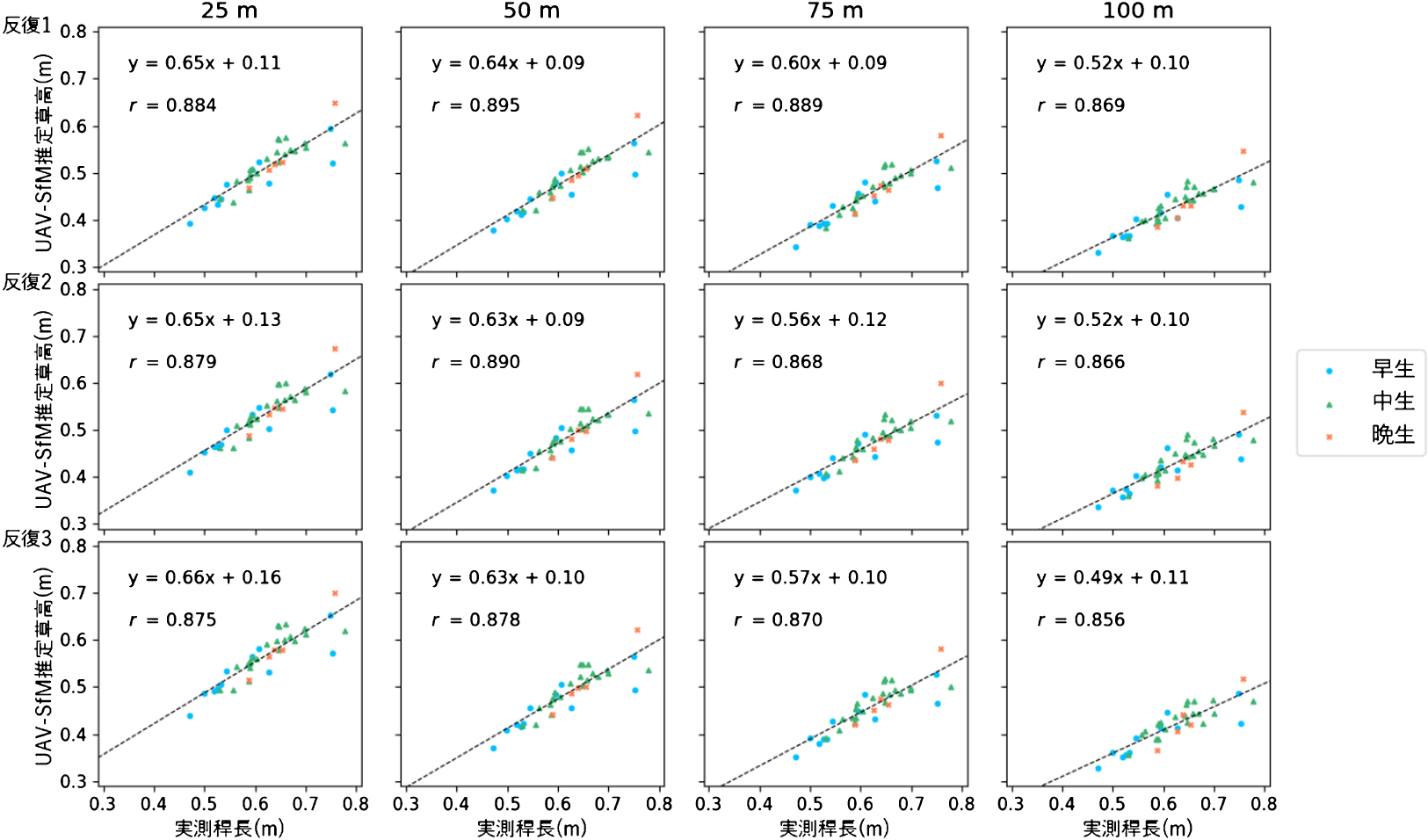
カメラ角度−60°・GCP不使用での各撮影高度・各反復における実測稈長と8月下旬撮影の画像セットによるUAV-SfM推定草高の散布図および一次回帰式・相関係数を図5に示す.撮影高度が高いほど回帰直線の傾きが小さく,相関係数が低下した.
