Review Papers
Hydrostatic and Shear Behavior of Frictionless Granular Assemblies under Different Deformation Conditions
2013 年 30 巻 p. 84-108
詳細
2013 年 30 巻 p. 84-108
Stress- and structure-anisotropy (bulk) responses to various deformation modes are studied for dense packings of linearly elastic, frictionless, polydisperse spheres in the (periodic) triaxial box element test configuration. The major goal is to formulate a guideline for the procedure of how to calibrate a theoretical model with discrete particle simulations of selected element tests and then to predict another element test with the calibrated model (parameters).
Only the simplest possible particulate model material is chosen as the basic reference example for all future studies that aim at the quantitative modeling of more realistic frictional, cohesive powders. Seemingly unrealistic materials are used to exclude effects that are due to contact non-linearity, friction, and/or non-sphericity. This allows us to unravel the peculiar interplay of stress, strain, and microstructure, i.e. fabric.
Different elementary modes of deformation are isotropic, deviatoric (volume-conserving), and their superposition, e.g. a uniaxial compression test. Other ring-shear or stress-controlled (e.g. isobaric) element tests are referred to, but are not studied here. The deformation modes used in this study are especially suited for the bi- and triaxial box element test set-up and provide the foundations for understanding and predicting powder flow in many other experimental devices. The qualitative phenomenology presented here is expected to be valid, even clearer and magnified, in the presence of non-linear contact models, friction, non-spherical particles and, possibly, even for strong attractive/ adhesive forces.
The scalar (volumetric, isotropic) bulk properties, the coordination number and the hydrostatic pressure scale qualitatively differently with isotropic strain. Otherwise, they behave in a very similar fashion irrespective of the deformation path applied. The deviatoric stress response (i.e. stress-anisotropy), besides its proportionality to the deviatoric strain, is cross-coupled to the isotropic mode of deformation via the structural anisotropy; likewise, the evolution of pressure is coupled via the structural anisotropy to the deviatoric strain, leading to dilatancy/compactancy. Isotropic/uniaxial over-compression or pure shear respectively slightly increase or reduce the jamming volume fraction below which the packing loses mechanical stability. This observation suggests a necessary generalization of the concept of the jamming volume fraction from a single value to a “wide range” of values as a consequence of the deformation history of the granular material, as “stored/memorized” in the structural anisotropy.
The constitutive model with incremental evolution equations for stress and structural anisotropy takes this into account. Its material parameters are extracted from discrete element method (DEM) simulations of isotropic and deviatoric (pure shear) modes as volume fraction dependent quantities. Based on this calibration, the theory is able to predict qualitatively (and to some extent also quantitatively) both the stress and fabric evolution in another test, namely the uniaxial, mixed mode during compression. This work is in the spirit of the PARDEM project funded by the European Union.
Dense granular materials are generally complex systems which show unique mechanical properties different from classic fluids or solids. Interesting phenomena such as dilatancy, shear-band formation, history dependence, jamming and yield stress - among others - have attracted significant scientific interest over the past decade. The bulk behavior of these materials depends on the behavior of their constituents (particles) interacting through contact forces. To gain an understanding of the deformation behavior, various laboratory element tests can be performed (GdR-MiDi, 2004; Samimi et al., 2005; Schwedes, 2003). Element tests are (ideally homogeneous) macroscopic tests in which the experimentalist can control the stress and/or strain path. Different element tests on packings of bulk solids have been realized in the biaxial box (see Morgeneyer and Schwedes, 2003, and references therein) while other deformation modes, namely uniaxial and volume-conserving shear, have been reported in Philippe et al., 2011 and Saadatfar et al., 2012. While such macroscopic experiments are pivotal to the development of constitutive relations, they provide little information on the microscopic origin of the bulk flow behavior of these complex packings.
