Reviews
Advances in gravity analyses for studying volcanoes and earthquakes
2020 年 96 巻 2 号 p. 50-69
詳細
2020 年 96 巻 2 号 p. 50-69
This report highlights the usefulness and applicability of various gravimetric methods for studying earthquakes and volcanic activities. A high-resolution gravity anomaly map of Japan reveals areas with very steep horizontal gradients, where potential seismic faults are likely to be buried. Such traditional geoprospecting is coupled with novel cosmic-ray radiography to produce a fine-resolution (<100 m) three-dimensional density structure of a volcano. On the other hand, temporal gravity changes provide invaluable information about the process of earthquake faulting, volcanic eruptions, caldera formation, etc. Specifically, in this report we present our previous work on gravity research for solid earth science: (1) the first detection of coseismic gravity changes, (2) the virtual visualization of the rising and falling of magma in a conduit of Asama volcano, and (3) the large-scale lateral movement of magma during the Miyake-jima eruption in 2000.
Earth’s gravitational acceleration, also known as terrestrial gravity, has been one of the most fundamental geophysical observables since Richer (1679)1) found (by observing the pendulum periods) that it is dependent on latitude. Specifically, a pendulum clock adjusted in Paris (located at a latitude of ∼49°N) retarded by 2 min/day when it arrived in French Guiana (located at a latitude of ∼5°N);1) it was concluded that lower gravitational acceleration at lower latitudes resulted in an increased pendulum period. Newton pointed out that this is evidence that the Earth is oblate and not prolate due to larger centrifugal force at lower latitudes. The measurement accuracy of surface gravity g0 was on the order of 10−5g0 in the 17th century and has steadily improved during the previous 300 years, primarily because of the development of absolute gravimeters.2),3) The current absolute gravimeters yield gravitational acceleration values as accurate as 10−9g0, i.e., 1 µGal (1 × 10−6 cm/s2), under laboratory conditions,4),5) whereas the relative gravimeters measure the gravity difference between two points with an accuracy of 10 µGal or better under field conditions.6) The mobile relative measurements combined with an absolute measurement at a reference point, i.e., the hybrid gravity measurement method proposed by Okubo et al. (2002),7) paved the way for studying various geophysical phenomena, including earthquakes, volcanic eruptions, and tectonic processes such as mountain formation and postglacial isostatic adjustment.8)
Gravimetry can contribute to Earth science in two significant ways. The first contribution is the elucidation of the subsurface density structure from the spatial gravity variations on the Earth’s surface. For this purpose, gravity anomalies, i.e., deviations of the measured gravity from that of the reference field, have been used for prospecting the subsurface density inhomogeneities of geophysical and geological interest. For example, Yokoyama (1963)9) suggested various caldera formation processes by studying the gravity anomalies around volcanoes. Fukao et al. (1989)10) measured and compiled the gravity anomalies across the Peruvian Andes, which provided important observational constraints on the formation of the Andes.11)
The second contribution is the clarification of geodynamic processes based on the temporal gravity changes. Although there have been numerous reports on gravity changes that have arisen from earthquakes and volcanic activity, these reports were based on relative gravity measurements with certain ambiguities until the research team of the author detected the absolute gravity changes by performing hybrid gravity measurements. Tanaka et al. (2001)12) and Furuya et al. (2003)13) were the first to detect the absolute gravity changes during earthquakes and volcanic activity, respectively.
In this report, we will briefly summarize the achievements related to these two topics. Section 2 describes static studies on the geoprospecting of a volcano and a seismic fault. Section 3 deals with the temporal gravity changes observed during an earthquake. In section 4, we introduce the progress of terrestrial gravity studies with special emphasis on volcanic research because the gravity changes play a unique role in detecting the mass transport. Section 5 summarizes the main points of this report, limitations and advantages of the discussed techniques, and directions for conducting future research.
The shape of the Earth is very close to an oblate ellipsoid of revolution with equatorial and polar radii of a = 6378.137 km and b ≈ 6356.752 km, respectively, following the convention of the International Union of Geodesy and Geophysics. The gravity at geographical latitude φ at the sea level is sufficiently modeled by the normal gravity, defined as
| \begin{equation} \gamma (\varphi) = \frac{(a\,\gamma_{a}\cos^{2}\varphi + b\,\gamma_{b}\sin^{2}\varphi)}{\sqrt{a^{2}\cos^{2}\varphi + b^{2}\sin^{2}\varphi}}, \end{equation} | [1] |
The gravity anomaly (Bouguer anomaly) mentioned in the previous section9),10) can be defined as
| \begin{align} \Delta g(A) &= g_{\textit{obs}}(A) - [\gamma (\varphi ) - \gamma' h(A) \\ &\quad + 2\pi G\rho h(A) - T_{c}(A)] \end{align} | [2] |
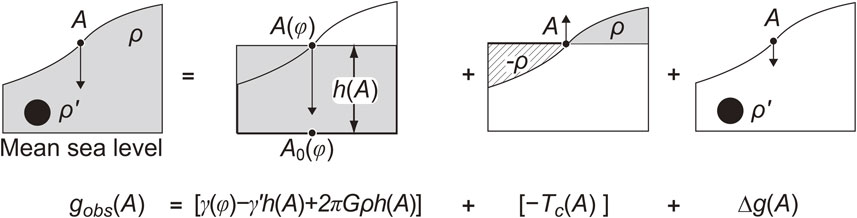
The gravity anomaly Δg. Terrestrial gravity gobs at point A on the surface is decomposed into (1) γ, the normal gravity at the mean sea level A0 at latitude φ, (2) −γ′h, the normal gravity difference between A and A0, (3) 2πGρh, the attraction of an infinitely large flat plate of thickness h with density ρ, (4) −Tc, the topographic correction, and (5) Δg, the attraction of a subsurface body with an anomalous density. Note that we may always take both γ′ and Tc(A) to be positive because we consider downward to be the positive direction for terrestrial gravity.
The local gravity anomalies around volcanoes and seismic faults are usually within ±100 mGal or 10−4g0. Based on various features of a gravity anomaly map, such as the one compiled by Shichi (2019)15) (Fig. 2a), the geometries and density contrasts of the subsurface bodies can be estimated. For example, the very steep horizontal gravity gradient running from the Awaji Island to Kobe (Fig. 2b) strongly suggests the existence of a subsurface fault with a large density contrast in the NW–SE direction. Kobayashi et al. (1996)16) quantitatively analyzed the gravity anomaly to determine the density structure using two-dimensional (2D) forward modeling.17) Their results (Figs. 2c and 2d) clarify the subsurface fault between the Rokko granite and Osaka formation, which most probably slipped during the 1995 Kobe earthquake, leading to a death toll of more than 6000.
