Abstract
Ni polycrystals were processed by accumulative roll-bonding (ARB) of 7 cycles and tensile specimens were cut from the ultra-fine grained (UFG) Ni after ARB. Microstructure and crystallographic orientation of UFG Ni were observed by scanning electron microscopy (SEM) and electron back scattering diffraction (EBSD) method. Three textures component, Copper, Brass and S orientations were found in UFG Ni.
Three specimens for tensile tests having tensile directions parallel with RD, TD and 45D were cut from UFG Ni. RD and TD indicate rolling and transverse directions of ARB process respectively, and 45D indicates a 45 degree direction between RD and TD. For these specimens, in-situ XRD measurements were performed during tensile deformation. Elastic strains during tensile deformation were calculated from values of peak shift for various diffraction planes obtained by the XRD measurements. For RD specimen, the elastic strains during initial deformation for various diffraction planes were almost the same. However, for 45D specimen, the elastic strains for various diffraction planes were different even at initial loading. TD specimen showed behavior like RD specimen. The difference in the elastic behavior between the specimens are discussed by considering difference in crystallographic directions of grains along tensile directions in the specimens which is caused by the textures generated after ARB.
1. 緒言
巨大ひずみ加工(Severe plastic deformation: SPD)により,結晶粒径が数μm未満の超微細な結晶粒で構成される金属多結晶を作製することができる1).SPDにはいくつか種類があるが,本研究では繰り返し重ね接合圧延(Accumulative roll bonding: ARB)法を用いる2).SPDを用いて加工した材料は通常の多結晶材料とは異なり,組織中に転位,粒界等が高密度に蓄積されているため,粗大粒に比べて組織や力学特性の特異性について様々な結果が報告されている3-5).しかし,このような成果にも関わらずSPDを用いて作製されたARB材の組織と弾性変形挙動の間の関係は未だ解明されていないことが多い.
圧延,線引き,押し出し等の塑性加工の場合と同じくSPD加工を施した材料においても集合組織が形成される.ARBを施した材料において形成される集合組織については多数報告されている6-8).また,集合組織は多結晶材料の力学特性に異方性をもたらす.FCC金属における弾性異方性はCu,Ni,Alの順に大きい9).そこで本研究では弾性異方性がCuやAlの中間に位置し,FCC金属の力学特性を考察する上でモデル材になり得るNiに着目した.そのため材料組織の評価に加え,引張方向が異なる3種類の試験片を切り出した.切り出し方向の違う試験片における力学特性の変化についての報告はいくつかある10-12)が,ARB加工をしたNiに関しては著者が知る限り報告例がない.そこで,Niについてそれらの変形挙動を比較することで,ARBにより形成された集合組織による力学特性の影響について調査した.
また近年,EBSD(Electron back scatter diffraction)解析を含む電界放出型走査電子顕微鏡法(Field emission - Scanning electron microscopy: SEM)の発展に伴い,結晶性材料の結晶方位解析を数10 nmステップで行うことができるようになった.そのため,多結晶金属材料の集合組織を含む組織を解析する上で,EBSDは必要不可欠な技術となっている.また今回はもう一つのアプローチとしてX線回折(XRD: X-ray diffraction)測定に着目した.XRDでは超微細粒材の平均的な結晶方位の情報(格子ひずみ等)を非破壊的に得ることができる.そのため,引張変形中にXRD測定を用いて得られるラインプロファイルを解析することにより変形中の超微細粒材内部における弾性変形挙動を把握することができる.しかし,ラボレベルのX線源を用いた場合には1スキャンですら数十分単位で測定に時間がかかるのでその場XRD測定は実質不可能であった.しかし,SPring-8のような大型放射光施設において高い強度を持つX線を用いることが可能となった13).それらを用いることで最短,約1 s間隔の測定ができるので引張変形中のその場XRD測定を行うことができるようになった14).
そこで本研究では,ARBを用いて作製された超微細粒Ni多結晶材の組織の情報を,SEM/EBSDとXRDを用いて明らかにすることを目的とした.また,その場XRD測定を行って得られたラインプロファイルを解析することで,集合組織による変形中の弾性変形挙動への影響を明らかにすることも目的とした.
2. 実験方法
2.1 ARB材の作製
2.1.1 出発材作製方法
供試材として純Ni(純度99.9 mass%)の板材を用いた.その板材を放電加工機を用いて板厚2 mm × 板幅50 mm × 全長100 mmに切断した.切断後,真空マッフル炉を用いて873 Kで1 h焼鈍を行った.これらの焼鈍材を以下で説明するARBの出発材として使用した.
2.1.2 繰り返し重ね接合圧延
2.1.1で示した手法により準備した出発材に対し,大型圧延機(ロール直径250 mm)を用いてARB加工を施した.このとき,室温,ロール周速2.0 m/min,潤滑条件で圧延を行った.そのため,ロール表面と試料表面との間の摩擦由来の付加的せん断ひずみの影響が少なく,板厚方向に均一な組織を得ることが出来る.ARB加工は一般に切断,表面処理,積層,接合圧延の4つの工程からなる.この4工程を1サイクルとし,N回繰り返した試料をNc ARB材と表す.本実験では7c ARB材Niを作製した.ARBサイクル数が増すにつれて板状試料の側面から割れが発生しやすくなるため,その防止に厚さが2 mmで幅が10 mm程度の板材を当て板として積層した板状試料の側面にワイヤーによって適宜固定し,割れを防止した.
2.1.3 試験片の切出し
2.1.2に記載のようにして作製した7c ARB材Ni(以下,ARB材)の試料座標系を以下のように定義する.Fig. 1に示すとおり,圧延方向(Rolling Direction: RD),板幅方向(Transverse Direction: TD),圧延面法線方向(Normal Direction: ND)である.更に本実験ではTDおよびRDの間,それらと45°の方向を45Dと定義する.また,RD,TD,ND,45Dを法線方向とする面をそれぞれRD面,TD面,ND面,45D面と呼ぶ.そして,Fig. 2(a)に示すように放電加工機を用いて3種類の引張試験片を切り出した.それぞれRD方向を引張方向とする試験片をRD試験片,TD方向を引張方向とする試験片をTD試験片とする.またND面上で45D方向を引張方向とする試験片を45D試験片とする.