The complexity of a granular assembly becomes evident when it is compressed isotropically. In this case, the only macroscopic control parameters are volume fraction and pressure (Göncü et al., 2010). At the microscopic level for isotropic samples, internal variables must be added to classify the microstructure (contact network), namely the coordination number (i.e. the average number of contacts per particle) and the fraction of rattlers (i.e. fraction of particles that do not contribute to the mechanical stability of the packing), see Göncü et al., 2010; Magnanimo et al., 2008. However, when the same material sample is subjected to shear deformation, not only does shear stress build up, but also the anisotropy of the contact network develops, as it relates to the creation and destruction of contacts and force chains (see Alonso-Marroquín et al., 2005; La Ragione and Magnanimo, 2012; Luding and Perdahcioğlu, 2011; Radjai et al., 1999; Walsh and Tordesillas, 2004; Yimsiri and Soga, 2010, among others). In this sense, anisotropy represents a history parameter for the granular assembly. For anisotropic samples, scalar quantities are not sufficient to fully represent the internal contact structure, but an extra tensorial quantity has to be introduced, namely the fabric tensor (Goddard, 1998; Oda, 1972). To gain more insight into the microstructure of granular materials, numerical studies and simulations on various deformation experiments can be performed, see Thornton, 2010; Thornton and Zhang, 2006, 2010; Yimsiri and Soga, 2010, and references therein.
In an attempt to classify different deformation modes, Luding and Perdahcioğlu, 2011, listed four different deformation modes: (0) isotropic (direction-independent), (1) uniaxial, (2) deviatoric (volume-conserving) and (3) bi-/triaxial deformations. The first two are purely strain-controlled, while the last (3) is mixed strain- and stress-controlled either with constant side stress (Luding and Perdahcioğlu, 2011) or constant pressure (Magnanimo and Luding, 2011). The isotropic and deviatoric modes 0 and 2 are pure modes which both take especially simple forms. The uniaxial deformation test derives from the superposition of an isotropic and a deviatoric test, and represents the simplest element test experiment (oedometer, uniaxial test or λ–meter as reported in Kwade et al., 1994) that activates both isotropic and shear deformation. Even though biaxial tests are more complex to realize and involve mixed stress-and strain-control instead of completely prescribed strain (Morgeneyer and Schwedes, 2003; Zetzener and Schwedes, 1998), they are assumed to better represent the deformation under realistic boundary conditions – namely the material can expand and form shear bands.
In this study, various deformation paths for assemblies of polydisperse packings of linearly elastic, nonfrictional cohesionless particles are modeled using the DEM simulation approach (Cundall and Strack, 1979). One goal is to study the evolution of pressure (isotropic stress) and deviatoric stress as functions of isotropic and deviatoric strain. Internal quantities such as the coordination number, the fraction of rattlers, and the fabric tensor are reported for improved microscopic understanding of the deformations. Furthermore, the extensive set of DEM simulations is used to calibrate the anisotropic constitutive model, as proposed by Luding and Perdahcioğlu, 2011; Magnanimo and Luding, 2011. After calibration through isotropic (Göncü et al., 2010) and volume-conserving pure shear simulations, the derived relations between the bulk material parameters and volume fraction are used to predict uniaxial deformations, with the goal of improving the understanding of the macroscopic behavior of bulk particle systems and of guiding further developments of new theoretical models that properly and predictively describe it.
The focus on the seemingly unrealistic materials allows us to exclude effects that are due to friction, contact non-linearity and/or non-sphericity, with the goal of unraveling the interplay of microstructure (fabric), stress and strain. This is the basis for the present research – beyond the scope of this paper – that aims at the quantitative modeling of these phenomena and effects for realistic frictional, cohesive powders. The deformation modes used in this study are especially suited for the biaxial box experimental element test set-up and provide the fundamental basis for the prediction of many other experimental devices. The qualitative phenomenology presented here is expected to be valid, even clearer and magnified, in the presence of friction, non-spherical particles, and for strong attractive forces.
This paper is organized as follows: The simulation method and parameters used are presented in section 2 while the preparation and test procedures are introduced in section 3. Generalized averaging definitions for scalar and tensorial quantities are given in section 4 and the evolution of microscopic quantities is discussed in section 5. In section 6, the macroscopic quantities (isotropic and deviatoric) and their evolution are studied as functions of volume fraction and deviatoric (pure shear) strain for the different deformation modes. These results are then used to obtain/calibrate the macroscopic model parameters. Section 7 is devoted to theory, where we relate the evolution of the stress and structural anisotropy to strain, as proposed by Luding and Perdahcioğlu, 2011; Magnanimo and Luding, 2011, and confirm the predictive quality of the calibrated model.