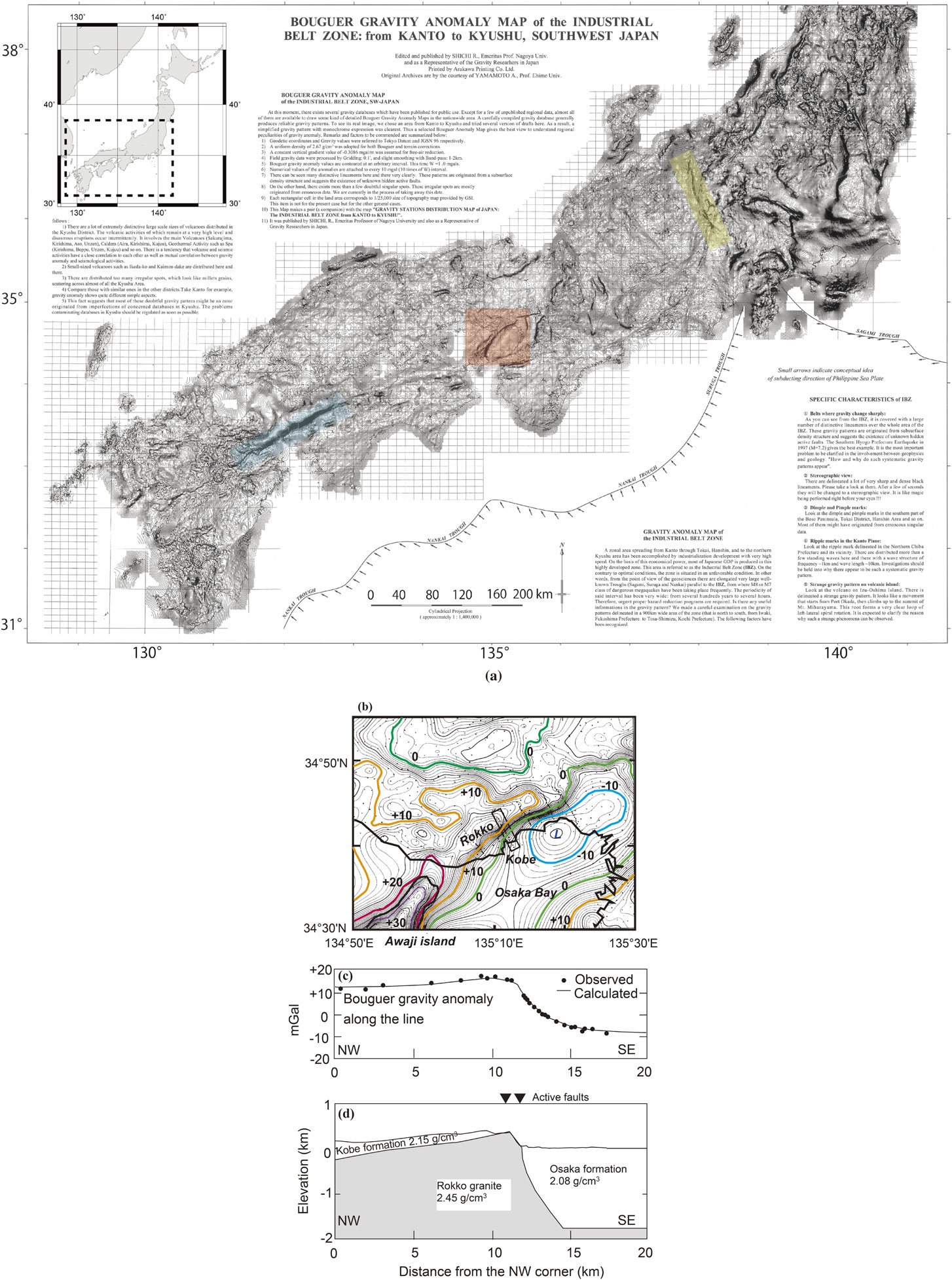
(a) Gravity anomalies in the southwest to central parts of Japan. Contour lines are drawn every 1 mGal. Steep horizontal gradient zones are clearly observable along the Median Tectonic Line (blue), the Itoigawa–Shizuoka Tectonic Line (yellow), and the fault zone of the 1995 Kobe earthquake (red). Redrawing of the original figure after Shichi (2019).15)
(b) Gravity anomalies around Kobe, where the M7 Kobe earthquake resulted in more than 6000 fatalities. The units are mGal, and the contours are drawn every 1 mGal. (c) Projection of the gravity anomalies along the rectangle in Fig. 2b around Kobe. (d) Subsurface density model beneath the rectangle in Fig. 2b derived from the gravity anomalies.
The gravity analysis explained in section 2.1 is based on forward modeling. In this approach, a density model consistent with the observed gravity anomalies is searched for while considering the geophysical and geological constraints. However, the derived density model is not unique because there are numerous models that explain the gravity anomalies equally well. A trivial example is that the constant gravity g0 on a sphere of radius a can be explained by a uniform sphere or a uniform spherical shell if they have the same mass M = g0a2/G. Thus, the gravity data impose important constraints on the subsurface density distribution but the density structure estimated based on gravity anomalies alone is not free from the ambiguity inherent in any potential field such as the geomagnetic field.18),19) To meaningfully interpret the gravity anomalies, additional geophysical information derived from seismic and geomagnetic/electric explorations as well as geological constraints is often necessary. The simultaneous inversion of gravity anomalies and seismic data is the most commonly used approach. However, it is not entirely free from ambiguities because it is necessary to assume an ad hoc relationship between the density and seismic P- and S-wave velocities. To circumvent this difficulty, we need observables other than gravity that are primarily sensitive to density. One of the candidates is the cosmic-ray flux penetrating a rock body. In the following section, we briefly describe the principle of cosmic-ray imaging and show how it can be integrated with gravity observations for three-dimensional (3D) density imaging.
2.3. Cosmic-ray radiography and its integrated analysis with gravity anomalies.The first cosmic-ray muon image of the inside of a volcano was acquired in a pioneering study by Tanaka et al. (2007).20) Tanaka and Yokoyama (2008)21) named the imaging technique muon radiography and applied it to probe the inside of Showa-shinzan volcano located in Hokkaido, Japan. In this approach, the absorption of cosmic-ray muons, as they penetrate rocks on their paths to a sensor on the ground, is measured (Fig. 3). The attenuation of the muon flux is governed by the density length X, defined as
| \begin{equation} X(\theta,\lambda) \equiv \int_{T} \rho (l, \theta, \lambda) dl = \bar{\rho} (\theta, \lambda) \cdot L (\theta,\lambda), \end{equation} | [3] |
| \begin{equation} L (\theta,\lambda) = \int_{T} dl, \end{equation} | [4] |
| \begin{equation} \bar{\rho} (\theta, \lambda) = X(\theta,\lambda)/L (\theta,\lambda), \end{equation} | [5] |

Principle of cosmic-ray radiography. The figure shows a profile with a specific azimuth λ0. The flux of muons reaching the ground sensor from the zenith angle θ and azimuth λ0, Nrec, depends on the density ρ and the travel distance L along the path in the target. We may compute the density length X by comparing Nrec with the known incidence flux Nin.
The image of the muon radiographic density $\bar{\rho }(\theta ,\lambda )$ of a target can be compared to an X-ray snapshot. We should note here that a cosmic-ray image acquired by a sensor on the ground is a 2D section image averaged along the cosmic-ray paths to the sensor rather than a 3D density image. A simulation study showed that at least 16 2D muon radiographic images captured from independent directions are necessary to reconstruct a 3D density model of a target with a reasonable resolution.23) However, it is not practical to evenly distribute many muon detectors around a volcano having a rugged topography. Because long-term electric power supply is not feasible for such conditions, there is no alternative but to use the emulsion plates as muon detectors. However, in general, with an increasing number of muon detectors on the ground, more time is needed to scan and process the muon trajectories on the emulsion plates. An easier 3D density reconstruction method was expected, and Nishiyama et al. (2014)24) presented a breakthrough with respect to this problem, noting that both muon absorption and gravity are sensitive to the internal density structure. Specifically, they proposed the simultaneous inversion of the 2D muon radiographic data and gravity anomalies to obtain the 3D density structure (Fig. 4). They began by dividing a target volcano into N voxels with density ρj (j = 1,2,…, N). The gravity anomaly at the i-th gravity station on the ground at (xi, yi, zi) can be expressed as
| \begin{equation} \Delta g_{i} \equiv \Delta g(x_{i},y_{i},z_{i}) = \sum_{j = 1}^{N}G_{ij}\rho_{j};\ i = 1,2, \ldots ,N_{G} \end{equation} | [6] |
| \begin{equation} G_{ij} = G\iiint \frac{(z_{i} - z_{j})}{\left(\sqrt{(x_{i} - x_{j})^{2} + (y_{i} - y_{j})^{2} + (z_{i} - z_{j})^{2}}\right)^{3}}dV. \end{equation} | [7] |
| \begin{equation} X_{k} = \sum_{j = 1}^{N}L_{kj}\rho_{j};\ k = 1,2, \ldots,N_{C}, \end{equation} | [8] |
| \begin{equation} \vec{d} = \tilde{\text{A}}\vec{\rho}, \end{equation} | [9] |
| \begin{align} \vec{d} &= (\Delta g_{1},\Delta g_{2}, \ldots,\Delta g_{N_{G}},X_{1,}X_{2,}, \ldots,X_{N_{C},})^{t},\\ \tilde{A} &= (\tilde{G},\tilde{L})^{t},\ \vec{\rho} = (\rho_{1},\rho_{1}, \ldots,\rho_{N})^{t}. \end{align} | [10] |
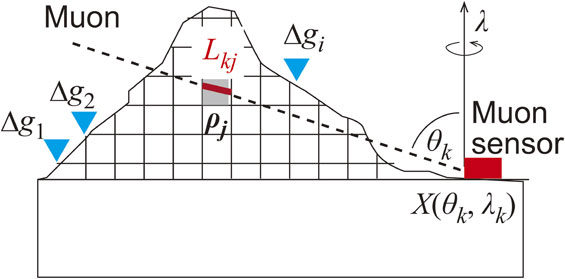
Principle of 3D density modeling by integrating the cosmic-ray radiography and gravity anomaly analysis. The density of each voxel is determined such that it simultaneously satisfies the muon flux and gravity anomalies. The flux of muons X(θk, λk) coming from the zenith angle θk and azimuth λk is dependent on the density ρj and travel distance Lkj along the path in the j-th voxel. The contribution of the j-th voxel to Δgi, the gravity anomaly at the i-th point, is Gij in Eq. [6].
