
- 4 号 p. 23-00028-
- 3 号 p. 22-00474-
- 2 号 p. 22-00173-
- 1 号 p. 22-00269-
- |<
- <
- 1
- >
- >|
-
Yu GU, Fanduo MENG, Ning ZHANG, Xiufeng ZHANG, Tao LIU2023 年18 巻1 号 p. 22-00289
発行日: 2023年
公開日: 2023/01/16
[早期公開] 公開日: 2022/11/03 ジャーナル オープンアクセス
ジャーナル オープンアクセスAccurate biomechanical measurement systems are critical tools in advanced prosthetic socket designs. However, an efficient active measurement system of soft tissues, particularly for amputees in vivo, has proved lacking and challenging since rapidly changeable force and deformation of soft tissues under slope retention tests have to be captured within minimum milliseconds. In this paper, we propose a multichannel indentation system with 8 active indentation units, 8 force sensors, and a high-speed control system. The forearm diameter is measured ranging from 10mm to 140mm, which satisfies the need for forearm amputees. The FSM (finite-state machine) based control system is also designed for enhancing safety and improving the real-time properties of data acquisition. The measurement accuracies and performance are verified respectively by an accuracy experiment using a high-precision load cell and a practical test experiment recruiting a forearm amputee. As a whole, the average linearity L, hysteresis H, and repeatability R of all the 8 channel indentation units are 0.34 (%F・S), 0.69(%F・S), and 0.99 (%F・S), respectively. The detected data from the practical experiment within 75s shows viscoelastic properties of the soft tissues. Results demonstrate that the proposed measurement system can be used for efficient biomechanical data acquisition of forearm soft tissue in vivo and has the potential clinical utility for forearm amputees.
Graphical Abstract Fullsize Image抄録全体を表示PDF形式でダウンロード (1765K) -
 Wataru HIJIKATA, Mutsuki HAGIWARA, Takumi MOCHIDA, Wataru SUGIMOTO2023 年18 巻1 号 p. 22-00269
Wataru HIJIKATA, Mutsuki HAGIWARA, Takumi MOCHIDA, Wataru SUGIMOTO2023 年18 巻1 号 p. 22-00269
発行日: 2023年
公開日: 2023/01/16
[早期公開] 公開日: 2022/11/10 ジャーナル オープンアクセス
ジャーナル オープンアクセスIn addition to the characteristics of soft actuators, such as flexibility and elasticity, biohybrid actuators also exhibit few distinctive functions, such as self-growth and self-healing. The previous research on biohybrid actuators has focused on culturing muscle cells and assembling them into micro-robots. These technologies are well-developed, however they lack the design and control methods found in the existing actuators that enable an appropriate performance. Therefore, we propose a simple muscle contraction model against external electrical stimulation, applying the model-based design and realizing the control of biohybrid actuators. The model comprises three sub-models—the electrical dynamic, physiological, and mechanical dynamic characteristics. The input of the model is the time-series stimulation voltage, and therefore, it can be applied to any complex stimulation waveform. The model parameters were identified with multiple square waves with different frequencies and amplitudes, based on the actual skeletal muscle of a toad. Subsequently, in the validation test, the actual muscle contraction was compared with the simulated force that was calculated using the identified parameters. Although the stimulations for the validation were different from those for the identification, the results obtained based on the model showed a good agreement with the experimental results. In addition, the optimal stimulation signal could be also calculated based on the model, to obtain the maximum net work. The findings of this study facilitate the development of model-based design and control methods for biohybrid actuators in the future, that will lead to significant development in this field.