切り出した試験片の形状と寸法をFig. 2(b)に示す.試験片の厚さ0.4 mmは,後に詳細に記すSPring-8でのXRD測定の場合,この厚さであればX線が透過することより決めた.その後,ひずみゲージを試料のゲージ部に貼り付けた.この際,ひずみゲージがX線の照射部分に重ならないように,ひずみゲージを中心部分からつかみ部方向へ少しずらした位置に貼り付けた.
2.2 引張変形中その場X線回折
2.2.1 引張試験条件
強力なX線を発生させることが可能な放射光施設であるSPring-8(Super Photon ring-8 GeV)のアンジュレータ光源を備えるBL46XUにおいて,引張変形中のその場X線回折測定を行った.今回の引張試験は大気中および室温の条件下において初期ひずみ速度8.3 × 10−5 s−1となるように行った.
2.2.2 引張変形中その場X線回折測定系
引張変形中その場X線回折のためにFig. 3に示すような測定系を用いた.多軸X線回折装置上に小型引張試験機を設置し,引張試験片を固定した.30 keVの単色X線(波長: λ = 0.041328 nm)を入射光とし,板状引張試験片のND方向から入射し,回折ピークを6連装MYTHEN(DECTRIS社製 一次元半導体検出器)を用いて測定した.MYTHEN1機には1280個の検出素子があり,素子の寸法は8000 μm × 50 μmである.この測定系により約1 s間隔でX線回折プロファイルを得ることが可能である.
2.3 組織観察
2.1.2で示した手法により作製した各試料のRD面,TD面,45D面に対して,SEM内でEBSD法による組織観察と結晶方位測定を行った.使用した装置はFE-SEM JSM-7001Fであり,加速電圧を15 kVとし,方位検出プログラムにはOIM(OIM Data Collection ver.7.0.1)を用いた.
組織観察用の試料はARB材からワイヤ-放電加工機により切り出し,エメリー紙で乾式研磨した後,電解研磨を行い鏡面仕上げとした.電解研磨は,硝酸(HNO3)とエタノールを体積比1:2で混合した33%ナイタールを用い,−40℃にて印加電圧6.5 Vの条件で約2 min行った.EBSD測定のステップ間隔は0.05 μmとした.
3. 実験結果
3.1 X線回折測定
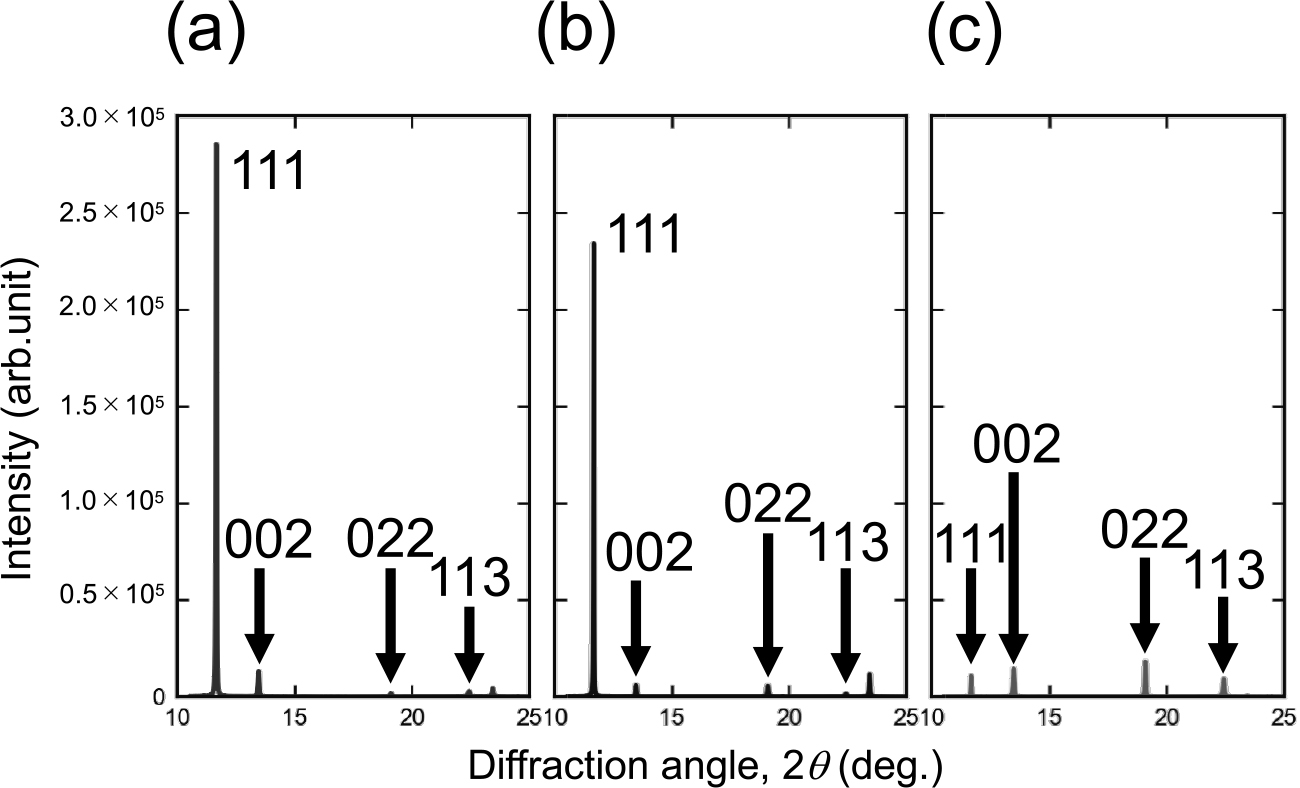
Fig. 4にRD試験片,TD試験片,45D試験片のX線回折のラインプロファイルの結果をそれぞれ(a)から(c)に示す.縦軸はそれらの素子が検出したX線強度,横軸は回折角2θを示す.Fig. 4には低角側から(111),(002),(022),(113)のピーク結果についてのみ示す.本論文ではこれら4つのピークに注目して考察を進める.
3.1.1 ピークフィッティング
Fig. 4で示した,RD,TD,45D各試験片においてX線回折のラインプロファイルに現れていた(111),(002),(022),(113)のピークに対してPearsonVII関数15)でピークフィッティングを行い,ピークの中心が現れる2θの値や半値幅などの情報を抽出した.PearsonVII関数は以下の式(1)で表される関数である.
| \[f(2\theta ) = a_0 {\left[1+ {\left(\frac{2 \theta - 2 \theta_{\rm c}}{\gamma} \right)}^2 \right]}^{- \mu}\] | (1) |
はピークの高さを表す変数,
γはピークの半値幅に関わる係数.