Solving Eq. [9] for the voxel density $\vec{\rho }$ is a linear inverse problem. Nishiyama et al. (2016)25) applied this method to Showa-shinzan lava dome, Hokkaido, Japan and imaged its interior with unprecedented high resolutions of 0.1 and 0.2 km in the vertical and horizontal directions, respectively (Fig. 5). The resulting 3D image exhibits remarkable improvement when compared with the 2D section image.21) It clearly shows a cylindrical column of massive matter with a diameter of 300 m oriented vertically, rising to the top of the lava dome (Fig. 5). This technique is widely applied to study the interiors of volcanoes worldwide such as La Soufrière de Guadeloupe.26)

Showa-shinzan lava dome (left, courtesy of Dr. Ryuichi Nishiyama) and 3D representation of the density model (right) derived from the integrated analysis of the gravimetry and muon radiography, redrawing Fig. 6 of Nishiyama et al. (2016).25) The gravity points are shown using red solid squares, whereas the muon trajectories are drawn using blue lines.
From the geophysical point of view, most earthquakes can be reasonably modeled in terms of a dislocation embedded in an elastic medium. Consequently, we can formulate the gravity changes as well as crustal deformations (i.e., displacements, tilt, and strains of the ground) in the framework of the dislocation theory.27),28) In the following subsections, we will provide an overview of the theoretical and observational results with respect to the gravity changes for several important cases.
3.1. Gravity changes excited by a large earthquake when magnitude M < 8.The terrestrial gravity field changes when a large earthquake occurs partly because the slip motion on the fault causes compression/dilation of the rocks around the fault and partly because the observation points are raised/lowered in space. The former necessarily causes a density change based on whether the rocks are compressed or dilated. The latter is the result of measuring the gravity at different points in space before and after an earthquake, provided that they are fixed on the deformable ground surface. Considering these two factors, Okubo (1992)29) derived formulas for the gravity and potential changes (Δg and ΔΨ, respectively) due to faulting on a finite rectangular plane in a homogeneous half-space (Fig. 6). These equations are useful for estimating Δg when the curvature of the Earth and the inhomogeneity of physical constants can be reasonably ignored. This is the case for large earthquakes having moment magnitudes of less than 8 because their fault dimensions are usually several tens of kilometers or less. Using the Cartesian coordinates (x1, x2, x3), Δg at a point (x1, x2, x3 = 0) fixed on the ground can be expressed as
| \begin{align} &\Delta g (x_{1}, x_{2}) \\ &\quad = \{\rho G [U_{1}S_{g} (\xi, \eta) + U_{2}D_{g} (\xi, \eta) + U_{3} T_{g} (\xi, \eta )]\\ &\qquad + (\rho' - \rho )GU_{3}C_{g} (\xi, \eta)\}{\parallel}-\beta\Delta h (x_{1}, x_{2}), \end{align} | [11] |
| \begin{align} &\Delta \mathit{h} (x_{1}, x_{2}) \\ &\quad= [U_{1}S_{h} (\xi, \eta) + U_{2}D_{h} (\xi, \eta) + U_{3}T_{h} (\xi, \eta)]{\parallel}, \end{align} | [12] |
| \begin{align} f(\xi, \eta){\parallel} &\equiv f (x_{1}, p) - f (x_{1}, p - W) \\ &\quad - f (x_{1} - L, p) + f (x_{1} - L, p - W), \end{align} | [13] |
| \begin{equation} p \equiv x_{2} \cos \delta + d \sin \delta, \end{equation} | [14] |
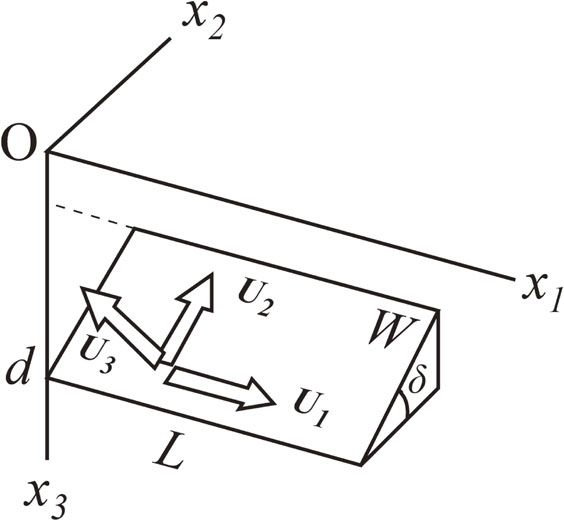
A rectangular fault of length L and width W embedded in a homogeneous half-space with a dip angle of δ. U1, U2, and U3 denote the strike-slip, dip-slip, and tensile opening components, respectively.
The theoretical coseismic gravity change was observationally tested by Tanaka et al. (2001)12) against the gravity changes observed during the Shizukuishi earthquake on September 3, 1998 (M6.1) by fulfilling all the technical requirements to verify the theory. They showed that the observed spatiotemporal gravity variations agreed remarkably well with those expected from Eqs. [11]–[14] when the fault parameters were estimated from the displacement data alone without using the gravity changes (Fig. 7). This was the first unequivocal detection of coseismic gravity changes and confirmed the validity of the theory. Currently, these expressions have been implemented in an earthquake simulator in California.31)
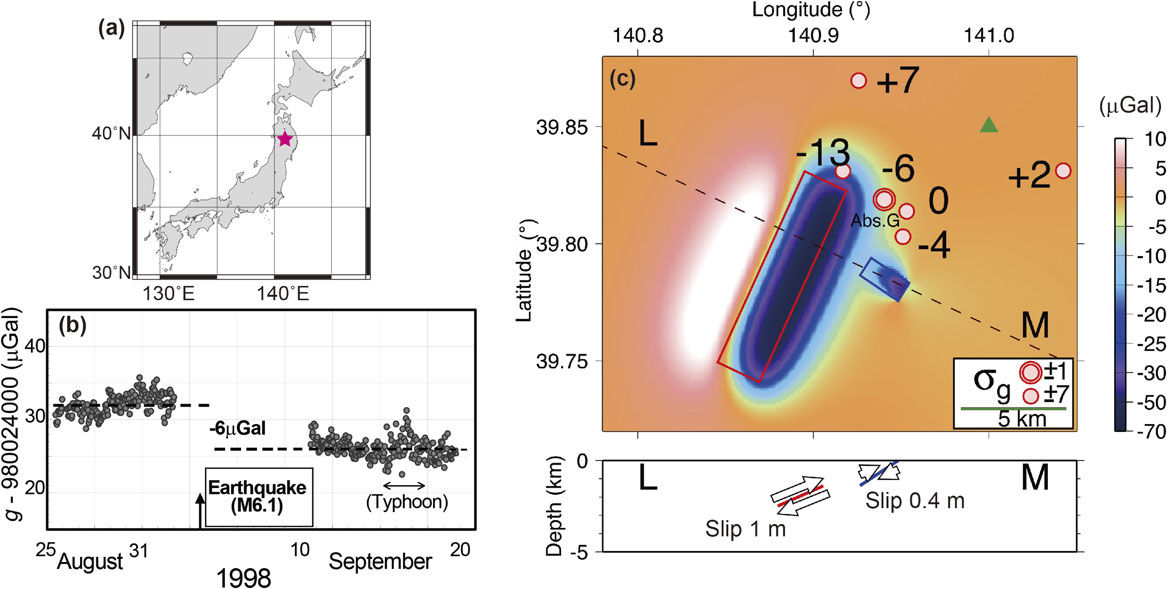
Gravity changes during the Shizukuishi earthquake (redrawing of the original figures from Tanaka et al. (2001)12)). (a) Epicenter is denoted using a red star. (b) Absolute gravity change during the earthquake. The measurement error is approximately 1–2 µGal. (c) (Top) Theoretical gravity changes (colors) and observed gravity changes (figures) during the M6.1 earthquake (the units are µGal), where σg denotes the measurement error. The blue and red rectangles are the faults projected on the surface. (Bottom) Cross-section along L–M viewed from the southwest. The slips on the larger and smaller faults are 1 and 0.4 m, respectively.