The Discrete Element Method (DEM) has been used extensively to perform simulations in bi- and triaxial geometries (Durán et al., 2010; Kruyt et al., 2010; Luding, 2005; Sun and Sundaresan, 2011; Yimsiri and Soga, 2010) involving advanced contact models for fine powders (Luding, 2008c) or more general deformation modes, (see Alonso-Marroquín et al., 2005; Thornton, 2010; Thornton and Zhang, 2010 and references therein).
However, since we restrict ourselves to the simplest deformation modes and the simplest contact model, and since DEM is other wise a standard method, only the contact model parameters and a few relevant timescales are briefly discussed – as well as the basic system parameters.
2.1 Force modelFor the sake of simplicity, the linear visco-elastic contact model for the normal component of the force has been used in this work and friction is set to zero (and hence neither tangential forces nor rotations are present). The simplest normal contact force model, which takes into account excluded volume and dissipation, involves a linear repulsive and a linear dissipative force, given as
| (1) |
The results presented in this study can be seen as a “lower-bound” reference case for more realistic material models, see e.g., Luding, 2008c, and references therein. The interesting, complex behavior and nonlinearities of our most simple granular material can not be due to the contact model, but is related to the collective bulk behavior of many particles, as will be shown below.
2.2 Simulation parameters and timescalesTypical simulation parameters for the N = 9261 (=213) particles with average radius ⟨r⟩ = 1 [mm] are density ρ = 2000 [kg/m3], elastic stiffness k = 108 [kg/s2], and background dissipation γb = 0.1 [kg/s]. The polydispersity of the system is quantified by the width w = rmax/rmin of a uniform distribution with a step function as defined in Göncü et al., 2010, where rmax 1.5 [mm] and rmin 0.5 [mm] are the radius of the biggest and smallest particles, respectively.
Note that the units are artificial; Luding, 2008c provides an explanation of how they can be consistently rescaled to quantitatively match the values obtained from experiments (thanks to dimensional analysis and the simplicity of the contact model used).
A typical response time is the collision duration tc. For for a pair of particles with masses mi and mj, it is
Our numerical “experiments” are performed in a three-dimensional triaxial box with periodic boundaries on all sides. One advantage of this configuration is the possibility of realizing different deformation modes with a single experimental set-up and a direct control of stress and/or strain (Durán et al., 2010; Luding and Perdahcioğlu, 2011). The systems are ideally homogeneous, which is assumed but not tested in this study.
The periodic walls can be strain-controlled to follow a co-sinusoidal law such that, for example, the position of the top wall as a function of time t is
| (2) |
Different strain-control modes are possible such as homogeneous strain-rate control for each time step (applied to all particles and the periodic walls, i.e. the system boundaries) or swelling instead of isotropic compression, as well as pressure control of the (virtual) walls. However, this is not discussed since it had no effect for the simple frictionless contact model used here and for the quasi-static deformations applied. For more realistic contact models (dating back to, e.g. Hertz, 1881; Mindlin and Deresiewicz, 1953), for friction and adhesion (Luding, 2008c and references therein) and for large strain rates, the modes of strain or stress control have to be revisited and carefully studied.
In this section, we describe first the sample preparation procedure and then the method for implementing the isotropic, uniaxial and deviatoric element test simulations. For convenience, the tensorial definitions of the different modes will be based on their respective strain-rate tensors. However, for presenting the numerical results, we will use the strain tensor as defined in section 4.2.1.
3.1 Initial isotropic preparationSince careful, well-defined sample preparation is essential in any physical experiment to obtain reproducible results (Ezaoui and Di Benedetto, 2009), the preparation consists of three parts: (i) randomization, (ii) isotropic compression, and (iii) relaxation. All are equally important to achieve the initial configurations for the following analysis. (i) The initial configuration is such that spherical particles are randomly generated in a 3D box with a low volume fraction and rather large random velocities such that they have sufficient space and time to exchange places and to randomize themselves. (ii) This granular gas is isotropically compressed in order to approach a direction-independent configuration to a target volume fraction v0 = 0.640, slightly below the jamming volume fraction vc ≈ 0.665, i.e. the transition point from fluid-like behavior to solid-like behavior (van Hecke, 2009; Majmudar et al., 2007; Makse et al., 2000; O’Hern et al., 2002). (iii) This is followed by a relaxation period at a constant volume fraction to allow the particles to fully dissipate their energy and to achieve a static configuration.
