要旨
【目的】本研究では,歩行支援ロボットHybrid Assistive Limb(以下,HAL)とウェルウォークWW-2000(以下,WW)を用いた回復期脳卒中後患者の介入開始時の身体機能と練習効果を後方視的に比較した。【方法】各ロボットで2週間以上歩行練習を実施した患者をHAL群とWW群に群分けし,歩行自立度,下肢運動機能,バランス能力,日常生活自立度,認知機能を評価した。【結果】介入開始時,年齢や歩行自立度,認知機能は差がなく,他の項目はHAL群で有意に高値だった。介入前後の変化量は両群で有意な改善を示し,特に歩行自立度とバランス能力はHAL群がWW群より改善度が高かった。【結論】下肢運動機能やバランス能力,日常生活動作能力が比較的高い患者にはHAL, 低い患者にはWWが選択されていた。さらに,HALは歩行自立度およびバランス能力の改善に有利で,WWは重度障害例でも効果が期待できることが示唆された。
Abstract
Objective: This study retrospectively examined patients in the convalescent phase after stroke who received walking assistance using either the Hybrid Assistive Limb (HAL) or WW-2000 (WW) device.
Methods: Patients who underwent walking training with each robot for more than two weeks were divided into respective groups, and their walking independence, lower limb motor function, balance ability, activities of daily living independence, and cognitive function were evaluated.
Results: At the start of the intervention, there were no differences in walking independence or cognitive function; however, the other parameters showed significantly higher values in the HAL group. In terms of changes before and after the intervention, both groups showed significant improvement in each item, with the HAL group showing significantly greater improvement than the WW group in walking independence and balance ability.
Conclusion: Among post-stroke patients in the convalescent phase, HAL was selected for those with relatively high lower limb motor function, balance ability, and activities of daily living ability, whereas WW was selected for those with lower levels. Furthermore, HAL was advantageous for improving walking independence and balance ability, whereas the use of WW suggested that functional improvement through robot-assisted therapy is also expected in patients with severe disabilities.
はじめに