Estimation of the regional- to global-scale gravity changes excited by a great earthquake requires the consideration of the curvature and radial inhomogeneity of the Earth32) because they have unusually large fault areas covering several thousand square kilometers.33) For example, the fault length L and width W of the 2011 Tohoku earthquake were 500 and 200 km, respectively.34),35) A fault length greater than 100 km implies that significant displacement and gravity changes are imposed beyond the epicentral distance of a few hundred kilometers and that the Earth can no longer be approximated to be flat. In addition, the density and elastic moduli vary significantly with depth along a fault because it penetrates the boundary between the crust and mantle located at a depth of 10–30 km.
Sun and Okubo (1993)36) was the first who succeeded in obtaining the theoretical coseismic gravity changes for a spherically symmetric, nonrotating, perfectly elastic, and isotropic (SNREI) Earth with self-gravitation. They presented a set of Green’s functions {Gij(Ds, θ, λ); i, j = 1, 2, 3} describing the global gravity changes due to the dislocations of a unit seismic moment located on the polar axis (Fig. 8). Once the set of Green’s functions {Gij; i, j = 1, 2, 3} has been computed, the gravity change Δg due to an earthquake can be easily estimated through numerical integration over the fault surface S as follows:37)
| \begin{equation} \Delta g(\theta, \lambda) = \iint\nolimits_{s}G_{ij}(D_{s},\Theta,\Lambda)[\mu\ u_{i}\ n_{j}](\theta',\lambda')dS(\theta',\lambda'), \end{equation} | [15] |
| \begin{equation} \cos\Theta = \cos\theta\cos\theta' + \sin\theta\sin\theta'\cos(\lambda' - \lambda), \end{equation} | [16] |
| \begin{equation} \sin\Theta\sin\Lambda = \sin\theta'\sin(\lambda - \lambda'), \end{equation} | [17] |
| \begin{equation} \sin\Theta\cos\Lambda \sin\theta' = \cos\theta - \cos\theta'\cos\Theta. \end{equation} | [18] |
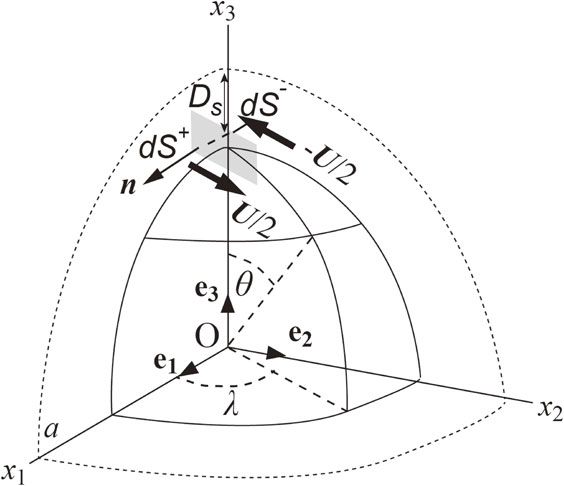
Point dislocation on the polar axis for the SNREI Earth. The dislocation vector U is assumed on an infinitely small rectangle defined by a normal vector n and area dS ≪ 1. Ds and a denote the source depth and the Earth’s radius, respectively.
It took ten years for the theory of Sun and Okubo to be verified by the observations of Imanishi et al. (2004),38) who detected the regional gravity changes during the 2003 Tokachi-oki earthquake (M8.0) using an array of superconducting gravimeters (SGs) (Fig. 9). In a series of studies, the author’s research group predicted that great earthquakes cause gravity changes on regional to global scales exceeding the signal level of modern satellite gravity missions.39)–41) In fact, the GRACE (Gravity Recovery and Climate Experiment) satellite mission42) detected significant gravity changes during the 2004 Indian Ocean earthquake off the coast of Sumatra, Indonesia (M9.1), the 2010 Maule earthquake in central Chile (M8.8), and the 2011 Tohoku earthquake in Japan (M9.1) consistent with the theoretical expectations according to Eq. [15].43)–45)
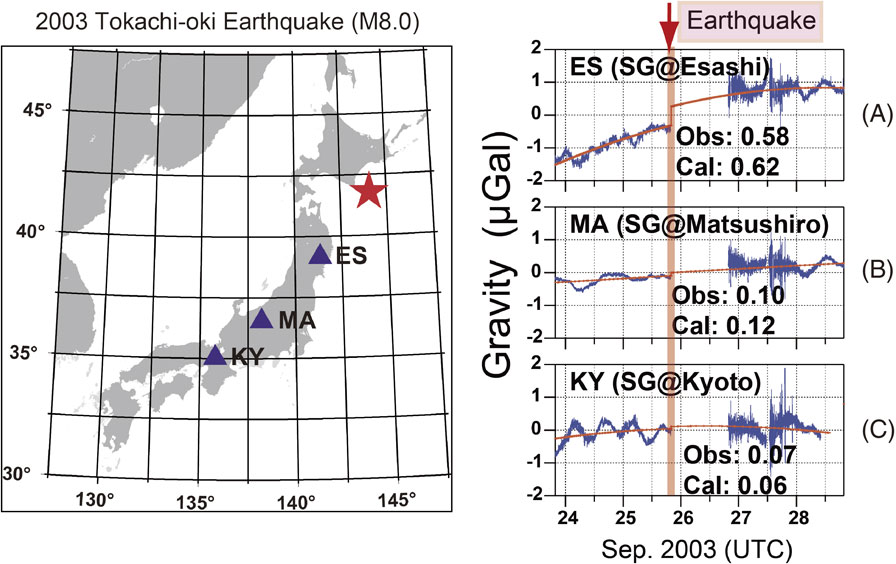
Regional gravity changes detected with an array of SGs (redrawing of the original figures from Imanishi et al. (2004)38)). The units are µGal. (Left) Epicenter (a red star) of the 2003 Tokachi-oki earthquake and the SG station locations (triangles). ES, Esashi; MA, Matsushiro; KY, Kyoto. (Right) Gravity data (blue) recorded by SGs for the Tokachi-oki earthquake in 2003. The units are µGal. (A) Esashi, (B) Matsushiro, and (C) Kyoto. The red curves are the smoothed values obtained by considering the coseismic gravity steps and instrumental long-term drift.