Isotropic compression/decompression (negative/ positive strain rate in our convention) can now be used to further prepare the system, with subsequent relaxation, so that we have a series of different initial isotropic configurations at volume fractions vc, achieved during loading and unloading, as displayed in Fig. 1. Furthermore, the isotropic compression can be considered as an element test itself (Göncü et al., 2010). It is realized by a simultaneous inward movement of all the periodic boundaries of the system, with strain-rate tensor
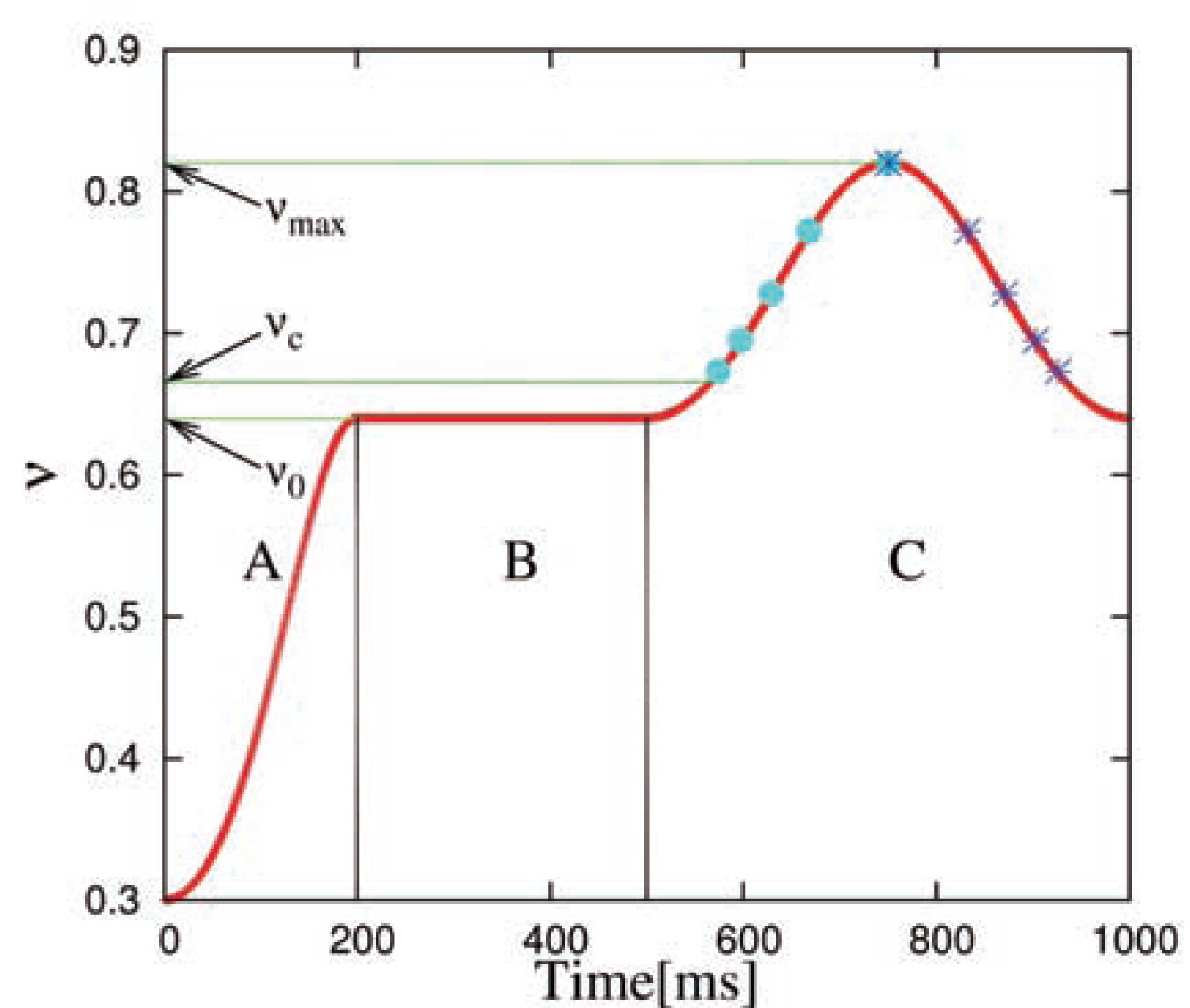
Evolution of volume fraction as a function of time. Region A represents the initial isotropic compression up to the initial volume fraction v0. B represents relaxation of the system and C represents the subsequent isotropic compression up to vmax = 0.820 and then decompression. Cyan dots represent some of the initial configurations, at different vi, during the loading cycle, and blue stars during the unloading cycle, both of which can be chosen for further study.