脳卒中発症患者のうち65歳以上の高齢者が約2/3を占め1),この年齢層では身体機能や併存疾患の影響から自立歩行の再獲得がより困難となることが多い。こうした背景のもと,従来の理学療法に加えて電気刺激療法や装具療法など多様なリハビリテーション手法が開発されてきており,近年ではロボットを活用した歩行練習が注目されている。ロボット支援歩行練習(Robot-assisted Gait Training:以下,RAGT)は,ロボットの動力により歩行中の下肢運動を外的に補助し,反復的かつ集中的な歩行練習を可能とするリハビリテーション手法である。脳卒中後の歩行再建における有効性については,従来の理学療法(関節可動域練習,筋力増強練習,バランス練習,歩行練習など)と比較して,RAGTを併用することで歩行自立度や歩行速度の改善が促進されることが複数の系統的レビューで示されている2)。また,脳卒中治療ガイドライン2021[改訂2023]でも,「歩行ができない発症後3カ月以内の脳卒中患者に対して,歩行補助ロボットを用いた歩行訓練を行うことは妥当である(推奨度:B,エビデンスレベル:高)」とされている3)。
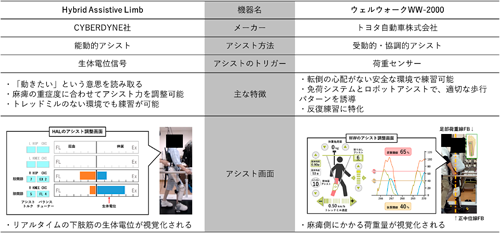
現在,国内外で使用されている歩行支援ロボットは外骨格型を中心に複数存在するが,機器ごとに構造や制御原理が異なる。マッターホルンリハビリテーション病院(以下,当院)は,2012年3月より装着型ロボットスーツHybrid Assistive Limb(以下,HAL:CYBERDYNE社)と2022年3月よりウェルウォークWW-2000(以下,WW:トヨタ自動車株式会社)を導入している。これらは,脳卒中後患者の歩行リハビリテーションにおいて,本邦で主に選択されている外骨格型の歩行支援ロボットである。HALは装着者の下肢の生体電位を検出し,本人の意思に応じたアシストを行うことが特徴であり,随意運動の促通や神経可塑性の促進が期待されている4)。一方,WWは,膝関節駆動型で装具型の外骨格を用い,患側下肢の振り出しや膝制御を外部動力で補助し,体幹の安定性や安全性の高い環境で段階的な負荷調整を可能とすることが利点とされている5)。当院では安全性,実行可能性,患者適合の観点から運用上の選択基準(例:下肢の随意性が残存されていればHAL,麻痺側下肢や体幹の支持が必要とされればWWなど)で機器を使い分けてきた。しかし,これらの機器の選択基準や適応に関するエビデンスは限られており,両者を直接比較した報告は渉猟するかぎり見当たらない。また,各機器の利点・課題についても,先行研究では対象患者の重症度や練習内容が異なるため,一貫した見解が得られていない2)。
これらのことから,RAGTは有効である可能性は示されているものの,「どのような患者に」「どの機器が最も効果的か」という臨床上重要な問いについては十分なエビデンスが整っていないといえる。特にHALとWWのように原理の異なる外骨格型歩行支援ロボット間の,回復期脳卒中後患者の機能レベル(麻痺の重症度やバランス能力)に応じた効果の違いや,臨床現場での運用状況に関する知見は乏しいのが現状である。そこで,本研究の目的は,回復期脳卒中後患者における2種類の外骨格型歩行支援ロボット(HALおよびWW)の選択状況の実態を後方視的に検討し,それぞれの練習効果を麻痺の重症度やバランス能力といった機能レベルに応じた差異によって明らかにすることとした。それによって,歩行支援ロボットの特徴を最大限に活かした歩行リハビリテーションへの新たな知見を提供することが期待される。
対象および方法
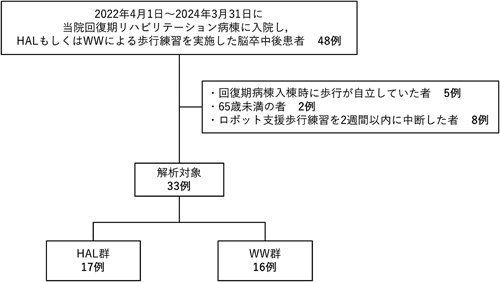
1. 対象対象は,2022年4月1日~2024年3月31日までに当院回復期リハビリテーション病棟に入院し,HALもしくはWWによるRAGTを実施した脳卒中後患者とした。包含基準は,1)片側の脳梗塞や脳出血が原因で片麻痺を呈している65歳以上の者,2)意識障害や治療中の心不全あるいは下肢・体幹の骨折などの歩行練習が制限される合併症がなく,医師によりRAGTが許可されている者とした。除外基準は1)回復期リハビリテーション病棟入院時に歩行が自立している者,2)RAGTを開始して2週間以内に全身状態の変化などを理由に中断した者とした。本研究は後方視的研究であるため,事前にサンプルサイズの計算は行わず,研究期間中に得られたデータを用いて解析を行った。
本研究では,事前にマッターホルンリハビリテーション病院倫理委員会の承認を取得し(承認番号:MRH22004),対象者の個人情報が特定されないよう匿名化した。