μはピークの形状に関わる変数,2
θcはピークの中心の位置を表す角度であり,これらは個々のピークに対して最適となるように決定された.
3.1.2 弾性ひずみの算出
X線回折のピークはBragg条件の式(2)を満たした回折角の位置に現れる.
| \[2d \sin \theta = \lambda \] | (2) |
ここで
dは回折面の面間隔を表し,
λはSPring-8におけるX線の波長を表す.式(2)の両辺を全微分すると,以下の式(3)のようになる.
| \[2 \sin \theta \times \delta \ d + d \cos \theta \times \delta (2 \theta ) = 0\] | (3) |
は面間隔の変化量を表し,
$\delta (2\theta )$はピークの中心位置の無負荷時からの変化量を表している.回折面法線方向の弾性ひずみ
εは面間隔の変化量
δdを無負荷時の初期面間隔
dで除したものであるので式(3)を変形することで以下の式(4)を得る.
| \[\varepsilon = \delta d/d = -(1/2) \times \cot \theta \times \delta (2 \theta )\] | (4) |
この式(4)と応力付加に伴うそれぞれの回折ピークの位置2
θcの変化である
$\delta (2 \theta )$をもとに各回折面法線方向の弾性ひずみ
εを算出することができる.今後,引張方向に対する各回折面のひずみの時間変化について議論するために,引張方向の伸びひずみ成分
εrを
εと回折角
θおよびポアソン比
νpを用いて以下の式(5)で表す.
εを
εrに座標変換する際の回転角度は幾何学的な関係により回折角
θと等しい.
| \[\varepsilon_r = \varepsilon / (\cos ^2 \theta - \nu _p \ {\sin}^2 \ \theta )\] | (5) |
Niのポアソン比
νpは0.31とした
16).
Fig. 5(a)から(c)はクロスヘッド速度を一定とした引張変形中その場XRD測定により得られた,(111),(002),(022),(113)ピークに対応する回折面についてのεrの外部応力σに伴う変化である.この応力σは,通常の場合と同じく,試験機のロードセルで検出された力より求めた.応力-ひずみ曲線の通例とは異なり,これらの図では横軸が応力σになっている.これはσの変化に伴うεrの変化が今回の関心であることからそうした.εrはピークの中心位置の変化を式(5)より計算した.Fig. 5(a),(b),および(c)はそれぞれRD試験片,TD試験片,45D試験片についての計算結果を示したものである.これらの結果を比較すると,応力が付加されるに伴い,(a)のRDと(b)のTDはεrが初めは同じ値を示しながら徐々に異なる値に変化していく.しかしTDはRDに比べるとεrが変形の途中からバラついていく.RD試験片では付加応力が約400 MPa,TD試験片では約300 MPaからεrが変化し始めている.それに対して,45Dの場合,付加応力が300 MPaに達したあたりから大幅に異なる値を示しながら変化していくというRD,TD試験片とは異なる現象が観察された.45D試験片では付加応力が約200 MPaから変化し始めている.このことについては次章の考察にて詳しく述べる.
またFig. 5中では黒の実線と点線は,それぞれ,弾性的に異方性を持つNi単結晶におけるヤング率の上限値と下限値に対応する場合のεrとσの線型関係を示している.Fig. 5に示す実験結果は,線型的な挙動を示す範囲でこれらのあいだにあり,合理的なものとなっている.ヤング率に関しての詳細は4.3.1で述べる.
3.2 ARB材のEBSD組織観察
2.3で示したSEM/EBSDを用いてARB材のRD面,TD面,45D面の結晶方位情報測定を行った.その結果,RD面,TD面,45D面の測定点の座標と,その地点における結晶方位を得ることができた.
3.2.1 IPF map (Inverse pole figure map)
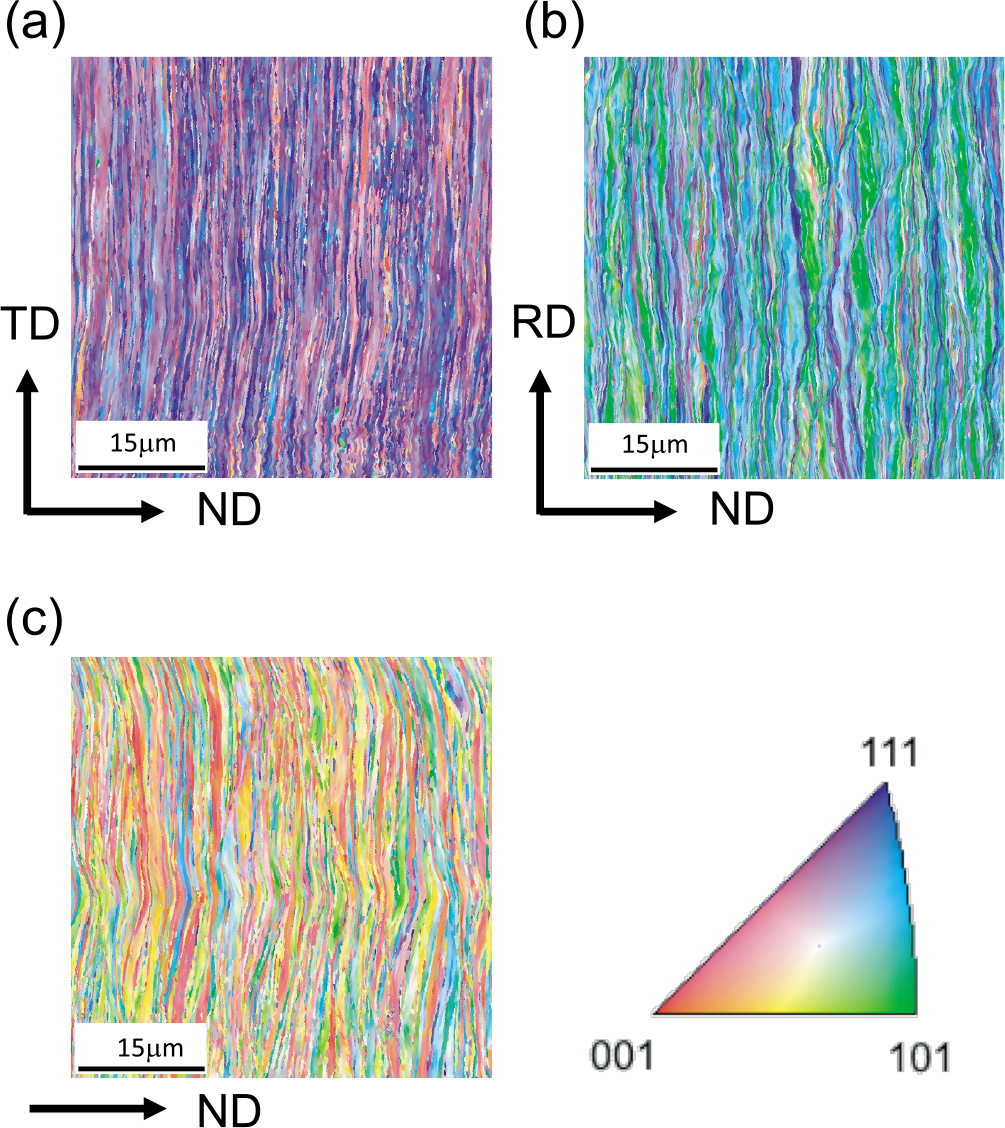
Fig. 6にARB材に含まれる数多くの結晶粒についてのIPF mapを結晶方向を表現するためのカラーキーと共に示す.測定点はそれぞれの面で数10万~100万点存在する.Fig. 6(a)に示すRD面ではRDと<111>が平行に近い結晶粒が多く,(b)に示すTDは<111>もしくは<101>に平行な結晶粒が多い.(c)に示す45D面の場合,それらの方向と平行に近い高頻度の結晶学的方向は特に見られない.