A general schematic representation of the procedure for implementing the isotropic and other deformation tests is shown in Fig. 2.

Generic schematic representation of the procedure for implementing isotropic, uniaxial and deviatoric deformation element tests. The isotropic preparation stage is represented by the dashed box. The corresponding plots (not to scale) for the deviatoric strain against volumetric strain are shown below the respective modes. The solid square boxes in the flowchart represent the actual tests. The blue circles indicate the start of the preparation; the red triangles represent its end, i.e. the start of the test, while the green diamonds show the end of the respective test.
The compressed and relaxed configurations can now be used for other non-volume-conserving and/or stress-controlled modes (e.g. biaxial, triaxial and isobaric). One only has to use them as initial configurations and then decide which deformation mode to use, as shown in the figure under “other deformations”. The corresponding schematic plots of deviatoric strain ϵdev as a function of volumetric strain ϵv are shown below the respective modes.
3.2 UniaxialUniaxial compression is one of the element tests that can be initiated at the end of the “preparation”, after sufficient relaxation indicated by the drop in potential energy to almost zero. The uniaxial compression mode in the triaxial box is achieved by a prescribed strain path in the z-direction, see Eq. (2), while the other boundaries x and y are non-mobile. During loading (compression), the volume fraction is increased as for isotropic compression from v0 = 0.640 to a maximum volume fraction of vmax = 0.820 (as shown in region C of Fig. 1), and reverses back to the original volume fraction v0 during unloading. Uniaxial compression is defined by the strain-rate tensor
The preparation procedure as described in section 3.1 provides different initial configurations with volume fractions, vi. For the deviatoric deformation element test, unless stated otherwise, the configurations are from the unloading part (represented by blue stars in Fig. 1), to test the dependence of quantities of interest on the volume fraction during volume-conserving deviatoric (pure shear) deformations. The unloading branch is more reliable since it is much less sensitive to the protocol and rate of deformation during preparation (Göncü et al., 2010, Kumar et al., 2012b). Two different ways of deforming the system deviatorically with conserved volume are used here. The deviatoric mode D2 has the strain-rate tensor
Note that the D3 mode is uniquely similar in “shape” to the uniaxial mode1, see Table 1, since in both cases two walls are controlled similarly. Mode D2 is different in this respect and thus resembles more an independent mode (pure shear), so that unless differently stated, we plot by default the D2 results rather than the D3 ones (see section 2). The mode D2 with shape factor (as defined in Table 1) ζ = 0 is on the one hand a plane strain deformation, and on the other hand allows for simulation of the biaxial experiment (with two walls static while four walls are moving, see Morgeneyer and Schwedes, 2003; Zetzener and Schwedes, 1998).
| Mode | Strain-rate tensor (main diagonal, sorted) | Deviatoric strain rate (magnitude) |
|
Lode angle
|
| ISO (isotropic compression) |
|
|
n.a. | n.a. |
| UNI (uniaxial compression) |
|
|
1 | 60° |
| D2 (pure shear – plane strain) |
|
|
0 | 30° |
| D3 (axisymmetric compression) |
|
|
1 | 60° |
In this section, we present the general definitions of averaged microscopic and macroscopic quantities. The latter are quantities that are readily accessible from laboratory experiments, whereas the former are often impossible to measure in experiments but are easily available from discrete element simulations.
4.1 Averaged microscopic quantitiesHere, we define microscopic parameters including the coordination number, the fraction of rattlers, and the ratio of the kinetic and potential energy.
4.1.1 Coordination number and rattlersIn order to link the macroscopic load carried by the sample with the microscopic contact network, all particles that do not contribute to the force network – particles with exactly zero contacts – are excluded. In addition to these “rattlers” with zero contacts, there may be a few particles with a finite number of contacts for a short time which also do not contribute to the mechanical stability of the packing. These particles are called dynamic rattlers (Göncü et al., 2010), since their contacts are transient: The repulsive contact forces will push them away from the mechanically stable backbone. Frictionless particles with less than 4 contacts are thus rattlers, since they are mechanically unstable and hence do not contribute to the contact network. In this work, since tangential forces are neglected, rattlers can be identified by just counting their number of contacts. This leads to the following abbreviations and definitions for the coordination number (i.e. the average number of contacts per particle) and fraction of rattlers, which must be reconsidered for systems with tangential forces or torques:
N:Total number of particles
N4:= Nc≥ = 4:Number of particles with at least 4 contacts
M:Total number of contacts
M4:= Mc≥ = 4:Number of contacts of particles with at least 4 contacts
(Number) fraction of rattlers
Coordination number (simple definition)
Coordination number (modified definition)
Corrected coordination number
Volume fraction of the particles, with V p as particle volume.