2. 検査項目RAGT開始時の基本属性として年齢,性別,Body Mass Index(以下,BMI),診断名,麻痺側,発症からRAGT介入開始までの期間(日),介入期間(日),介入回数(回),介入頻度(回/日;介入回数を介入期間で除した値)を調査した。歩行自立度は0から5の6段階の順序尺度であるFunctional Ambulation Categories(以下,FAC)を用いて評価した6)。段階0は歩行困難,または平行棒内のみ歩行可能だが,平行棒外を安全に歩くために2人以上の介助が必要,段階1は平地歩行において常に1人の介助が必要,段階2は平地歩行において常にあるいは時々,軽く触れる程度の介助が必要,段階3は介助なしに平地歩行が可能だが,安全のために1人の近位監視が必要,段階4は平地歩行が自立しているが,階段や斜面,不整地では口頭指示や介助が必要,段階5は平地や不整地,階段,斜面を問わず,自立して歩行が可能な状態を示す。加えて,脳卒中後機能障害はStroke Impairment Assessment Set(以下,SIAS),下肢運動機能はFugl-Meyer Assessment下肢運動項目(以下,FMA),バランス能力はBerg Balance Scale(以下,BBS),日常生活動作(Activities of Daily Living:以下,ADL)能力はFunctional Independence Measure(以下,FIM),認知機能は長谷川式簡易認知機能検査(Hasegawa Dementia Scale-revised:以下,HDS-R)を用いて検査した。なお,本研究では,HDS-R 20点未満の症例や,高次脳機能障害を有する症例も除外基準とはしなかった。これは,実際の臨床現場では,これらの症状を呈する患者にもロボット介入が試みられることがあり,その効果を後方視的に検討する意義があると考えたためである。評価時には,担当理学療法士(Physical Therapist:以下,PT)が口頭指示による練習の遂行が可能であることを確認し,評価時においても必要に応じて繰り返し説明を行うことで,指示理解の確認に努めた。
3. 2種類の外骨格型ロボットによる歩行練習HALおよびWWの選択は,臨床上の選択基準に基づいて担当医師もしくはPTにより決定された。その主な選定基準は以下のとおりである。選定は臨床上の判断で行われ,機器の割当てが不均一となる可能性があるため,ベースラインの特性を記録した。
-
・HAL:股関節もしくは膝関節に随意運動が僅かにでも出現しており,体幹機能が比較的保たれている症例。
-
・WW:体幹機能に乏しく立位保持が不安定なため,歩行時の介助量が比較的多く必要とされる症例。
HALおよびWWを装着した歩行練習を1回30分間とし,頻度は週3~4回を目標として実施した。これは,RAGTにおける集中的な反復練習の重要性が先行研究で示されていること7),および当院の臨床プロトコルに基づいている。歩行練習中には,血圧および心拍数の変化や対象の自覚的な疲労の訴えを考慮して,一時的な休息を設けた。歩行練習中はすべての症例で,共通して免荷式トレッドミルを使用しており,必要に応じて体重の免荷を許容した。免荷量の基準は,先行研究に則って最大30%とした8)。なお,介入期間中はRAGTの時間と頻度のみを規定し,その他の理学療法,作業療法,言語聴覚療法は各担当セラピストが各症例に応じて実施した。それぞれ症例によって異なるが,実施時間は1日に180分を基本とした。
1)Hybrid Assistive Limb(HAL)HAL医療用下肢タイプは2015年に本邦で医療機器として承認された歩行支援ロボットである(図1-左)。本研究では,単脚用のHAL(Mサイズ)を使用し,サイバニック随意制御(Cybernic Voluntary Control:以下,CVC)モードを選択した。CVCモードは単回使用HAL専用電極を麻痺側の股関節屈筋群(大腿直筋)と伸筋群(大殿筋),膝関節屈筋群(半腱様筋)と伸筋群(外側広筋)に貼付し,読み取られた生体電位をトリガーに麻痺側下肢の関節運動をアシストする方法である。
HALを使用した歩行練習は2名のPTで実施し,1名はリスク管理のために患者を後方より監視または介助し,もう1名はタブレットのモニター画面に表示される生体電位信号や歩容などの情報を基にリアルタイムにHALのアシストトルクやバランスチューナーの調整を行った。
2)ウェルウォークWW-2000(WW)WWは,トヨタ自動車株式会社と藤田医科大学が共同開発した,脳卒中片麻痺患者の歩行練習を目的とした長下肢装具型のロボットである(図1-右)。主な構成要素は,安全懸架装置,脚免荷ハーネス,正面モニター,操作パネル,低床トレッドミル(0.20~3.00 km/h),膝関節モーター,足関節可動範囲可変機構,足圧センサーである。アシスト方法は,膝関節モーターによる麻痺側立脚期の膝関節伸展を10段階で補助する「膝伸展アシスト」,脚免荷ハーネスによる麻痺側遊脚期の振り出しを6段階で補助する「振り出しアシスト」である。さらに,WWには歩行中の映像を正面モニターに表示する「視覚フィードバック機能」や,荷重量や膝屈曲角度を音で知らせる「聴覚フィードバック機能」を備えている。