3. 推定高度に用いる統計量による結果の変化
8月下旬撮影・カメラ角度−60°・GCP不使用のデータに関して,各試験区の高度としてDEM解析領域内ピクセルの平均値,99パーセント点,上位3%平均値を適用し,実測稈長と得られた各SfM推定草高の相関係数を比較した結果を表4に示す.撮影高度25 mでは99パーセント点や上位3%平均値を適用した場合においてやや相関が高くなったが,撮影高度100 mでは99パーセント点や上位3%平均値を適用した場合に相関が低くなり,全体としては明らかな差はみられなかった.
表4.
各試験区の推定高度算出に用いる統計量による,実測稈長とUAV-SfM推定草高の相関係数(
r,3反復の平均値)の変化.UAV-SfM推定草高は8月下旬撮影の画像セットを使用,空撮時のカメラ角度は−60°,GCPは不使用
| 撮影高度 |
平均値 |
99パーセント点 |
上位3%平均値 |
| 25 m |
0.913 |
0.922 |
0.922 |
| 50 m |
0.916 |
0.919 |
0.920 |
| 75 m |
0.893 |
0.887 |
0.887 |
| 100 m |
0.829 |
0.810 |
0.810 |
カメラ角度−60°・GCP不使用での各撮影高度において,8月下旬撮影の画像セットによるUAV-SfM推定草高(3反復)の平均値を横軸,9月下旬撮影の画像セットによるUAV-SfM推定草高(3反復)の平均値を縦軸に取った散布図を図6に示す.8月下旬撮影に比べて9月下旬撮影ではどの早晩性の区も全体的にUAV-SfM推定草高が低くなった.
実測稈長と,9月下旬撮影・カメラ角度−60°・GCP不使用での各撮影高度・各反復における画像セットによるUAV-SfM推定草高の散布図および一次回帰式・相関係数を図7に示す.実測稈長とUAV-SfM推定草高の相関係数は8月下旬撮影に比べて9月下旬撮影では低かった(図5,7).
考察
GCP相対高度推定において,カメラ角度−90°においては,基準としたGCP-5よりも外側にあるGCP-1~GCP-4の高度が低く推定されており(図3C,各GCPの位置は図1を参照),中心部が高く外側が低いモデルが構築されるドーミング現象の発生が示唆された.カメラ角度−90°に比べてカメラ角度−60°においてはドーミング現象が抑えられ,相対高度の推定精度が高いという本研究の結果は,先行研究と合致している(James and Robson 2014,神野ら 2019).また,その結果としてカメラ角度−60°において実測稈長とUAV-SfM推定草高の相関も高くなったことが推察された(図4A).ドーミングによる誤差を抑え植物体の草高を精度よく測定するためには,カメラの向きを真下(−90°)ではなく,角度をつけた空撮画像セットを用いるのが適当と考えられる.
GCP高度推定の結果から,カメラ角度−60°・撮影高度25 m~100 mでは楕円体高をMAE 0.031 m~0.059 m,相対高度をMAE 0.012 m~0.044 mで推定できることが確認され(図3B,C),この撮影条件で,稈長のレンジ30.7 cm,標準偏差7.2 cmの試験区群において実測稈長とUAV-SfM推定草高の間に高い相関が示された(表3,図4).これらのことから,RTK-GNSSを使用したUAV-SfMによって数cmの草高の違いを検出し,イネ稈長を推定・評価できることが示唆された.ただし,撮影高度を100 mまで上げると実測稈長とUAV-SfM推定草高の相関は低下した(図4,5).高い高度から撮影した画像セットから生成したDEMは解像度が下がるため全体になだらかなモデルとなり,実際の稈長が高い試験区に対して草高を低く推定しやすくなると考えられる.本研究で使用した機材では,75 m以下の撮影高度でイネ稈長推定の精度が高いことが示されたが,対象とする植物種や必要とする精度に応じて適切な撮影高度を設定する必要があると考えられる.なお,本研究で使用したPhantom 4 RTK搭載のカメラの場合,撮影高度25 m,50 m,75 m,100 mにおける地上解像度(ピクセル間の地表面上での距離)はそれぞれおよそ6.8 mm/pixel,13.7 mm/pixel,20.5 mm/pixel,27.4 mm/pixelである.センサーサイズや焦点距離の異なるカメラを使う場合は,同じ撮影高度でも地上解像度が異なるため,適切な撮影高度も変化すると考えられる.