Some simulation results for the coordination numbers and the fraction of rattlers will be presented below in subsection 5.1.
4.1.2 Energy ratio and quasi-static criterionAbove the jamming volume fraction vc, in mechanically stable static situations, there exist permanent contacts between particles; hence the potential energy (which is also an indicator of the overlap between particles) is considerably larger than the kinetic energy (which has to be seen as a perturbation).
The ratio of kinetic energy and potential energy is shown in Fig. 3 for isotropic compression from v0 = 0.640 to vmax = 0.820 and back. The first simulation, represented by the solid red line, was run for a simulation time T = 5000 [μs] and the second (much slower) simulation, represented by the green dashed line was run for T = 50000 [μs]. For these simulations, the maximum strain rates are
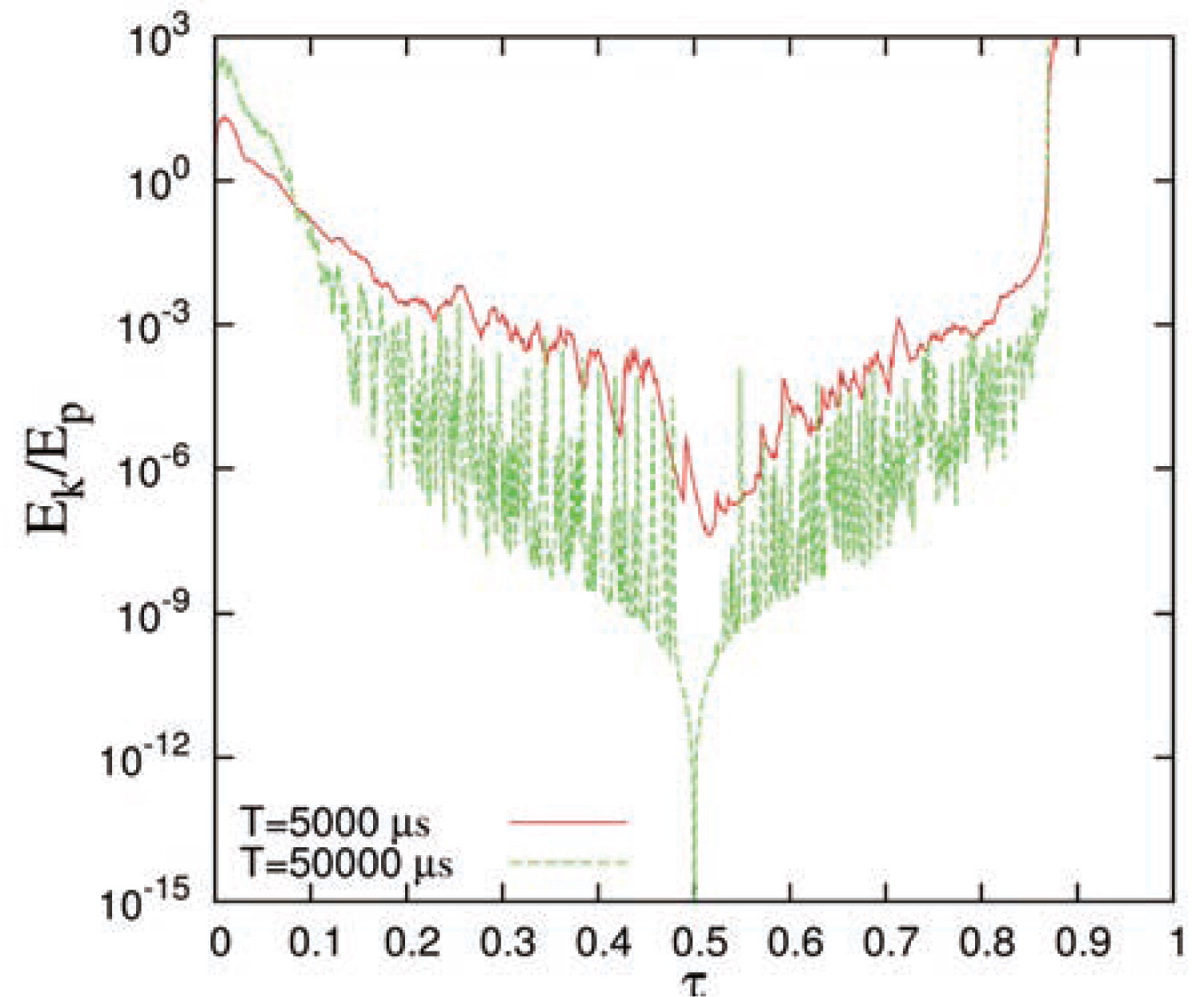
Comparison of the ratio of kinetic and potential energy in scaled time (τ = t/T) for two simulations, with different period of one compression-decompression cycle T, as given in the inset.