WWを使用した歩行練習もHALと同様に,2名のPTで実施し,1名はリスク管理のために患者を後方より監視または介助し,もう1名はモニターに表示される荷重量や歩容からアシスト量や膝関節角度の調整を行った。
4. 統計学的解析基準を満たした対象を,HALを使用して歩行練習を行った者(以下,HAL群)と,WWを使用して歩行練習を行った者(以下,WW群)に群分けした。各検査項目のスコアについては,Shapiro-Wilk検定により正規性を確認した。
その後,年齢,BMI, SIAS, FMA, BBS, FIM, HDS-Rの群間比較には独立2標本t検定を使用し,性別,診断名,麻痺側の比較にはχ2検定を行った。また,正規分布に従わないデータ,または連続変数ではない発症から介入開始までの期間,介入期間,介入回数,介入頻度,FACについてはMann-WhitneyのU検定を用いて群間比較を行った。さらに,HAL群およびWW群の介入前後におけるFAC, SIAS, FMA, BBS, FIMの前後比較に対応のあるt検定,変化量(介入後スコア−介入前スコア)の比較に独立2標本t検定を実施した。
多重検定による第I種の過誤を制御するため,介入前の群間比較についてはBonferroni補正を適用し,介入効果の群間比較についてはHolm-Bonferroni法を用いて補正を行った。統計解析には,統計ソフトウェアR(ver. 4.4.1)を使用し,有意水準は5%とした。
結果
研究期間中,両ロボットのいずれかの介入を受けた患者は合計48例であった。このうち,除外基準に該当する15例を除外した。最終的にHAL群17例,WW群16例を解析対象とした。対象者の選定プロセスを図2に示す。
1. 介入開始時の基本属性と機能評価の比較次に,表1に群間比較の結果を示す。年齢,性別,BMI,診断名,麻痺側,発症からRAGT介入開始までの期間,介入期間,介入回数,介入開始時のFAC, HDS-Rは群間で有意な差を認めなかった。
表1 対象の基本属性と身体機能の群間比較
| HAL群(n=17) | WW群(n=16) | p値 |
|---|
| 基本属性 |
| 年齢(歳)a | 77.5±11.8 | 77.8±13.3 | 0.94 |
| 性別(男/女)b | 8/9 | 10/6 | 0.40 |
| BMI (kg/m2) a | 20.4±2.6 | 19.0±2.7 | 0.15 |
| 診断名(梗塞/出血)b | 15/2 | 14/2 | 0.95 |
| 麻痺側(右/左)b | 8/9 | 8/8 | 0.87 |
| 発症から介入開始までの期間(日)c | 51.1±34.6 | 48.1±25.6 | 0.79 |
| 介入期間(日)c | 45.1±18.9 | 61.1±27.8 | 0.07 |
| 介入回数(回)c | 18.2±7.7 | 17.6±11.1 | 0.86 |
| 介入頻度(回/日)c | 0.41±0.09 | 0.32±0.10 | <0.01 |
| FAC c | 0−2 [1] | 0−1 [0] | 0.13 |
| 介入開始前の機能評価 |
| SIAS(点)a | 45.5±11.3 | 34.3±9.4 | <0.01 |
| FMA(点)a | 17.0±7.0 | 10.0±5.5 | <0.01 |
| BBS(点)a | 16.2±12.7 | 6.2±7.4 | <0.01 |
| FIM(点)a | 51.4±16.9 | 37.1±11.7 | <0.05 |
| HDS-R(点)a | 20.2±8.1 | 14.9±9.7 | 0.12 |
対象者の基本属性,機能評価を平均値±標準偏差または最小値−最大値[中央値]で示す.BMI: Body Mass Index, FAC: Functional Ambulation Categories, SIAS: Stroke Impairment Assessment Set, FMA: Fugl-Meyer Assessment, BBS: Berg Balance Scale, FIM: Functional Independence Measure, HDS-R: Hasegawa Dementia Scale-Revised.
a:独立2標本t検定,b:χ2検定,c:Mann-WhitenyのU検定.