A volcanic eruption can be defined as the ejection of liquid or solid matter, such as lava and tephra, from the ground through vents. The most familiar type of eruption is summit eruption, in which a crater located around the center of the edifice serves as the vent. If an eruption occurs on the sides located at a considerable distance from the summit, it may be called a flank eruption. The other important type of eruption is a fissure eruption, in which magmatic matter is ejected from the vents along a line on the ground extending for many kilometers. Fissure eruptions are often found at places where the tensile tectonic stress is dominant, as in rift valleys and mid-oceanic ridges.
Physical models of these eruptions usually comprise several components: (1) an inflating or deflating magma chamber located at a depth of 1 to 10 km, (2) a conduit, serving as a pathway for the magma from the chamber to the surface, and (3) a dike connecting the magma chamber to linear fissures on the ground. In the following subsections, we will integrate these components to discuss the gravity changes and crustal deformations from the theoretical and observational perspectives.
4.2. Summit/flank eruption — modeling with a blocked conduit coupled to a magma chamber.The volcano deformation preceding a summit or flank eruption can be modeled by assuming a coupled magma chamber and conduit. As the conduit is usually blocked or plugged with solidified magma until the moment of eruption, the overpressure ΔP builds up effectively in the magma chamber when magma is fed from below or volcanic gases exsolve from the melt in the chamber. As a first approximation, the crustal deformation can be analyzed using the Mogi model.46) It assumes a spherical pressurized source embedded in a homogeneous elastic half-space, ignoring the conduit deformation. If the source radius a is considerably less than the source depth D, the elastic displacements (ur, uθ, uz) on the surface are given by Yamakawa (1955)47) as
| \begin{equation} \vec{u} = (u_{r},u_{\theta},u_{z}) = \frac{(1 - \nu)\Delta P}{\mu} \frac{a^{3}}{(r^{2} + D^{2})^{\frac{3}{2}}}\quad (r,0,D), \end{equation} | [19] |
| \begin{equation} (u_{r},u_{\theta},u_{z}) = \frac{(1 - \nu)}{\pi}\frac{\Delta V}{(r^{2} + D^{2})^{\frac{3}{2}}}\quad (r,0,D). \end{equation} | [20] |
| \begin{equation} t = -\frac{\partial u_{z}}{\partial r},\quad \varepsilon = \frac{\partial u_{r}}{\partial r}. \end{equation} | [21] |
The surface gravity change Δg measured at a fixed point on the ground comprises the following four contributions: (1) the free-air gravity change due to the uplift of the observation point uz; (2) the attraction of the surface mass distribution (single layer) originating from the deformed ground having density ρ and thickness uz; (3) the attraction from the perturbed density field ($ - \rho \,\text{div}\,\vec{u})$ within the Earth; and (4) the direct attraction of the mass transported to/from the magma reservoir ΔM. Hagiwara (1977)48) provided analytical solutions for each aforementioned contribution. The resulting total gravity change on the surface can be expressed as
| \begin{equation} \Delta g(r) = -\beta u_{z}(r) + G\Delta M\frac{D}{(r^{2} + D^{2})^{\frac{3}{2}}}, \end{equation} | [22] |
| \begin{equation} \Delta M = \rho_{0}\Delta V = \rho_{0}\left(\frac{\pi}{1 - \nu}\right)\frac{(r^{2} + D^{2})^{\frac{3}{2}}}{D}u_{z}(r), \end{equation} | [23] |
| \begin{equation} \Delta g(r) = \left(- \beta + \frac{\rho_{0}\pi G}{1 - \nu}\right)u_{z}(r). \end{equation} | [24] |
If bubble formation of volatile gases in the magma chamber is responsible for the inflation, the ratio of the gravity change to uplift yields
| \begin{equation} \frac{\Delta g(r)}{u_{z}(r)} \sim -\beta = -0.31\,\text{mGal/m} \end{equation} | [25] |
| \begin{equation} \frac{\Delta g(r)}{u_{z}(r)} = -0.23\,\text{mGal/m} \end{equation} | [26] |
After the volcanic mass (lava, tephra, and gases) is ejected from a summit or flank crater during an eruption, the overpressure ΔP is lowered and the volcano usually undergoes deflation. Although the conduit is no longer blocked, Eqs. [19]–[23] still provide an appropriate model for computing the deformation and gravity changes during the eruption by considering negative values of ΔP and ΔV to model the deflating magma chamber. This formulation will be used to analyze the gravity change for a deflating pressure source in section 4.5.
4.3. Continual summit/flank eruption — modeling with an open conduit coupled to a magma chamber.Volcanic eruptions often occur continually from the same crater for periods ranging from a month to years, as was the case for the volcanic activities of Asama volcano, Honshu, Japan in 2004 and Sakura-jima volcano from 2009 to 2016. Continual Vulcanian explosions from the same crater strongly suggest that the conduit is mostly open, implying that the overpressure inside the magma chamber is continually released at the surface. This results in only minor crustal deformation but the gravity changes can still be as large as those in the cases of blocked conduits, as can be observed below.
Let us now consider magma rising in a conduit open at the top. As a first approximation, we may assume a vertical open pipe of radius apipe linked to a pressurized sphere of radius asph embedded at depth Dsph in an elastic half-space of rigidity μ (Fig. 10).49) The pipe represents the conduit, whereas the sphere corresponds to the magma chamber. We assume that the pipe is initially filled with magma up to an elevation of Hhead. When magma of density ρ is supplied to the system from below by volume ΔVinflow, a uniform pressure change ΔP is expected in the sphere and most of the pipe. In the newly filled portion of the pipe, the pressure linearly decreases with the elevation. Ignoring the compressibility of the magma, we obtain
| \begin{equation} \Delta V_{\textit{inflow}} = \Delta V_{\textit{head}} + \Delta V_{\textit{pipe}} + \Delta V_{\textit{sph}} \end{equation} | [27] |
| \begin{equation} \Delta V_{\textit{head}} = \pi a_{\textit{pipe}}^{2}\Delta H_{\textit{head}}, \end{equation} | [28] |
| \begin{equation} \Delta V_{\textit{pipe}} = 2\pi a_{\textit{pipe}}\Delta a_{\textit{pipe}}(D_{\textit{sph}} + H_{\textit{head}}), \end{equation} | [29] |
| \begin{equation} \Delta V_{\textit{sph}} = 4\pi a_{\textit{sph}}^{2}\Delta a_{\textit{sph}}, \end{equation} | [30] |
| \begin{equation} \Delta a_{\textit{pipe}} = \frac{a_{\textit{pipe}}\Delta P}{\mu},\ \Delta a_{\textit{sph}} = \frac{a_{\textit{sph}}\Delta P}{4\mu}, \end{equation} | [31] |
| \begin{equation} \frac{\Delta V_{\textit{head}}}{\Delta V_{\textit{inflow}}} = 0.946,\ \frac{\Delta V_{\textit{pipe}}}{\Delta V_{\textit{inflow}}} = 0.016,\ \frac{\Delta V_{\textit{sph}}}{\Delta V_{\textit{inflow}}} = 0.038 \end{equation} | [32] |
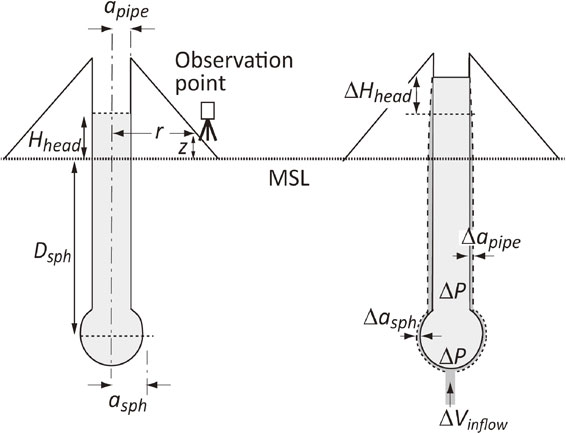
An open conduit coupled to a magma chamber modeled as a cylindrical pipe linked to a spherical pressure source. (Left) Reference state. (Right) When magma is supplied to the magma chamber, the resulting excess pressure causes elastic deformation of the pipe and sphere along with the rising magma head.