Now the focus is on defining averaged macroscopic tensorial quantities – including strain, stress and fabric (structure) tensors – that reveal interesting bulk features and provide information about the state of the packing due to its deformation.
4.2.1 StrainFor any deformation, the isotropic part of the infinitesimal strain tensor ϵv is defined as:
| (3) |
Several definitions are available in literature (Imole et al., 2011; Thornton and Zhang, 2006, 2010; Zhao and Evans, 2011) to define the deviatoric magnitude of the strain. For the sake of simplicity, we use the following definition of the deviatoric strain to account for all active and inactive directions in a triaxial experiment, regardless of the deformation mode,
| (4) |
From the simulations, one can determine the stress tensor (compressive stress is positive as convention) components:
| (5) |
The average isotropic stress (i.e. the hydrostatic pressure) is defined as:
| (6) |
| (7) |
| (8) |
It is noteworthy to add that the definitions of the deviatoric stress and strain tensors are proportional to the second invariants of these tensors, e.g. for stress:
Besides the stress of a static packing of powders and grains, the next most important quantity of interest is the fabric/structure tensor. For disordered media, the concept of the fabric tensor naturally occurs when the system consists of an elastic network or a packing of discrete particles. The expression for the components of the fabric tensor is:
| (9) |
| (10) |
Three macroscopic rank-two tensors were defined and will be related to microscopic quantities and each other in the following. The orientations of all the tensor eigenvectors show a tiny non-co-linearity of stress, strain and fabric, which we neglect in the next sections, since we attribute it to natural statistical fluctuations and consider a unique fixed eigensystem coincident with the Cartesian reference system for all our deformation modes. The shape factor, as defined for strain, can also be analyzed for stress and fabric, but this will be shown elsewhere.
In this section, we discuss the evolution of the microscopic quantities studied – including coordination number and fraction of rattlers – as a function of volume fraction and deviatoric strain, respectively, and compare these results for the different deformation modes.