介入開始時のSIAS, FMA, BBS(それぞれp<0.01)およびFIM(p<0.05)については,HAL群がWW群に比べて有意に高かった。
2. 介入前後の練習効果の比較HAL群およびWW群における練習効果について,両群におけるFAC, SIAS, FMA, BBS, FIMの介入前後のスコアと変化量の比較を表2に示す。両群ともに全項目において,ロボット支援歩行練習前後で有意にスコアの向上を示した(p<0.05)。さらに,FACとBBSの変化量において,HAL群がWW群と比較して有意に高値を示した(p<0.01)。両群における歩行自立度FACの介入前後での分布を図3に示す。介入終了時に歩行が自立した対象(FAC ≧3)は,HAL群で17例中9例(52.9%),WW群は16例中5例(31.3%)であった。一方,SIAS, FMA, FIMの変化量については有意な差は認めなかった。
表2 両群における各検査項目の介入前後のスコアと変化量の比較
| | HAL群(n=17) | p値a | WW群(n=16) | p値a | p値b |
|---|
| FAC | 前 | 0−2 [1] | <0.05 | 0−1 [0] | <0.05 | |
| 後 | 0−5 [3] | 0−4 [0.5] | |
| 変化量 | 2.0±0.8 | | 1.1±1.3 | | <0.01 |
| SIAS(点) | 前 | 45.5±11.3 | <0.05 | 34.3±9.4 | <0.05 | |
| 後 | 53.5±15.0 | 39.2±11.7 | |
| 変化量 | 8.0±7.1 | | 8.3±9.9 | | 0.94 |
| FMA(点) | 前 | 17.0±7.0 | <0.05 | 10.0±5.5 | <0.05 | |
| 後 | 21.2±7.2 | 14.1±7.1 | |
| 変化量 | 4.2±3.0 | | 4.1±3.2 | | 0.96 |
| BBS(点) | 前 | 16.2±12.7 | <0.05 | 6.2±7.4 | <0.05 | |
| 後 | 24.4±15.5 | 9.6±8.8 | |
| 変化量 | 8.2±6.8 | | 2.9±3.5 | | p<0.01 |
| FIM(点) | 前 | 51.4±16.9 | <0.05 | 37.1±11.7 | <0.05 | |
| 後 | 75.0±23.1 | 52.7±24.4 | |
| 変化量 | 23.6±13.1 | | 15.6±15.6 | | 0.13 |
介入前後の各検査項目の数値および変化量を最小値−最大値[中央値]または平均値±標準偏差で示す.FAC: Functional Ambulation Categories, SIAS: Stroke Impairment Assessment Set, FMA: Fugl-Meyer Assessment, BBS: Berg Balance Scale, FIM: Functional Independence Measure.
a:対応のあるt検定,b:独立2標本t検定.
考察
本研究では,回復期脳卒中後患者に対するHALとWWの2種類の外骨格型歩行支援ロボットを使用したRAGTにおける各機器の選択状況や練習効果について検証を行った。
1. どのような対象にHALおよびWWが選択されたか本研究では,年齢や介入開始時の歩行自立度,認知機能などに差がない中で,運動機能やバランス能力,ADL能力が比較的高い患者にはHAL,それらの身体機能が重度に障害された患者にWWが選択されていた(表1)。HALとWWの意思決定を,それぞれのロボットの特徴から考察する。
HALは麻痺側下肢筋群の生体電位をもとに,患者の運動企図を読み取り,不足する運動出力に対応する関節トルクをアクチュエーターにより補う。そのため,先行研究では,重度の運動麻痺を呈する患者は,HALによる練習効果を妨げる可能性が指摘されている9)。上野らは,CVCモードによる支援は,運動イメージと出力の乖離を狭めることができ,内在的フィードバックが促され,機能改善が促進されることが想定されると報告している10)。しかしながら,他の先行研究によると下肢の運動麻痺が重度である場合,筋電図に基づく制御は脳卒中後患者の正常な運動パターンの回復を促進するのではなく,代償運動や異常パターンなどを助長してしまう可能性が示されている11)。
一方,WWは体重支持や膝伸展補助を備え,荷重応答が不十分な中等度から重度例や発症早期例でも安全に反復歩行練習が可能で,歩行能力の改善や異常歩行パターン是正に寄与することが示されている5)。才藤らは,重度片麻痺患者において装具やロボットを使用した早期からの歩行練習を推奨しており,その中でWWは細かな難易度調整や多様なフィードバック機構など,運動学習理論の観点から多くの利点があると報告している12)。
本研究では,実臨床においてHAL群とWW群で対象患者の重症度や身体機能に差がみられ,その傾向は先行研究の適応報告とおおむね整合していた5)9)。また両群ともに歩行自立度の改善が認められたことから,それぞれの機器が患者特性に応じて有効に機能している可能性が示唆される。本研究は機器選択の標準アルゴリズムを提示するものではないが,現場で実際に行われている選択傾向と転帰を明らかにすることで,臨床における意思決定の参考となる知見を提供する点に意義があると考える。
2. HALおよびWWの練習効果の違い本研究では,HALおよびWWを使用した両群で歩行自立度,脳卒中後機能障害,下肢運動機能,バランス能力,ADL能力に介入前後で有意な改善を認め,さらに歩行自立度とバランス能力に関してはHAL群でより高い改善を示した(表2)。