4. 考察
4.1 ARB材に存在する集合組織
4.1.1 圧延集合組織
金属材料の集合組織は塑性加工や再結晶などの際に形成され,力学特性に異方性を与えることが多い.圧延材のように圧延面法線方向,圧延方向に沿って優先方位が発達するような場合には,圧延面(ND)法線方向と圧延方向(RD)のミラー指数を用いて{hkl}<uvw>のように表す.FCC金属における代表的な圧延集合組織を以下に示す.銅方位(Copper orientation):{112}<111>,黄銅方位(Brass orientation):{110}<112>,S方位(S orientation):{123}<634>などが挙げられる17).過去の研究ではこれら三つの結晶方位がARB加工をしたNiに多く存在すると報告されている18).そのため,以下ではこれらの結晶方位に注目して解析を進める.
4.1.2 RD面に存在する結晶方位の解析
2.3で行ったSEM/EBSDの測定結果によりARB材の各面における,測定点ごとの結晶方位情報を得ることができた.そのうちRD面における結晶方位情報を用いて,ARB材に含まれる圧延集合組織の割合をOIMで解析した.今回の解析ではRD面に存在する測定点の結晶方位と圧延集合組織との方位差を計算し,方位差が15°以内であればその集合組織に属するとみなした.そして,ある集合組織に属する測定点の数を全測定点数で割った値をARB材に存在するその集合組織の割合であるとした.解析の結果,Copper方位は40.0%,Brass方位は27.2%,S方位は66.8%存在すると分かった.三つの方位の割合の総和をとると134.0%となり,100%を越えている.これは方位差の臨界角を15°としたために,S方位とCopper方位,S方位とBrass方位の二つの集合組織に重複して属する結晶方位が存在したためである.S方位とCopper方位に重複して属するものは23.1%,S方位とBrass方位に重複して属するものは15.2%である.それら重複した割合を先程の割合の総和から引くと95.7%である.そのため,RD面に存在する測定点のほとんどは3つのグループに分けることができたと考えられる.以上よりARB材は三つの集合組織で主に占められているが,中でもS方位が多く存在すると分かった.
4.2 ARB材の各面に存在する面法線の結晶方向の比較
3.2でも述べたようにFig. 6(a)に示すRD面,(b)に示すTD面にはそれらの面法線方向に特定の結晶方向が多く存在する.これらは加工に伴って形成された集合組織の影響だと考えられる.その集合組織とは4.1で述べたCopper方位,Brass方位,S方位の3つである.しかし(c)に示す45D面ではRD面,TD面とは異なり,特定の結晶方向が多く存在しているように見えない.以下ではこの理由について結晶学的な方位関係から考察する.
4.2.1 RD面,TD面に存在する代表的な結晶方向
以下では簡単のために,試料座標系におけるRD面法線方向の結晶方向をRDc,同様にTD面法線方向の結晶方向をTDc,45D面法線方向の結晶方向を45Dcとする.4.1で述べたようにARB材ではCopper方位,Brass方位,S方位の三つが主な集合組織である.それら三つの方位についてのRD面法線方向とTD面法線方向は,RDcでは<111>,<112>,<634>近傍,TDcでは<101>,<111>,<9 17 22>近傍の結晶方向となる.
4.2.2 45D面に存在する代表的な結晶方向
4.2.1ではARB材の代表的なRDc,TDcを述べた.それをもとに,45D面にどのような結晶方向が現れるのかを結晶学的に考察した.その結果をFig. 7に示す.
Fig. 7は001ステレオ投影図に各結晶方位のRDc,TDc,45Dcをプロットしたものである.(a)にはCopper方位,(b)にはBrass方位,(c)にはS方位の場合を表している.RDcは●,TDcは▲,45Dcは■または◆のシンボルで表す.またRDc,TDcの組み合わせを表現する際に,以下ではこのように書き表す.例えばCopper方位はRDcに[111],TDcに$[10 \bar 1]$を持つ.その場合は[111]-$[10 \bar 1]$と書き表し,その組み合わせを結晶方向ペアと呼称する.
Fig. 7(a)に示すCopper方位ではRDcを[111]とする.Copper方位におけるTDcは<101>であるが,それらのうち[111]との直交条件を満たすものは図中では$[\bar 110]$,$[ \bar 101]$,$[0 \bar 11]$,$[1 \bar 10]$の4つである.そして[111]-$[ \bar 110]$等,4つの結晶方向ペアがなす45Dcは全て<2 9 20>近傍となる.