The continual summit eruptions of Asama volcano in 2004 can be successfully explained using the open conduit coupled to a magma chamber (Figs. 11a and 11b). The conduit is likely to have been opened to the free surface by the first Vulcanian eruption on September 1, 2004, which blew off the plug at the top of the conduit. Subsequent volcanic events, such as the formation of a lava cake around the vent, indicate that the conduit remained open at least throughout September 2004 (Table 1). It follows that the terrestrial gravity should vary as the magma head rises and falls in an open conduit during this period. Figure 11c shows the gravity change Δg(t) measured at 4 km from the summit since September 8, 2004. The point of greatest interest is that eruptions have always occurred when Δg(t) was decreasing to a local minimum. A simple explanation of this correlation is provided in Fig. 11d. As the magma head rises above the observation point toward the vent, the magma in the conduit attracts the gravimeter upward, partially eliminating the downward terrestrial gravity and resulting in a gravity decrease.
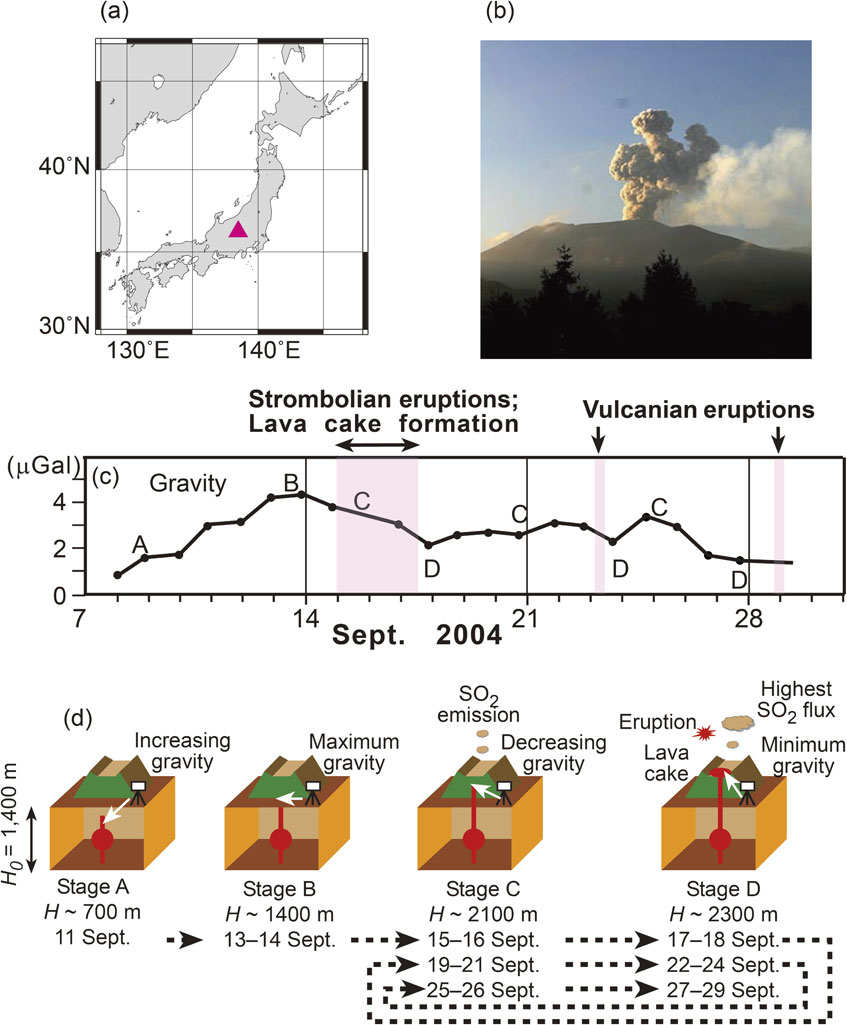
(a) Location of Asama volcano, denoted by a red triangle. (b) Eruption on September 15, 2004, 17:19 JST (courtesy of Dr. Mitsuhiro Yoshimoto). (c) Gravity variations (minus the nominal value of 979 869 900 µGal) measured at the Asama Volcano Observatory during September 2004. (d) Diagrams of the rise and fall of the magma head derived from the gravity data. The maximum gravity is observed when the magma head reaches the elevation of the gravimeter.
| Date | Event description |
|---|---|
| July–August 2004 | Gradual increase of the baseline length between two points across the summit, suggesting inflation of the edifice. |
| September 1, 2004 | First Vulcanian eruption ejecting country rocks without magmatic matter, indicating that the plug at the top of the conduit was blown off. |
| September 15–17, 2004 | Strombolian eruptions occurred continually. Lava cake was detected from a SAR (synthetic aperture radar) image on September 16, 2004. |
| September 23, 2004 | Second Vulcanian eruption. |
| September 29, 2004 | Third Vulcanian eruption. |
| October 1, 2004 | Depression found in the central part of the lava cake, suggesting drain-back of the magma in the conduit. |
| October–December 2004 | Vulcanian eruptions on October 10 and November 14, 2004. |
Let us now quantitatively evaluate the gravity change. Because the radius of the conduit a ∼ 100 m is much smaller than the horizontal distance between the conduit and the observation point L = 4000 m, the attraction of magma Δg can be appropriately expressed using the following line mass model (Fig. 12a):
| \begin{align} \Delta g(H(t)) &= \pi G\rho_{\textit{melt}}a^{2}\phi\left(\frac{1}{\sqrt{L^{2} + (H(t) - H_{0})^{2}}} - \frac{1}{L}\right) \\ &\quad + \Delta g_{0}, \end{align} | [33] |
| \begin{equation} \Delta g_{0} \equiv g(H(t) = H_{0}), \end{equation} | [34] |
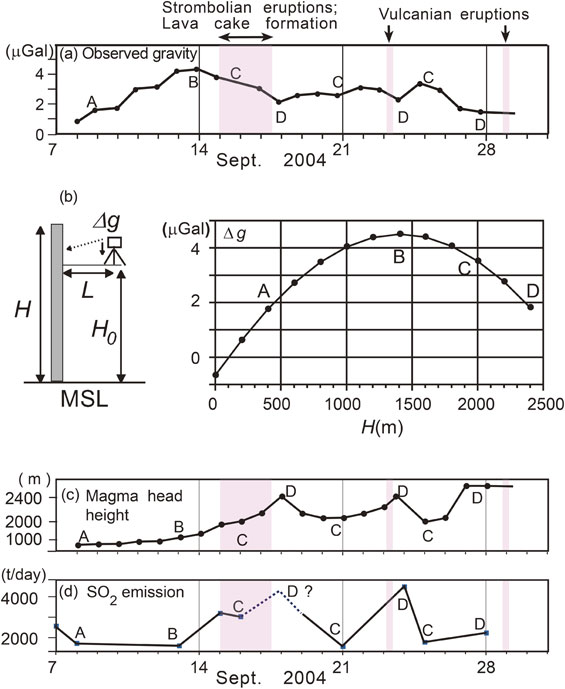
Modeling of the magma in a conduit. Labels A, B, C, and D correspond to magma head heights of 400, 1400 (observation site elevation), 2000, and 2400 m (summit elevation), respectively. (a) Gravity change. Same as Fig. 11c. (b) The line mass model used to calculate the magma head elevation. A gravimeter was installed at an elevation H0 above the MSL. The distance from the conduit to the gravimeter is L. (c) The magma head height H derived from the gravity changes, as described in Eq. [33]. (d) The SO2 emission rate measured with a compact UV spectrometer.53)
The calculated magma head height H(t) reveals the rise of the magma to the top of the vent immediately preceding the three major eruptions (Fig. 12c). Two other observations support this result. The first is the SO2 flux that was repeatedly measured using a compact UV spectrometer system.52) Compared with the emission rate of ∼100 t/day before the first eruption on September 1, 2004, an unusually high rate of several thousand t/day was observed during periods of continual Strombolian eruption (September 15–17, 2004) and the second Vulcanian eruption (September 23, 2004) (Fig. 12d).53) The active degassing during phases C–D can be well explained in our scenario (Fig. 11d) as a result of the lowered pressure at the magma/atmosphere interface when the magma head rose; SO2 exsolves from magma only under pressures of less than 2–3 MPa or equivalent to 100–150 m lithostatic or shallower below the summit.54) This concept is supported by the fact that a lava dome with a volume of 0.9 × 106 m3 appeared on the summit on September 16, 2004.55) Thus, the gravity analysis provides a tool for accurately estimating the magma head height.