カメラ角度−90°で空撮を行った場合は,SfM実行時にGCPの座標情報を使用することで実測稈長とSfM推定草高の相関は高くなったが(図4),カメラ角度−60°かつGCP不使用の場合に比べて高くはなく,またカメラ角度−60°の場合はGCP使用による相関の向上はみられなかった.以上のことから,RTK-GNSSを用いたUAV-SfMにおいては,カメラ角度−60°で空撮を行うことで,SfM実行時にGCPを使用しなくても高精度に草高を推定することが可能と考えられる.
本研究では,推定標高算出に用いる統計量による稈長推定精度の差は確認されなかった(表4).しかし,Jiang et al.(2019)は50・75・90・95・99パーセント点に比べて,平均値を適用した場合にイネ実測草高とSfM推定草高の相関が最も高かったことを報告している.一方,Chu et al.(2018)は99パーセント点がトウモロコシ草高の推定に適当であったこと,Kawamura et al.(2020)はパーセント点に比べて上位3%平均値がイネ草高の推定においてさらに高い推定精度を示したことを報告しており,どの統計量が適当かどうかは未だ明確には定まっていない.パーセント点や上位平均値は,試験区全体の平均値に比べて,地面が露出していて極端に低い箇所の影響を受けにくいという利点があるが,一方で,試験区内に草高の高い部分と低い部分がそれぞれ存在し偏りがある場合,草高の高い部分のみを評価してしまうおそれがある.本研究においては植物体が地面を十分に覆っており,また試験区内での草高の偏りも少なかったため,全体の平均値を適用する場合とパーセント点や上位平均値を適用する場合で相関にあまり変化がなかったと考えられる.高精度の草高の推定には圃場の状態に合わせた統計量の選択が必要である.
本研究における栽培試験では8月下旬の稈長計測・空撮の頃にはすでに出穂期を経過しており,それ以降稈長はほとんど変化しない生育ステージに入っている.8月下旬撮影に比べて9月下旬撮影の画像セットによるUAV-SfM推定草高は低くなる傾向がみられたが(図6),9月下旬においては子実が成熟して穂身が重くなり,稈がたわむことで草高が低くなったためと推察される.稈長をUAV-SfMによって評価するためには,伸長成長がすでに停止しており,かつ子実がまだ成熟していない時期を選んで空撮を行うことが望ましいと考えられる.一方,成熟期に向けて稈がたわむことによる草高の変化は稈の物理的強度や穂重などの形質を反映するため,UAV-SfM推定草高の時間変化を追うことで稈長以外の形質評価の指標として利用できる可能性も期待される.今後,撮影時期や対象形質の幅を広げて調査を続ける予定である.
今回の研究では,試験圃場内での相対評価を前提として,相関係数により稈長評価の可能性を検証したが,現場での生育モニタリングに利用する上では稈長を絶対評価する方法,すなわち未知のUAV空撮画像セットから稈長の絶対値を精度よく得る推定モデルが必要となる.植物体がなびいていると「稈長」の増加に対し「草高」の増加は小さくなるため,本研究でも実測稈長の増加に対する推定草高の変化率は1未満であった(図5,一次回帰式の回帰係数).したがってUAV-SfM推定草高をそのまま稈長の推定値とすることはできず,回帰モデルによって稈長を推定する必要があるが,ある圃場のデータから作成した回帰モデルが他の圃場における稈長の絶対評価に利用できるかどうかは明らかではない.また,生育ステージによって「稈長」とUAV-SfMで推定される「草高」の関係も変化すると考えられる.UAV-SfMにより稈長を絶対評価し,現場での生育モニタリングを行うためには,複数の圃場から各生育ステージの実測稈長と空撮画像のデータを収集し,学習用・検証用にデータを分割して生育ステージごとのモデルの学習・検証を行う必要があると考えられる.