Graphical Abstract Fullsize Image抄録全体を表示Editor's pick★Paper of the Year 2023
PDF形式でダウンロード (1642K) -
Sakito KOIZUMI, Toshiyuki NAKATA, Hao LIU2023 年18 巻1 号 p. 22-00347
発行日: 2023年
公開日: 2023/01/16
[早期公開] 公開日: 2022/11/19 ジャーナル オープンアクセス
ジャーナル オープンアクセスFlying insects are capable of hovering and rapid maneuver under unpredictable environments. The principal wing-beat is generated by transmitting the rhythmical contractions of power muscles to the exoskeleton and wing-base articulation. Fine-tuning of the flapping wing kinematics is achieved by deforming the articulation with tiny steering muscles. This flapping mechanism of insect flight is distinct from that of conventional man-made aerial vehicles, enabling superior flight. In this study, we propose an insect-inspired flapping mechanism, which is comprised of two different types of actuators and a flexible wing-base structure. The flapping mechanism is driven by electric motors, which modulate wing kinematics by adjusting the flexible wing-base structure using electromagnetic actuators (EMAs). First, the EMA design was optimized based on analysis of the dynamic forces and displacements to enable deformations of the wing-base structure. A prototype flapping mechanism was then constructed, and its performance was evaluated experimentally by adjusting the actuation phase of the EMAs being synchronized with flapping motions of the wing. The results indicate that the wingbeat kinematics and aerodynamic performance are noticeably sensitive to the actuation timing of EMAs and can thus be controlled by tuning the EMA actuating timing and direction. The flapping mechanism can potentially be applied as a novel means for controlling body posture of flapping-wing micro air vehicles to achieve insect-inspired stable flights in natural environments.
graphical abstract Fullsize Image抄録全体を表示Editor's pick★Paper of the Year 2023
PDF形式でダウンロード (7520K) -
Kazuto TAKASHIMA, Akinori NAMBA, Hiroto OTA, Yoichi HAGA, Makoto OHTA, ...2023 年18 巻1 号 p. 22-00276
発行日: 2023年
公開日: 2023/01/16
[早期公開] 公開日: 2022/12/08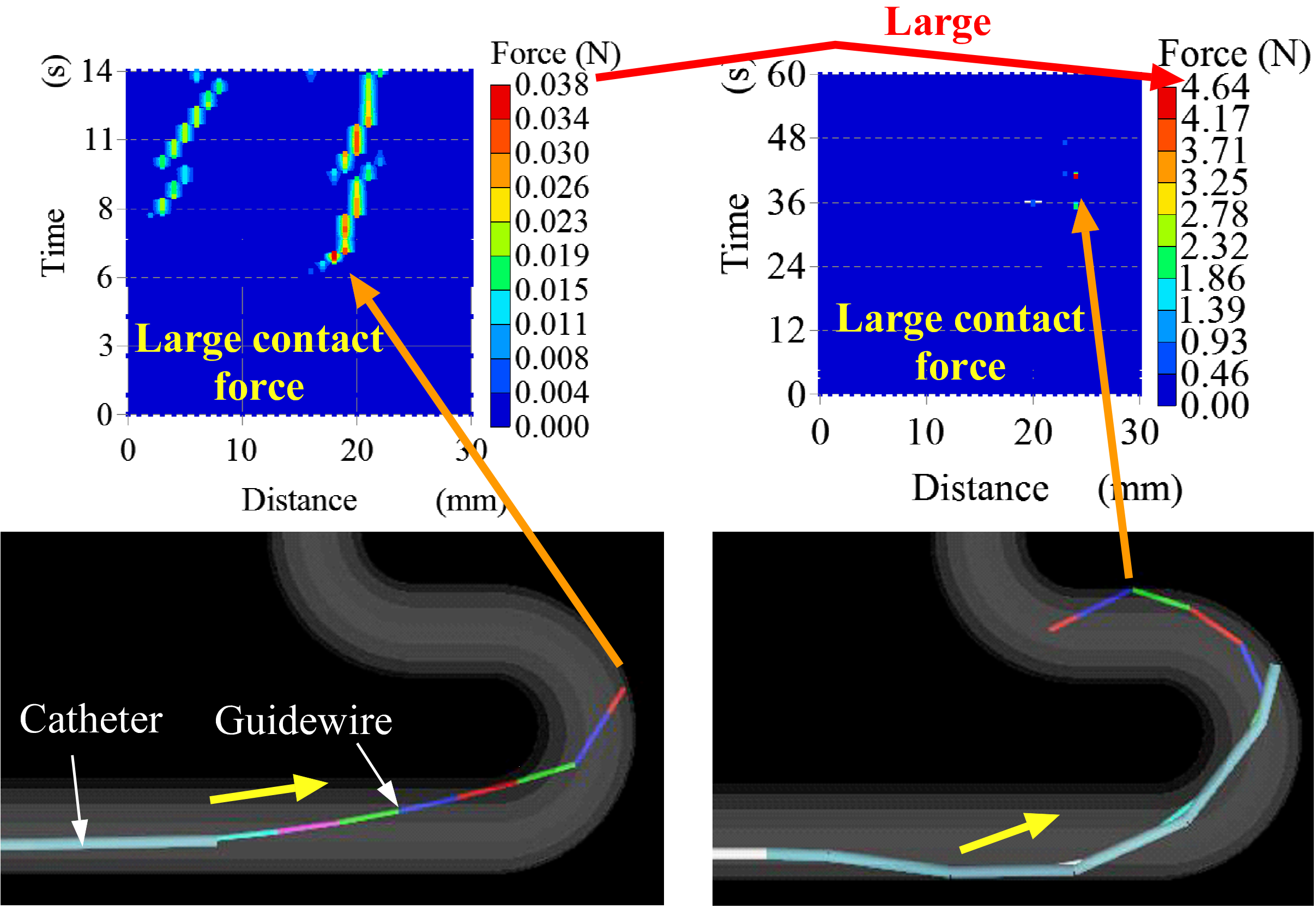 ジャーナル オープンアクセス
ジャーナル オープンアクセスA national questionnaire survey on guidewire penetration accidents by the Japanese Society for Neuroendovascular Therapy reported examples of perforation accidents occurring “during catheter introduction” (75.2% of accidents). In this study, we evaluated the behavior of a guidewire and a catheter during catheter introduction by numerical simulations, based on the results of the national survey. Using the contact force between the medical devices and the vessel wall, and the medical device position as criteria, we investigated the mechanism and the risk of penetration by the device tip during device introduction. We also evaluated the effects of the insertion velocity of the guidewire and the catheter. The contact force gradually increased during insertion of the guidewire, and the maximum contact force was observed after