次に,Fig. 7(b)に示すBrass方位ではTDcを[111]とする.Brass方位におけるRDcは<112>であるが,そのうち[111]との直交条件を満たすものは$[ \bar 211]$,$[ \overline{11} 2]$,$[1 \bar 21]$の3つである.この三つの中で$[ \bar 211]$-[111],$[1 \bar 21]$-[111]の結晶方向ペアの45Dcは<144>近傍である.しかし,$[ \overline{11} 2]$-[111]の結晶方向ペアが持つ45Dcは[4 4 34]となる.つまり同じBrass方位であっても結晶方向ペア次第では45Dcが異なることが分かる.
最後に,Fig. 7(c)に示すS方位ではRDcが[346]と$[34 \bar 6]$の二つの場合を考える.S方位のTDcは<9 17 22>であるので直交条件を満たす結晶方向ペアは[346]-$[ \overline{22} \ \bar 9 \ 17]$,$[34 \bar 6]$-[22 9 17]の2つである.これらのペアの45Dcはそれぞれ$[ \bar 9 \ 5 \ 32]$,[12 9 2]である.つまりBrass方位と同様に結晶方向ペアによって45Dcが異なる.
以上より,同じ集合組織であっても結晶方向ペア次第では45Dcが異なることがあると分かった.よって代表的な45Dcは<2 9 20>,<144>,<4 4 34>,<5 9 32>,<2 9 12>の5つであると考えられる.Fig. 6(c)に示す45D面のIPF mapにおいて,他の面と異なり特に優先的に存在する結晶方向が見られなかったのはこのためであると考えられる.
4.3 集合組織と弾性異方性が各試験片の引張方向のヤング率に与える影響
今回用いたNiは同じFCC金属のAlに比べて弾性異方性を強く持つ材料である.ところで,Fig. 6から分かるようにARB材NiのRD面が持つRDcの分布,TD面が持つTDcの分布,45D面が持つ45Dcの分布はそれぞれ異なる.そのためARB材をRD方向,TD方向,45D方向にそれぞれ引張った際に,弾性的な挙動が各試験片で異なると考えられる.以下では4.1で行ったように,SEM/EBSDより得られた各面の結晶方位情報を用いてヤング率に注目し解析を進めていく.
4.3.1 立方晶構造を持つ物質のヤング率
ヤング率の異方性についてNyeの教科書19)やReidの教科書20)等で過去に述べられている.これらの文献では,立方晶構造を持つ物質のヤング率Eの方向依存性が[100],[010],[001]を主軸とする座標系とこの座標系の元での引張方向に平行なベクトル(h, k, l)を使って,弾性コンプライアンスSijの関数として以下のように示されている.
| \[F(h,k,l) = (h^2 k^2 + k^2 l^2 + l^2 h^2) / {(h^2 + k^2 + l^2)}^2\] | (6) |
| \[\frac{1}{E^{hkl}} = S_{11} - 2 \left( S_{11} - S_{12} - \frac{1}{2} S_{44} \right) F(h,k,l)\] | (7) |
上記の式を弾性スティッフネス
Cijの成分を使って書くと以下のようになる.
| \[E^{hkl} = \frac{(C_{11} - C_{12})(C_{11} + 2 C_{12}) C_{44}}{(C_{11} + C_{12})C_{44} + (C_{11} + 2 C_{12})(C_{11} - C_{12} - 2 C_{44})F(h,k,l)}\] | (8) |
式(8)は<hkl>方向を引張方向とした際のヤング率の値を表現している.Niの場合,C11,C12,C44の文献値はそれぞれ247 GPa,147 GPa,125 GPaである21).これらの値より,ヤング率の上限(最大値,Emax)は引張方向を<111>とした際の304 GPa,下限(最小値,Emin)は<001>とした時の136 GPaとなる.
4.3.2 RD面,TD面,45D面,各面におけるヤング率の分布の算出
3.2で述べたSEM/EBSD測定によりRD面,TD面,45D面,各面の測定点における座標と,その地点における結晶方位情報を得ることができる.それらが含まれたデータをテキストファイルとして抽出した.解析の際に用いたのはRD面のRDc,TD面のTDc,45D面の45Dcの情報である.また解析にはプログラミング言語「R」22)を用いて作成した自作プログラムを使用した.
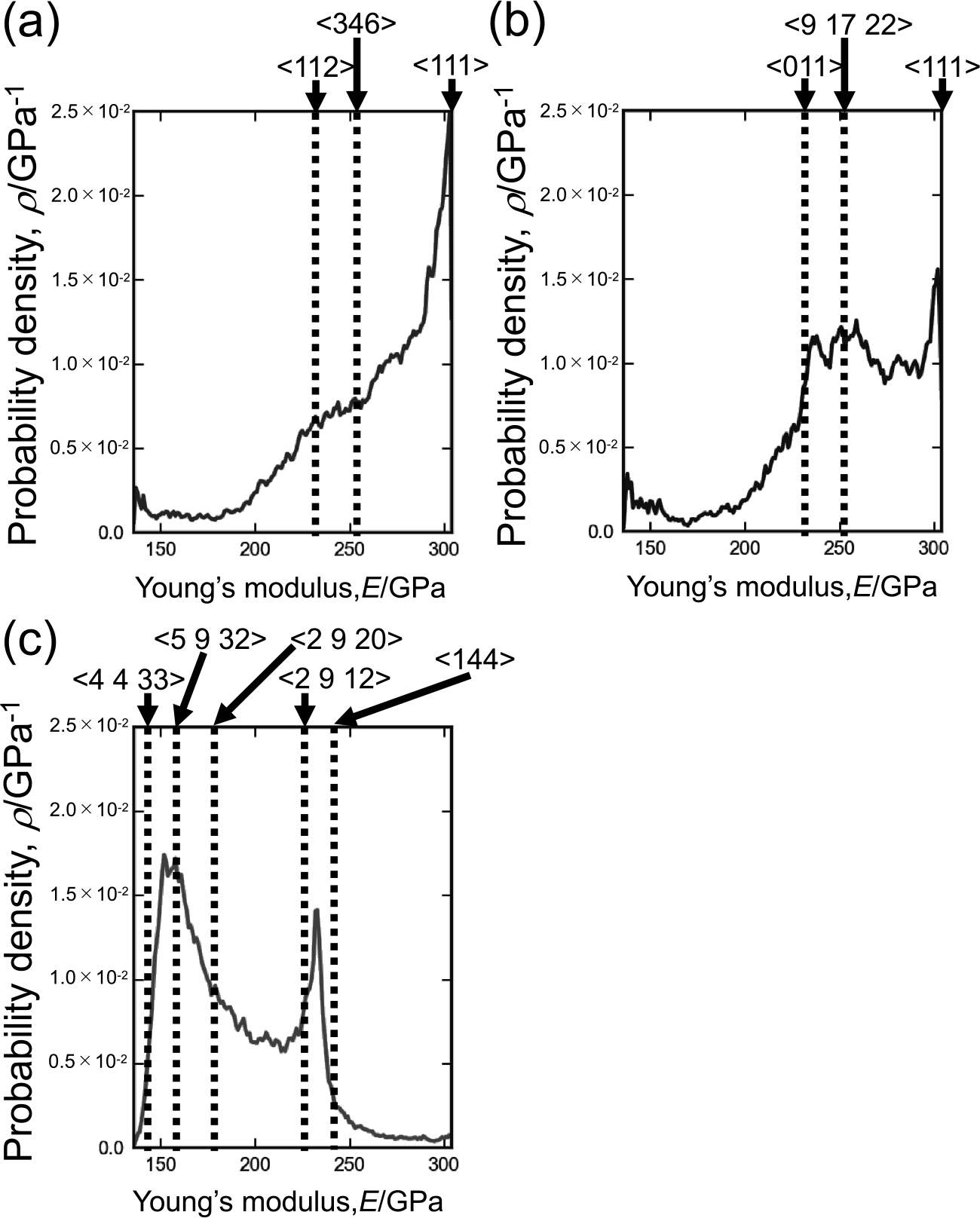