本研究において,カメラ角度−60°の空撮画像セットではSfMにGCPを使用しない場合でもイネ実測稈長とSfM推定草高の間に高い相関が示された.試験圃場における稈長の評価にUAV-SfMが有用であり,RTKによる高精度測位を利用しカメラに角度をつけて空撮を行うことで,GCPの使用を省略し効率的に稈長の評価を行えることが示唆された.
謝 辞
本研究を実施するにあたり,圃場管理や計測にご助力いただいた北海道農業研究センターの三國孝博氏,岡田千夏氏,UAV-SfMについてご助言いただいたクウサツ・ドットコム株式会社の松浦彰氏,そして,衛星測位等にご協力いただいた北海道農業研究センターの小花和宏之上級研究員に感謝申し上げます.
引用文献
- 秋山 征夫・ 福重 直輝・ 菅 正・ 久保田 明人・ 田村 健一・ 眞田 康治・ 藤森 雅博(2018)Unmanned aerial vehicle(UAV)と画像解析法を利用した牧草育種評価法の開発.日草誌 64: 99–102.
- 秋山 征夫・ 久保田 明人・ 藤森 雅博・ 眞田 康治(2019)Unmanned aerial vehicle(UAV)と画像解析法を利用した牧草個体簡易選抜法の開発.日草誌 65: 8–14.
- 秋山 征夫・ 無田 廣之・ 鈴木 尚也・ 眞田 康治(2020)無人航空機の空撮画像を利用した深層学習によるオーチャードグラス個体選抜法の開発.育種学研究 22: 21–27.
- Bendig, J., A. Bolten, S. Bennertz, J. Broscheit, S. Eichfuss and G. Bareth (2014) Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging. Remote Sens. 6: 10395–10412.
- Brocks, S., J. Bendig and G. Bareth (2016) Toward an automated low-cost three-dimensional crop surface monitoring system using oblique stereo imagery from consumer-grade smart cameras. J. Appl. Remote Sens. 10: 046021.
- Chu, T.X., M.J. Starek, M.J. Brewer, S.C. Murray and L.S. Pruter (2018) Characterizing canopy height with UAS structure-from-motion photogrammetry—results analysis of a maize field trial with respect to multiple factors. Remote Sens. Lett. 9: 753–762.
- Clark, A. (2015) Pillow (PIL fork) documentation. [https://www.realmoon.net/wordpress/wp-content/uploads/2019/07/pillow.pdf].
- Colomina, I. and P. Molina (2014) Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 92: 79–97.
- GDAL/OGR contributors (2021) GDAL/OGR geospatial data abstraction software library. Open Source Geospatial Foundation. [https://gdal.org].
- GeoPy Contributors (2020) Welcome to GeoPy’s documentation. [https://geopy.readthedocs.io/en/stable/].
- Harris, C.R., K.J. Millman, S.J. van der Walt, R. Gommers, P. Virtanen, D. Cournapeau, E. Wieser, J. Taylor, S. Berg, N.J. Smith et al. (2020) Array programming with NumPy. Nature 585: 357–362.
- Hartley, R.I. and A. Zisserman (2003) Multiple View Geometry in Computer Vision, 2nd Edition, Cambridge University Press, Cambridge.
- Holman, F.H., A.B. Riche, A. Michalski, M. Castle, M.J. Wooster and M.J. Hawkesford (2016) High throughput field phenotyping of wheat plant height and growth rate in field plot trials using UAV based remote sensing. Remote Sens. 8: 1031.
- James, M.R. and S. Robson (2014) Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 39: 1413–1420.