亜急性脳卒中後患者の歩行自立度や下肢運動機能,バランス能力に対するRAGTは,従来の歩行練習と比較しても高い効果をもたらす可能性があり,さらに4週間以上継続される介入が最良と示されている13)14)。本研究の介入期間は,HAL群で平均45.1日,WW群で平均61.1日と両群で4週間以上継続されており,脳卒中後患者のRAGTにおいて十分な練習期間が確保されたプロトコルであったことが確認された。外骨格型歩行支援ロボットは,ロボットの強固な支持性や免荷によって,患者の転倒に対する恐怖感を抑えることができ,歩行練習中に重心をより麻痺側に移すことを促す効果がある15)。加えて,ロボットの関節アシストによって,機能が低下した患者でも高強度で反復的な歩行練習を行うことができ,前庭器や固有受容器への感覚刺激の入力が増加していくことで,神経可塑性や身体機能回復を促進させることが期待されている16)。また,両群でFIMの点数にも向上がみられたことについて,RAGTでは,集中的に練習することで獲得した身体機能を実際のADLにつなげる練習に費やすことができたと考えられる。これらのことから,RAGTにおいて選択されるデバイスに違いがあっても,ロボットアシストによって十分な練習量と練習期間を提供することは,脳卒中後患者の身体機能の回復およびADL能力の向上につながることが示唆された。
続いて,HAL群の方が歩行自立度およびバランス能力ともにより改善度が高かったことについて考察する。入院リハビリテーション中のバランス能力の回復率は,重度亜急性期脳卒中患者における退院時の歩行自立度と強い関連があったと報告されている17)。本研究の結果から,RAGTにおけるデバイスの違いは,歩行自立度やバランス能力に影響する可能性が考えられた。Puentesらは,歩行時の下肢運動を共変動ループと共変動平面の観点から評価しており,脳卒中後患者に対するHAL介入後にこれらの逸脱が減少し,下肢協調性が改善したことを報告している18)。つまり,HALは下肢筋活動や関節運動の不規則性を修正することに寄与し,歩行時の正しい神経筋制御を再学習させていることがうかがえる。
一方,多くのレビューではRAGTの介入頻度の違いも,練習効果に影響する可能性が示されている。Mehrholzらのレビューでは,週2~3回のものから週7回のものまで介入頻度に幅がみられたと報告している2)。本研究のRAGTの頻度は,HAL群は平均0.41回/日(週に約2.87回),WW群は平均0.32回/日(週に約2.24回)であった。週3~4回を目標として実施したものの,各患者の状態や目標によって両群で介入頻度の差が認められた。したがって,本研究においても,介入頻度の違いが,歩行自立度およびバランス能力の回復の差に影響した要因のひとつであることが考えられた。特にHALは随意的な筋活動や課題遂行能力がある程度保たれている患者が対象となるため,体力的負担が少なくスケジュール調整もしやすい傾向があり,結果として予定回数を実施しやすかったと考えられる。一方,WW群は体重支持や膝伸展補助が必要な重度例が多く,疲労や合併症管理の影響で予定回数に達しない患者が存在した。このような背景から,介入頻度の違いが生じた可能性がある。さらに,本研究の対象患者は発症から介入開始までの期間が平均約50日であり,脳卒中後の回復期に相当する。この時期は,自発的な神経学的回復が期待できる期間でもあり,本研究で認められた機能改善の一部は,ロボット介入だけでなく,介入頻度の違いや自然回復の影響を受けている可能性も考慮する必要がある。
3. 本研究の限界と展望当院では,回復期脳卒中後患者に対して可能な限りすべての症例でRAGTを試みており,対照群を設定していない。そのため,従来のリハビリテーションのみを実施してどのような患者がHALもしくはWWを使用するべきかという見解について述べることはできない。さらに,HDS-R 20点未満の認知機能低下を伴う症例が含まれており,評価項目によっては指示理解の問題が生じた可能性がある。しかし,実際の臨床介入においては,PTによる丁寧な説明と誘導によって,練習は遂行可能であったことを確認している。今後の研究では,認知機能レベルをより厳密に評価し,その影響を考慮した解析を行う必要がある。加えて,本研究の対象群であるHAL群とWW群のRAGT開始時点において,機能評価項目に有意な群間差が認められたことも限界点として挙げられる。今後は,このようなベースラインの交絡因子を統計的に調整するため,共分散分析などの手法を用いてより詳細な分析を行い,介入効果に関する考察を深めていく必要がある。
結論
回復期脳卒中後患者を対象にHALとWWを使用した歩行練習を実施し,それぞれのロボットの意思決定と練習効果について考察した。下肢運動機能やバランス能力,ADL能力が比較的高い患者はHAL,それらの身体機能がより重度の患者にはWWが選択されていた。さらに,HALはバランス能力や歩行自立度の改善に有利であり,WWは重度の機能低下が認められてもロボットアシストにより歩行練習が可能になり,介入後の機能改善が期待できることが示唆された。
文献
- 1) Feigin VL, Forouzanfar MH, et al.: Global Burden of Diseases, Injuries, and Risk Factors Study 2010 (GBD 2010) and the GBD Stroke Experts Group: Global and regional burden of stroke during 1990-2010: Findings from the Global Burden of Disease Study 2010. Lancet. 2014; 383: 245–254.