4.4. Fissure eruption — modeling with dike/sill intrusion coupled to a magma chamber.Recent fissure eruptions in Japan include the 1986 Izu-Oshima eruption,56) the submarine eruption off the coast of Ito in 1989,57) and the Miyake-jima eruption in 2000.58) They are characterized by crustal deformations with mirror symmetries on a line on which fissure vents are created. The symmetry is a result of elastic deformation when a thin vertical planar sheet of magma intrudes into country rock as a dike. When the dike reaches the surface, linear or echelon fissures are created on the ground, from which lava is ejected as a curtain of fire. It follows that the tensile dislocation model discussed in section 3.1 provides an adequate mathematical framework for describing the gravity changes during fissure eruption. Therefore, it is only necessary to assume the vanishing tangential dislocation, U1 = U2 = 0, in Eqs. [11] and [12]. It should be noted here that the intrusions require mass transport from a deeper source, most likely from a magma reservoir. Consequently, dike intrusion is expected to be accompanied by magma chamber deflation. The model of a dike coupled to a magma chamber will be used in section 4.5 to analyze the gravity changes during the eruption of Miyake-jima volcano in 2000.
4.5. Hybrid gravity observation during caldera formation.A caldera is the depressed topography often found on top of a volcano. Most calderas are believed to have been formed by the collapse of the tops of volcanic cones into the space formed by an ejection or by the lateral outflow of magma during volcanic eruptions.59) However, details of the formation process are not yet well understood among volcanologists,60) primarily because such events have rarely been witnessed.61) The Miyake-jima volcanic eruption in 2000 provided a rare opportunity to study the process of caldera formation using modern observation instruments. Table 2 summarizes how the volcanic activity evolved during the first two months, following the onset of volcanic unrest.
| Date | Event description |
|---|---|
| June 26, 2000 | Onset of an earthquake swarm below Miyake-jima volcano. A significant ground tilt of ∼0.1 mrad indicated swelling of the volcano due to dike intrusion with the E–W strike.62) |
| June 27, 2000 | Submarine fissure eruption off the west coast of the island with the E–W strike. |
| June 27–July 1, 2000 | Migration of the hypocenters from the west coast toward the northwest for more than 20 km, strongly suggesting the lateral dike intrusion of magma from Miyake-jima. |
| June 28–July 7, 2000 | Gradual subsidence of the ground revealed by the tilt and GPS observations. |
| July 4–mid-August 2000 | A remarkable increase in seismicity just below the summit; hypocenters were mostly confined to a cylindrical volume of 500-m radius extending to 2500 m below the sea level.63) |
| July 8, 2000 | A small summit eruption lasting for 10 min. |
| July 9, 2000 | A pit crater of ∼800-m diameter and 100–200-m depth was found on the top, most likely due to the collapse of the summit into the cavity.64) |
| July 10–September 30, 2000 | Growth of the crater to form a caldera of 1.6 km diameter and 500-m depth.63) |
Modern hybrid gravity measurements were performed on Miyake-jima volcano to reveal the gravity changes from June 1998 to July 6, 2000.65),66) The results are intriguing because decreases in gravity by as much as 145 µGal were found in the summit area only two days before the collapse on July 8, 2000 (Fig. 13b). Further, a significant gravity increase of approximately 100 µGal was observed on the west coast, where fissures were found on the ground along the line of the offshore submarine eruption vents. The author’s research group postulated an integrated physical model comprising (1) a dike responsible for the fissure eruption on June 28, 2000 and the migrating earthquake swarm, (2) a deflating magma chamber linked to the dike, and (3) a cavity created by stoping beneath the summit when magma flowed out of the chamber. By assigning reasonable values to the parameters (Table 3, Fig. 13d), the three-element model reproduces the observed gravity change (Figs. 13b and 13c) and ground displacements detected by GPS.65),66) Because the spherical cavity with a radius of ∼240 m (Table 3) is comparable in size to the fresh pit crater (∼800-m diameter) found on July 9, 2000 (Table 2, Fig. 13d), the significant gravity decrease in the summit area demonstrates the presence of a cavity before the collapse of the summit. The cavity is likely to serve as a seed for the growing caldera.

Volcanism of Miyake-jima in 2000. (a) Location of Miyake-jima volcano, indicated by a red triangle. (b) The observed gravity changes two days before the caldera collapse on July 8, 2000. The reference gravity was measured in June 1998. (c) The expected gravity changes based on the physical model given in Table 3. (d) Diagram of the physical model inferred based on the gravity and crustal deformation data. (e) Photo captured on July 9, 2000 after the collapse of the summit (courtesy of Prof. Setsuya Nakada).
| Deflating sphere | |
| Depth | 5.3 ± 0.45 km |
| Volume change | −8.7 ± 0.5 × 107 m3 |
| Density | 2600 kg/m3 |
| Spherical cavity | |
| Depth | 1.7 ± 0.2 km |
| Radius | 240 ± 20 m |
| Density contrast | −2300 kg/m3 |
| Rectangular dike | |
| Strike direction | N60°W |
| Open dislocation | 1.6 ± 1.0 m |
| Horizontal length | 13.5 ± 1.0 km |
| Vertical width | 10 km |
| Density of the intruding matter | 2600 kg/m3 |
The pit crater continued to grow until the end of September 2000 to form a caldera of 1.6 km in diameter, indicating that a huge volume of 6 × 108 m3, equivalent to a mass of 1 × 109 t, must have been transported from Miyake-jima to somewhere else. In the following, we show that the absolute gravity data for Miyake-jima constrain mass movement during the caldera formation. We further decompose the gravity changes on Miyake-jima Island into three parts: (1) attraction associated with the lost mass around the caldera; (2) the Bouguer effect of the local uplift/subsidence on gravity; and (3) the residual (Fig. 14a). The first two components can be accurately estimated by using the topography change data67) and the GPS data68) during the period. We note that the residual gravity on Miyake-jima Island remained as small as ±2 µGal during the entire period. The destination of the transported mass is constrained by the condition that the downward attraction due to the migrated mass must be equal to the residual gravity within observational error. Figure 14b shows the Newton attraction expected at the gravity station of Miyake-jima as a function of the horizontal distance and depth of the destination. The areas marked in red in Fig. 14b, just below Miyake-jima volcano, are the most implausible destinations. Thus, we can reject the hypothesis that the magma drained back to deeper parts beneath the volcano during the collapse of the summit. The preferred destination is found in the area located 15–40 km from Miyake-jima, suggesting the lateral transport of the magma.

Search for the destination of the mass transported from Miyake-jima. (a) The gravity changes observed at the absolute gravity station on Miyake-jima volcano (blue) comprise the topographic change effect (green), the Bouguer effect of site elevation change (orange), and the remainder (red). (b) Newton attraction expected at the gravity station of Miyake-jima when a mass of 109 t is transported to a spherical region centered at a specified depth and distance from Miyake-jima. The units of attraction are µGal.