4.3.1で示した式(8)より,引張方向の結晶方向を引数として,その方向に引張った際のヤング率を求めることができる.今回の解析では式(8)の引数である(h, k, l)に抽出したRD面のRDc,TD面のTDc,45D面の45Dcを代入した.それにより,各面の測定点ごとの引張方向のヤング率の値を求めることができた.その結果をFig. 8に示す.
Fig. 8は各面にある値のヤング率がどれだけの割合存在するのかを表したものである.横軸の範囲はEmaxの304 GPaとEminの136 GPaとしている.縦軸にはそのヤング率の値の割合を確率密度ρで表した.このρを使うと,ヤング率がEとE + dEの間になる割合(確率)はρ(E) × dEとなる.またρは以下の式(4)を満足する.
| \[\int_{E_{\min}}^{E_{\max}} \rho \ {\rm d}E = 1 \] | (9) |
には,4.2で述べた各面に存在する代表的な結晶方向を記し,それらの方向のヤング率を示した.
(1) RD面における結果
Fig. 8(a)に示すRD面の結果ではヤング率が300 GPa近傍での確率密度ρが高い値であることが分かる.ところで,4.2でも述べたようにRD面における代表的なRDcは<111>,<346>,<112>である.それらの方向のヤング率は式(8)より,それぞれ304 GPa,255 GPa,233 GPaである.(a)に示すRD面ではそれら3つに近いヤング率の値を持つ測定点の割合が多く存在することが分かる.しかし,そのなかでもRDcが<111>近傍である測定点が多かったためにヤング率が304 GPaに近い値を持つ割合が多く存在したと考えられる.
(2) TD面における結果
Fig. 8(b)に示すTD面の結果ではヤング率が250 GPa,300 GPaとなる確率密度が高い割合を占めていることが分かる.ところで,4.2でも述べたようにTD面における代表的なTDcは<101>,<9 22 17>,<111>である.それらの方向のヤング率は式(8)より,それぞれ233 GPa,252 GPa,304 GPaである.Fig. 8(b)を見ると300 GPa,250 GPaに近い値を持つ測定点の割合が特に多く存在することが分かる.この結果からもTD面の代表的なTDcが<111>,<9 22 17>近傍の結晶方向だと分かる.
(3) 45D面における結果
Fig. 8(c)に示す45D面の結果ではヤング率が155 GPa,233 GPaとなる確率密度が高いことが分かる.また,4.1でも述べたように45D面における代表的な45Dcは<2 9 20>,<9 5 32>,<2 9 12>,<4 4 33>,<1 4 4>であり,それらの方向のヤング率は式(8)より,それぞれ180 GPa,159 GPa,226 GPa,143 GPa,242 GPaである.つまり(c)に示す45D面の結果でヤング率が155 GPa,233 GPaに近い値を持つ測定点の割合が多かったのは,45Dcに存在する代表的な結晶方向がそれら5つであったためと考えられる.
以上の結果をまとめる.RD面ではRDcが<111>近傍となるものが多いために,結果としてヤング率が300 GPa近傍となる測定点が多数を占めている.TD面ではTDcが<111>,<9 17 22>近傍となるものが多いために,結果としてヤング率が250,300 GPa近傍となる測定点が多数を占めている.45D面では45Dcが<2 9 20>,<5 9 32>,<2 9 12>,<4 4 33>,<1 4 4>近傍となるものが多い.しかし,<4 4 33>,<5 9 32>,<2 9 20>はヤング率が155 GPa近傍に位置する.また<144>,<2 9 12>はヤング率が233 GPa近傍である.その結果としてヤング率が155 GPa,233 GPa近傍となる測定点が多数を占めたと考えられる.
ここで,引張方向のヤング率の値に応じて以下のように結晶粒をグループ分けする.引張方向のヤング率が136~178 GPaのものをSoft grain(SG),178~220 GPaのものをMiddle soft grain(MSG),220~262 GPaのものをMiddle hard grain(MHG),262~304 GPaのものをHard grain(HG)とする.以下ではそれらを結晶粒グループと呼ぶ.RD面,TD面,45D面において各結晶粒が占める割合をTable 1にまとめた.Table 1に示す割合というのはFig. 8に示した縦軸の割合を各結晶粒グループが属するヤング率の下限(136 GPa)から上限の(304 GPa)で積分したものである.RD面のHGにおいての例を以下に示す(EHGL = 262 GPa,EHGU = 304 GPa).