- Jiang, Q., S.H. Fang, Y. Peng, Y. Gong, R.S. Zhu, X.T. Wu, Y. Ma, B. Duan and J. Liu (2019) UAV-based biomass estimation for rice-combining spectral, TIN-based structural and meteorological features. Remote Sens. 11: 890.
- Joel, L. (2021) GeospatialPython/pyshp: This library reads and writes ESRI Shapefiles in pure Python. [https://github.com/GeospatialPython/pyshp].
- 神野有生・八田滉平・福元和真・田村尚也・宮﨑真弘・米原千絵・浦川貴季・清水隆博・炭田英俊(2019)UAV写真測量のSfMにおける斜め撮影の効率的配置,標定点の省略可能性,水の影響と対策に関する検討.日本写真測量学会令和元年度年次学術講演会.
- Kawamura, K., H. Asai, T. Yasuda, P. Khanthavong, P. Soisouvanh and S. Phongchanmixay (2020) Field phenotyping of plant height in an upland rice field in Laos using low-cost small unmanned aerial vehicles (UAVs). Plant Prod. Sci. 23: 452–465.
- 黄川田 智洋・ 眞田 康治・ 佐藤 尚・ 秋山 征夫(2020)UAV(ドローン)と画像解析法によって得られる植生指標relative Green Red Vegetation Index(rGRVI)の飼料用トウモロコシすす紋病およびごま葉枯病罹病程度評価への応用. 日草誌 66: 8–16.
- Kurz, C., T. Thormählen and H.P. Seidel (2011) Bundle Adjustment for Stereoscopic 3D. In “Computer Vision/Computer Graphics Collaboration Techniques. MIRAGE 2011. Lecture Notes in Computer Science, vol 6930” Gagalowicz, A. and W. Philips (eds.), Springer, Berlin, Heidelberg, 1–12.
- Li, W., Z. Niu, H.Y. Chen, D. Li, M.Q. Wu and W. Zhao (2016) Remote estimation of canopy height and aboveground biomass of maize using high-resolution stereo images from a low-cost unmanned aerial vehicle system. Ecol. Indic. 67: 637–648.
- Madec, S., F. Baret, B. deSolan, S. Thomas, D. Dutartre, S. Jezequel, M. Hemmerle, G. Colombeau and A. Comar (2017) High-throughput phenotyping of plant height: comparing unmanned aerial vehicles and ground LiDAR estimates. Front. Plant Sci. 8: 2002.
- 小花和 宏之・ 坂上 清一・ 八木 隆徳(2019)RTK-UAVを用いた地形計測の測位性能および省力効果.地形 40: 125–134.
- Obanawa, H., R. Yoshitoshi, N. Watanabe and S. Sakanoue (2020) Portable LiDAR-based method for improvement of grass height measurement accuracy: comparison with SfM methods. Sensors 20: 11.
- Python Software Foundation (2018) Python Release Python 3.6.8 | Python.org. [https://www.python.org/downloads/release/python-368/].
- QGIS.org (2021) QGIS Geographic Information System. QGIS Association. [http://www.qgis.org].
- Rosnell, T. and E. Honkavaara (2012) Point cloud generation from aerial image data acquired by a quadrocopter type micro unmanned aerial vehicle and a digital still camera. Sensors 12: 453–480.
- The pandas development team (2020) pandas-dev/pandas: Pandas. [https://zenodo.org/record/4394318#.YAD7U-j7SU].
- Tsouros, D.C., S. Bibi and P.G. Sarigiannidis (2019) A review on UAV-based applications for precision agriculture. Information 10: 349.
- Watanabe, K., W. Guo, K. Arai, H. Takanashi, H. Kajiya-Kanegae, M. Kobayashi, K. Yano, T. Tokunaga, T. Fujiwara, N. Tsutsumi et al. (2017) High-throughput phenotyping of sorghum plant height using an unmanned aerial vehicle and its application to genomic prediction modeling. Front. Plant Sci. 8: 11.
- Yao, H., R.J. Qin and X.Y. Chen (2019) Unmanned aerial vehicle for remote sensing applications—a review. Remote Sens. 11: 22.