The results are intriguing because an intensive earthquake swarm of more than 20000 microearthquakes occurred 15–35 km away from Miyake-jima volcano during the caldera formation period (Fig. 15c).63) It is likely that the transport of fluid magma triggered the microearthquakes partly because the effective confining pressure must be reduced by the intruding fluid. In addition, the significant displacements around the swarm area69) indicate a tensile opening of 6 m on a vertical plane that is 20 km in length and extends from 2 to 20 km in depth (Figs. 15d and 15e).69) The 2 × 109-m3 space created by the tensile opening is comparable in volume to the 0.6 × 109-m3 mass lost from Miyake-jima. Data pertaining to the gravity, hypocenters, and crustal displacement convinced us of the lateral magma flow from Miyake-jima and the resulting collapse of the volcanic edifice, i.e., caldera growth (Fig. 15b).
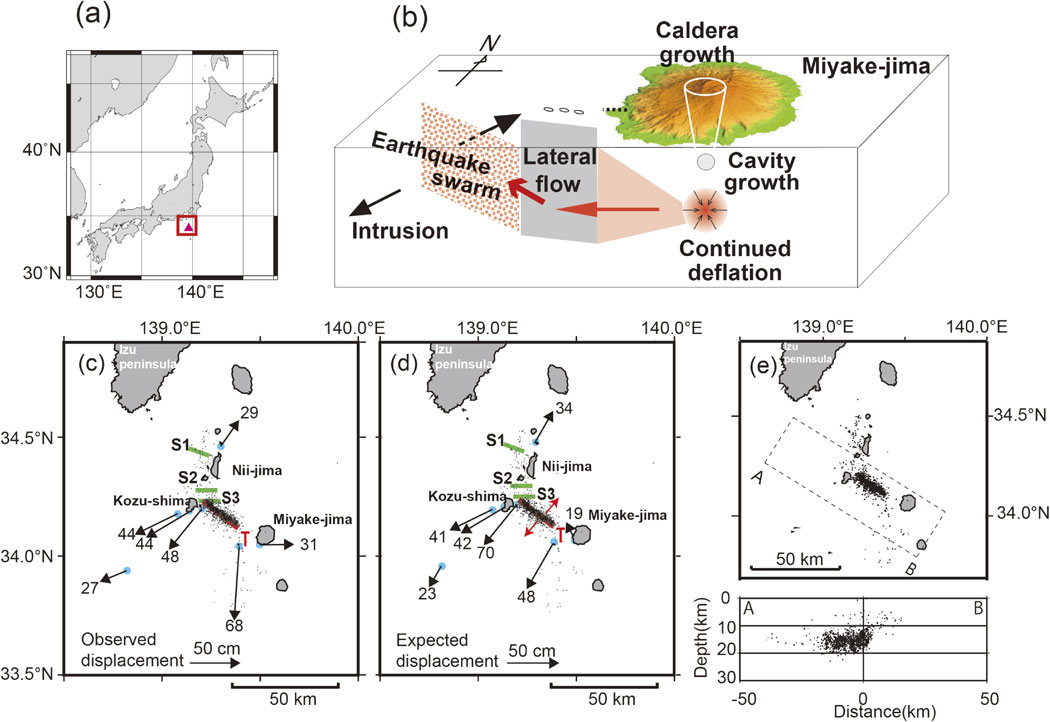
Magma movement from Miyake-jima volcano from July to September 2000.70) (a) The study area is indicated by the red square. The red triangle indicates Miyake-jima volcano. (b) A conceptual model that provides a comprehensive explanation of the growth of the Miyake-jima caldera, earthquake swarm, and crustal deformation. (c) Displacements as large as 20–60 cm are observed around the swarm area. The numerous small dots are epicenters of ∼20000 small earthquakes. S1, S2, and S3 denote the strike-slip faults responsible for M6 class earthquakes during the period. (d) Horizontal displacement expected for a tensile opening of 6 m on a vertical plane (20 km × 17 km) denoted by a red line “T” and three other supplementary strike-slips: 0.5 m on S1, 0.5 m on S2, and 1.5 m on S3. (e) Hypocenter distribution of the earthquakes with magnitudes greater than 3.5 from July 1 to September 30, 2000 after the unified seismic catalog of the Japan Metrological Agency. The hypocenters lie on a vertical plane at depths of 2–20 km.
Herein, we have provided an overview of the advances in gravity research on volcanic eruptions and earthquakes. Static investigations based on the gravity anomalies are still useful for detecting the possible faults of future earthquakes in Japan and other earthquake-prone areas. A more modern technique that integrates gravimetry and muon radiography is expected to flourish in the revelation of the volcanic interiors. With respect to the dynamic aspect, the author’s research group devised a theoretical framework for the gravity changes due to dislocations. The importance of this framework will increase further with respect to earthquake science because the hybrid gravity measurements and dedicated satellite gravity missions provide gravity data as accurate as 1 µGal more efficiently than that obtained previously. Integrated analysis using the two observational tools is considerably useful when studying the co- and postseismic processes within the Earth on a regional to global scale because they are complementary. The former has no limitations in terms of spatial resolution but is only applicable to the gravity changes on land, whereas the latter yields data over the sea even though its spatial resolution is limited to a few hundred kilometers.
It should be noted here that gravity analysis is limited by the disturbances caused by groundwater. Unusual gravity changes are often observed after heavy rainfall of >50 mm/day.71) Consequently, the gravity method of studying earthquakes and volcanic activity does not work without appropriately correcting the gravity disturbances caused by groundwater. Kazama and Okubo (2009)72) provided a solution to this problem based on physical hydrology. The effectiveness of the hydrological correction method was proved in subsequent studies conducted by the author’s research group.73)–75)
Because no physical observables other than gravity are sensitive to mass redistribution within the deep interior of the Earth, gravity analyses will continue to provide invaluable information about the transport of magma beneath volcanoes and the possible effects of fluids on the earthquake processes.75)–77)
The author expresses his sincere thanks to the anonymous reviewers for their help in improving this manuscript. He is also deeply thankful to Prof. M. Amalvict for her explanation about Richer’s manuscript. Figure 15(e) was drawn using the Wellweb system of the Geological Survey Institute of Japan (https://gbank.gsj.jp/wellweb/cgi-bin/GSJ/earth/epicenter/res?0). This work was supported by the JSPS KAKENHI Grant Number 18H01305.
Edited by Yoshio FUKAO, M.J.A.
Correspondence should be addressed: S. Okubo, Earthquake Research Institute, The University of Tokyo, 7-3-1 Hongo, Bunkyo-ku, Tokyo 113-0033, Japan; Faculty of Geosciences and Environmental Engineering, Southwest Jiaotong University, West Park, Hitech Zone, Chengdu, Shichuan 611756, China (e-mail: okubo@eri.u-tokyo.ac.jp, okubo@swjtu.edu.cn).

Shuhei Okubo was born in the Oita Prefecture in 1954. He graduated from the University of Tokyo in 1976. He majored in Geophysics at the Graduate School of Science of the University of Tokyo and received his Ph.D. degree in 1982. During his graduate student days, he presented a simple and elegant theory on the Earth’s rotation in 1980 along with T. Sasao and M. Saito. It is now well known as the SOS theory after the authors’ family names. He began his professional career at the Earthquake Research Institute (ERI) of the University of Tokyo in 1982 by studying the Earth’s time-variable gravity field and became a Professor in 1997. He has presented comprehensive formulas with respect to gravity changes during earthquakes and volcanic eruptions. He has been awarded the Guy Bomford Prize (from the International Association of Geodesy) and the Inoue Prize for Science for his accomplishments in 1991 and 1997, respectively. He transitioned from theoretical formulation to field works using the technique of hybrid gravimetry. He elucidated the transport of magma during the 2000 Miyake-jima eruption, the 2004 Asama eruption, and the Sakurajima eruption from 2009. He served ERI as the Director from 2005 to 2009 and was appointed as a Member of the Science Council of Japan from 2011 to 2017. He is currently a Professor Emeritus of the University of Tokyo and a Professor of the Southwest Jiaotong University, Chengdu, China.