| \[\int_{E_{\rm HGL}}^{E_{\rm HGU}} \rho \ {\rm d}E = 0.567 \] | (10) |
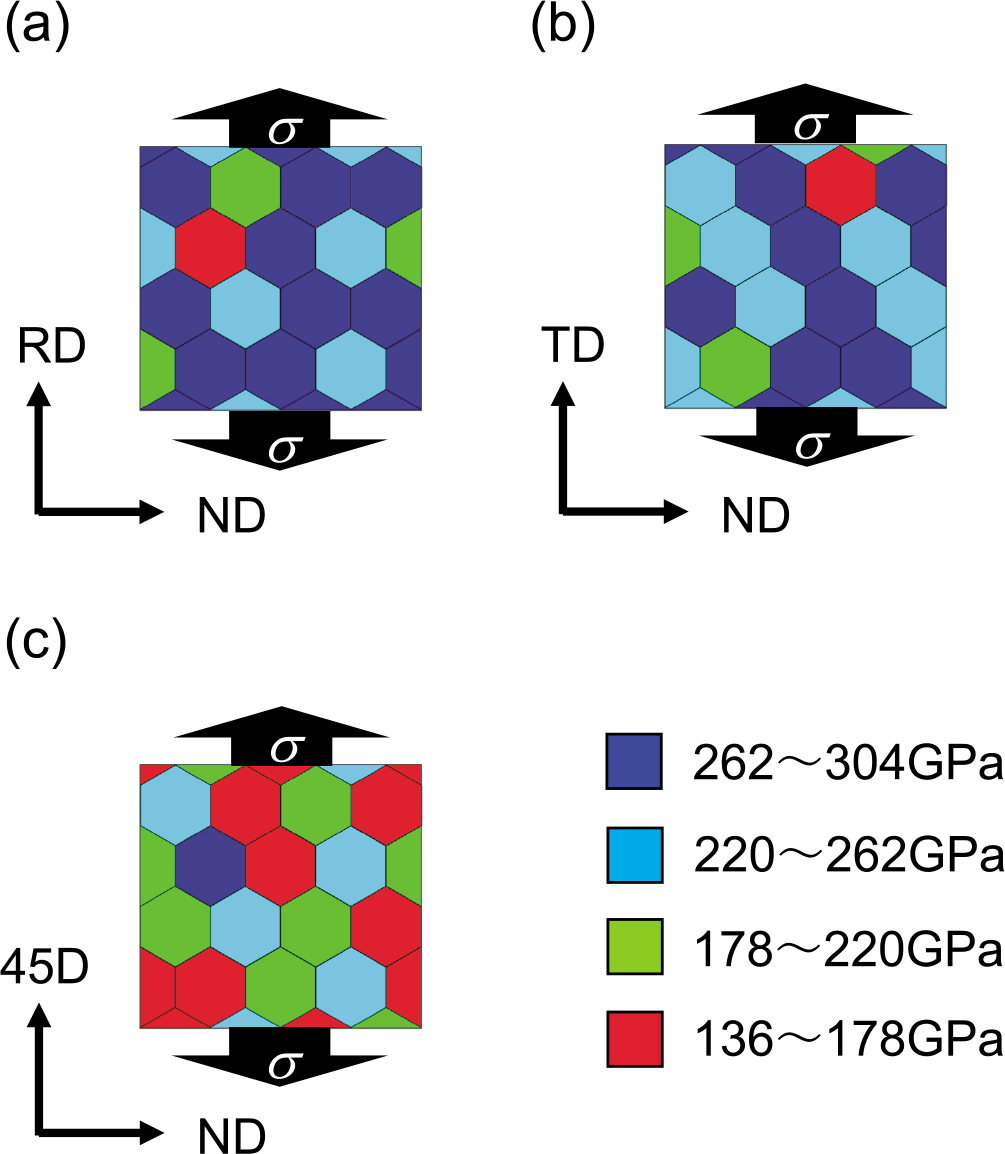
Table 1に示すようにRDはHGにほぼ占められている.TD面はHGとMHGの2グループにほぼ同じ割合で占められている.一方で45D面はMHとMSG,SGの3つのグループで占められていることが分かる.その状態における各試験片を表した模式図がFig. 9である.
Fig. 9では各試験片の引張方向(RD試験片ならばRD方向)とND方向が成す平面を見たときの結晶粒の様子を表現している.六角形で示される結晶粒の色は引張方向のヤング率を表す.図にも示したように,青色の結晶粒グループはHG,水色はMHG,緑色はMSG,赤色はSGを表現している.図中に示す結晶粒の個数はTable 1においての結果を反映している.
ここでパーコレーションについて考えてみたい.仮に2種類の結晶粒(A,B)で占められる材料が存在したとする.結晶粒Aは母相で,Bは強化相とする.Aが占める体積分率が100%であれば全体の力学的性質はAの影響しか存在しない.しかし,Aが90%を占めている状態でBが10%存在したとしても全体の力学特性にBが大きく影響を与えるとは考えにくい(Bが90%存在してAが10%存在する場合も同様).つまりBがAに対して“ある値”以上存在しなければ全体の力学特性に影響を与えず,“材料中には結晶粒Aしか存在しない”と見なせる場合もあるだろう.
このように母相中に別の相を混合していく際に,体積分率がある値を越えてから物性値が急激に発現するという現象は“パーコレーション”と呼ばれ,複合材料の分野ではパーコレーション理論に基づく考察がされている23-25).これをFig. 5における各試験片の弾性変形挙動の違いを説明するのに適用する.
Fig. 9(a)に示すRD試験片は青色の結晶粒グループの割合が高く,次いで水色の割合が高い.他の色で表現される結晶粒グループも存在するが,青色に比べれば占める割合は低い.この結果よりFig. 5(a)のRD試験片の弾性変形挙動について以下のように解釈する.RD試験片中では緑色,赤色で表される結晶粒グループも存在するが,その割合は低い.割合の低い結晶粒グループは弾性変形の際に割合の高い結晶粒と多く接し,粒界からの拘束を受ける.そのために割合の多い結晶粒グループと同様の挙動を要求される.つまりFig. 9(a)に示すような状態にも関わらず,RD試験片は青色の結晶粒グループに占められた状態に等しくなるということである.その結果としてFig. 5(a)に示すようにRD試験片では等ひずみに近い状態が達成されたと考える.
Fig. 9(b)に示すTD試験片では青色と水色の2種類の結晶粒で主に占められており,どちらも同程度の割合存在している.そして模式図に示す通り,青色グループも水色も存在する割合が多い.結果としてそれら以外の結晶粒グループは弾性異方性を発現することができず,青色と水色の弾性変形挙動に支配される.そのため,互いに影響を与えあうことにより弾性ひずみが結晶粒によって異なると考えられる.そしてFig. 5(b)に示すようにTD試験片は回折面ごとの弾性ひずみがRD試験片に比べるとバラついていたのではないかと考えられる.