the guidewire passed through a bend in the blood vessel. After that, when introducing a catheter along the guidewire at the bend in the blood vessel, the guidewire imparted a greater load on the vessel wall than when the guidewire itself was introduced. This is the same tendency seen in our previous study and the national survey. One reason for the force increase during catheter introduction is a decrease in the contact area, which concentrates the contact force. Another reason for the force increase is that the bending stiffness of the guidewire covered by the catheter is the sum of the stiffnesses of the two devices, which is larger than that of only the guidewire. Different from guidewire introduction, as the insertion velocity of the catheter increased, the maximum contact force decreased under the influence of the bend shape and the contact force distribution. Moreover, the guidewire oscillated considerably when the catheter was introduced, and this oscillation increased as the insertion velocity increased, leading to a risk of mistakenly straying into a perforating branch.
Graphical abstract Fullsize Image抄録全体を表示PDF形式でダウンロード (2590K) -
Yuta MURAYAMA, Toshiyuki NAKATA, Hao LIU2023 年18 巻1 号 p. 22-00340
発行日: 2023年
公開日: 2023/01/16
[早期公開] 公開日: 2022/12/08 ジャーナル オープンアクセス
ジャーナル オープンアクセスFlying animals such as insects, bats, and birds have acquired the ability to achieve diverse and robust flight patterns in various natural environments. Their sophisticated morphologies, kinematics, and dynamics have motivated engineers to develop bioinspired flying robots. Particularly, the capabilities of morphing wing and tail controls in birds have received significant attention. Such controls are expected to introduce novel mechanisms to achieve flight stabilization while maintaining high maneuverability with a low energy cost. While the control of tail posture and motion is considered to exhibit a significant influence on flight performance, there have been few studies focusing on control with multiple degrees of freedom in small flying robots. In this study, we developed a bird-inspired morphing tail mechanism; a model was fabricated and investigated its aerodynamic performance through wind tunnel experiments. The results indicate that the tail attitude can be controlled effectively to enable the enhancement of aerodynamic performance in terms of mechanical efficiency and controllability. We also verified that controlling the tail attitude is redundant in the control of aerodynamic force and moment production, implying the potential capability to achieve stable flight control strategies in response to various disturbances. Therefore, our results indicate that tail-attitude-based aerodynamic control may be able to cope with the conflicting requirements of improving stability and maneuverability of flyers.
GraphicalAbstract Fullsize Image抄録全体を表示Editor's pick★Graphics of the Year 2023
PDF形式でダウンロード (4436K)
- |<
- <
- 1
- >
- >|