- 2) Mehrholz J, Thomas S, et al.: Electromechanical-assisted training for walking after stroke. Cochrane Database Syst Rev. 2020; 10: CD006185.
- 3) 日本脳卒中学会脳卒中治療ガイドライン委員会編:脳卒中治療ガイドライン2021[改訂2023].協和企画,東京,2023, pp. 145–147.
- 4) Ueda T, Hamada O, et al.: Feasibility and safety of acute phase rehabilitation after stroke using the hybrid assistive limb robot suit. Neurol Med Chir (Tokyo). 2013; 53: 287–290.
- 5) Ii T, Hirano S, et al.: Robot-assisted gait training using Welwalk in hemiparetic stroke patients: An effectiveness study with matched control. J Stroke Cerebrovasc Dis. 2020; 29: 1–7.
- 6) Holden M, Gill K, et al.: Clinical gait assessment in the neurologically impaired reliability and meaningfulness. Phys Ther. 1984; 64: 35–40.
- 7) Bae YH, Ko YJ, et al.: Effects of robot-assisted gait training combined with functional electrical stimulation on recovery of locomotor mobility in chronic stroke patients: A randomized controlled trial. J Phys Ther Sci. 2014; 26: 1949–1953.
- 8) Choi W: Effects of robot-assisted gait training with body weight support on gait and balance in stroke patients. Int J Environ Res Public Health. 2022; 19: 5814.
- 9) Yokota C, Tanaka K, et al.: Effect of cyborg-type robot hybrid assistive limb on patients with severe walking disability in acute stroke: A randomized controlled study. J Stroke Cerebrovasc Dis. 2023; 32: 107020.
- 10) 上野友之,清水如代,他:歩行障害のリハビリテーション治療—ロボットを用いた歩行機能回復治療プログラム—. Jpn J Rehabil Med. 2018; 55: 745–750.
- 11) Li M, Xu G, et al.: A review: Motor rehabilitation after stroke with control based on human intent. Proc Inst Mech Eng H. 2018; 232: 344–360.
- 12) 才藤栄一,平野 哲,他:運動学習と歩行練習ロボット—片麻痺の歩行再建—. Jpn J Rehabil Med. 2016; 53. 27–34.
- 13) Calabro RS, Sorrentio G, et al.: Robotic-assisted gait rehabilitation following stroke: A systematic review of current guidelines and practical clinical recommendations. Eur J Phys Rehabil Med. 2021; 57: 460–471.
- 14) Hu MM, Wang S, et al.: Efficacy of robot-assisted gait training on lower extremity function in subacute stroke patients: A systematic review and meta-analysis. J Neuroeng Rehabil. 2024; 21: 165.
- 15) Yun N, Joo MC, et al.: Robot-assisted gait training effectively improved lateropulsion in subacute stroke patients: A single-blinded randomized controlled trial. Eur J Phys Rehabil Med. 2018; 54: 827–836.
- 16) Morone G, Paolucci S, et al.: Robot-assisted gait training for stroke patients: Current state of the art and perspectives of robotics. Neuropsychiatr Dis Treat. 2017; 13: 1303–1311.
- 17) Cf G, Mg G, et al.: Association between balance recovery during inpatient rehabilitation and gait without physical assistance in severe subacute post-stroke patients. Physiother Res Int. 2023; 28: e2029.
- 18) Puentes S, Kadone H, et al.: Reshaping of bilateral gait coordination in hemiparetic stroke patients after early robotic intervention. Front Neurosci. 2018; 12: 719.