しかし,Table 1に示すように45D試験片では3種類の結晶粒グループに占められている.3つのいずれのグループも占める割合が多く,全体の力学特性に影響を与えると考えられる.それらを表したものがFig. 9(c)である.青色で示される結晶粒は極めて少ないと分かる.そのため,青色の結晶粒グループは他の各結晶粒グループに強く影響を受ける.しかし,それ以外の結晶粒グループはどれも存在を無視できないので,互いに影響を与えあう.そして弾性変形中に結晶粒グループごとに弾性ひずみが異なってしまったのだと考えられる.その結果としてFig. 5(c)に示す45D試験片の結果のように弾性ひずみ量が変形の初期から異なっていたのだと考えられる.
5. 結言
ARBを用いてNiの超微細粒材を作製し,引張方向の違う試験片を3種類作製した.組織の情報をSEM/EBSDとXRDを用いて明らかにした.RD面にはRD方向と<111>が平行に近い結晶粒が多く,TD面には<111>もしくは<101>に平行な結晶粒が多い.45D面の場合,それらの方向と平行に近い高頻度の結晶学的方向は特に見られない.それはNiのARB材が主に3つの集合組織,Copper方位,Brass方位,S方位で占められたためと分かった.
引張変形中その場XRD測定を行った.応力の付加に伴い,RD試験片はεrが初めは同じ値を示しながら徐々に異なる値に変化してゆく.TD試験片はRD試験片に比べると,より早期にεrが異なる値に変化する.それに対して,45D試験片の場合,応力を付加した初期から異なる値を示しながら変化してゆく.この結果について考察した.
RD試験片は引張方向のヤング率が262~304 GPaであるHGが多数存在するために,他の結晶粒もその挙動に引きずられて各結晶粒での弾性ひずみが等しくなったと考えられる.TD試験片ではHGのみならずMHGも多く存在したので,RD試験片に比べると各結晶粒の弾性ひずみが多少異なったと考えられる.一方で45D試験片の場合はMHG,MSG,SGといくつかの結晶粒グループが混在しているために結晶粒ごとの弾性ひずみが顕著に異なったと考えられる.
この研究は,SPring-8のBL46XUにおいて,公益財団法人高輝度光科学研究センターの承認のもとに行われた事を記し,謝意を表します(産業利用分野 課題番号:2016A1674,2014A1696,2013B1706).また,実験とプログラミングに関して小ケ倉勇樹氏(東京工業大学大学院)より大きな支援を受けました.
文献
- 1) N. Tsuji, Y. Saito, S.‐H. Lee and Y. Minamino: Adv. Eng. Mater. 5(2003) 338-344.
- 2) Y. Saito, N. Tsuji, H. Utsunomiya, T. Sakai and R. G. Hong: Scr. Mater. 39(1998) 1221-1227.
- 3) T. Kunimine, T. Aragaki, T. Fujii, S. Onaka and M. Kato: J. Mater. Sci. 46(2011) 4302-4307.
- 4) X. Huang, N. Hansen and N. Tsuji: Science 312(2006) 249-251.
- 5) N. Tsuji, Y. Ito, Y. Saito and Y. Minamino: Scr. Mater. 47(2002) 893-899.
- 6) Y. Miyajima, D. Kashioka and N. Tsuji: Mater. Trans. 58(2017) 1127-1133.
- 7) N. Takata, K. Yamada, K. Ikeda, F. Yoshida, H. Nakashima and N. Tsuji: Mater. Trans. 48(2007) 2043-2048.
- 8) Y. Miyajima, M. Uchiyama, H. Adachi, T. Fujii, S. Onaka and M. Kato: Mater. Trans. 57(2016) 1411-1417.
- 9) S. I. Ranganathan and M. Ostoja-Starzewski: Phys. Rev. Lett. 101(2008) 1-4.
- 10) F. Shen, D. Yi, B. Wang, H. Liu, Y. Jiang, C. Tang and B. Jiang: Mater. Sci. Eng. A 675(2016) 386-395.
- 11) P. Chekhonin, J. Scharnweber, M. Scharnweber, C.-G. Oertel, T. Hausöl, H. W. Höppel, J. Jaschinski, T. Marr and W. Skrotzki: Cryst. Res. Technol. 48(2013) 532-537.
- 12) J. Scharnweber, W. Skrotzki, C.-G. Oertel, H.-G. Brokmeir, H. W. Höppel, I. Topic and J. Jaschinski: Adv. Eng. Mater. 12(2010) 989-994.
- 13) “BL46XU abstract - SPring8 Web site”, http://www.spring8.or.jp/wkg/BL46XU/instrument/lang/IN_S0000000556/instrument_summary_view, (accessed 2018-10-02).
- 14) Y. Miyajima, S. Okubo, T. Miyazawa, H. Adachi and T. Fujii: Philos. Mag. Lett. 96(2016) 294-304.
- 15) S. K. Gupta and B. D. Cullity: Adv. in X-Ray Anal. 23(1980) 333-339.
- 16) W. Betteridge: Nickel and its alloys, (Halsted Press, Sydney, 1984).
- 17) C. S. Lee, B. J. Duggan and R. E. Smallman: Acta Metall. Mater. 41(1993) 2265-2270.
- 18) P. P. Bhattacharjee, N. Tsuji and R. K. Ray: Metall. Mater. Trans. A 42(2011) 2769-2780.
- 19) J. F. Nye: Physical Properties of Crystals, (Oxford University Press, 1957).
- 20) C. N. Reid: Deformation Geometry for Materials Scientists, (Pergamon Press, Oxford, 1973).
- 21) S. Nagashima: Texture, (Maruzen Publishing, Tokyo, 1984) pp. 262-263.
- 22) “R: The R Project for Statistical Computing”, https://www.r-project.org.
- 23) M. Inoue: Journal of the Adhesion Society of Japan 47(2011) 23-34.
- 24) M. T. Connor, S. Roy, T. A. Ezquerra and F. J. Baltá Calleja: Phys. Rev. B 57(1998) 2286-2294.
- 25) S. Nakamura, K. Saito, G. Sawa and K. Kitagawa: JPN. J. Appl. Phys. 36(1997) 5163-5168.