5.1 Coordination number and rattlersIt has been observed by Göncü et al., 2010, that under isotropic deformation, the corrected coordination number C* follows the power law
| (11) |
In Fig. 4, the evolution of the simple, corrected and modified coordination numbers is compared as a function of the volume fraction during uniaxial deformation (during one loading and unloading cycle). The contribution to the coordination number originating from particles with C = 1, 2 or 3 is small – as compared to those with C = 0 – since Cr and Cm are very similar, but always smaller than C* due to the fraction of rattlers, as discussed below. The number of contacts per particle grows with increasing compression to a value of C* = 9.5 at maximum compression. During decompression, the contacts begin to open and the coordination number decreases and approaches the theoretical value C0 = 6 at the critical jamming volume fraction4 after uniaxial decompression
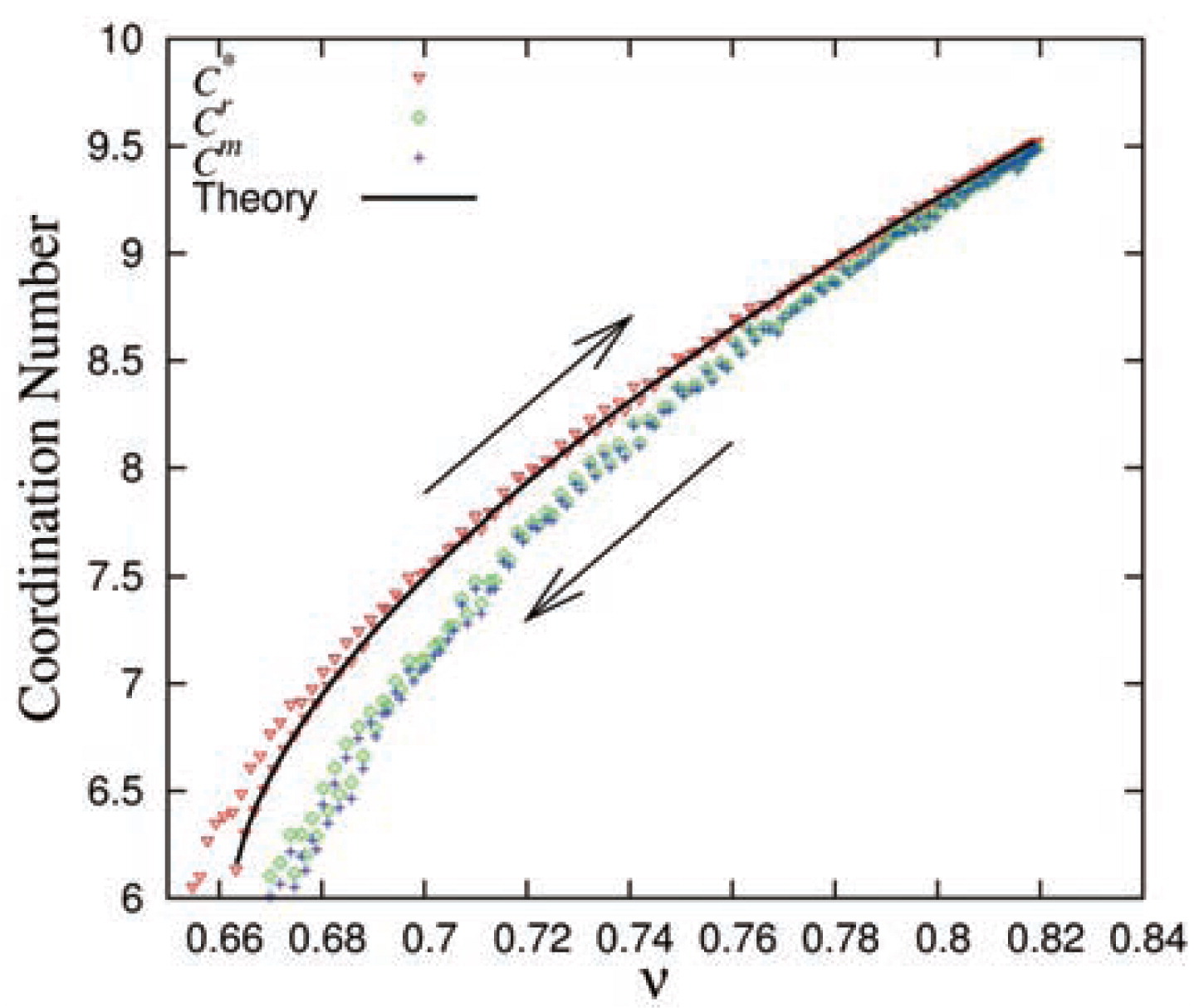
Comparison between coordination numbers using the simple (‘+’, blue), modified (‘⟐’, green) and corrected (‘▿’, red) definitions. Data are from a uniaxial compression-decompression simulation starting from v0 = 0.64 < vc ≈ 0.6625. The solid black line represents Eq. (11) with parameters given in the text very similar to those measured in Göncü et al., 2010, see Table 2. The compression and decompression branches are indicated by arrows pointing right and left, respectively.
In Fig. 5, we plot the corrected coordination number for deformation mode D2 as a function of the deviatoric strain for five different volume fractions. Two sets of data are presented for each volume fraction starting from different initial configurations, either from the loading or the unloading branch of the isotropic preparation simulation (cyan dots and blue stars in Fig. 1). Given initial states with volume fractions above the jamming volume fraction, and due to the volume-conserving D2 mode, the value of the coordination number remains practically constant. It is only for the lowest volume fractions close to jamming, that a slight increase (decrease) in C* can be seen for the initial states chosen from the unloading (loading) branch of the preparation step.
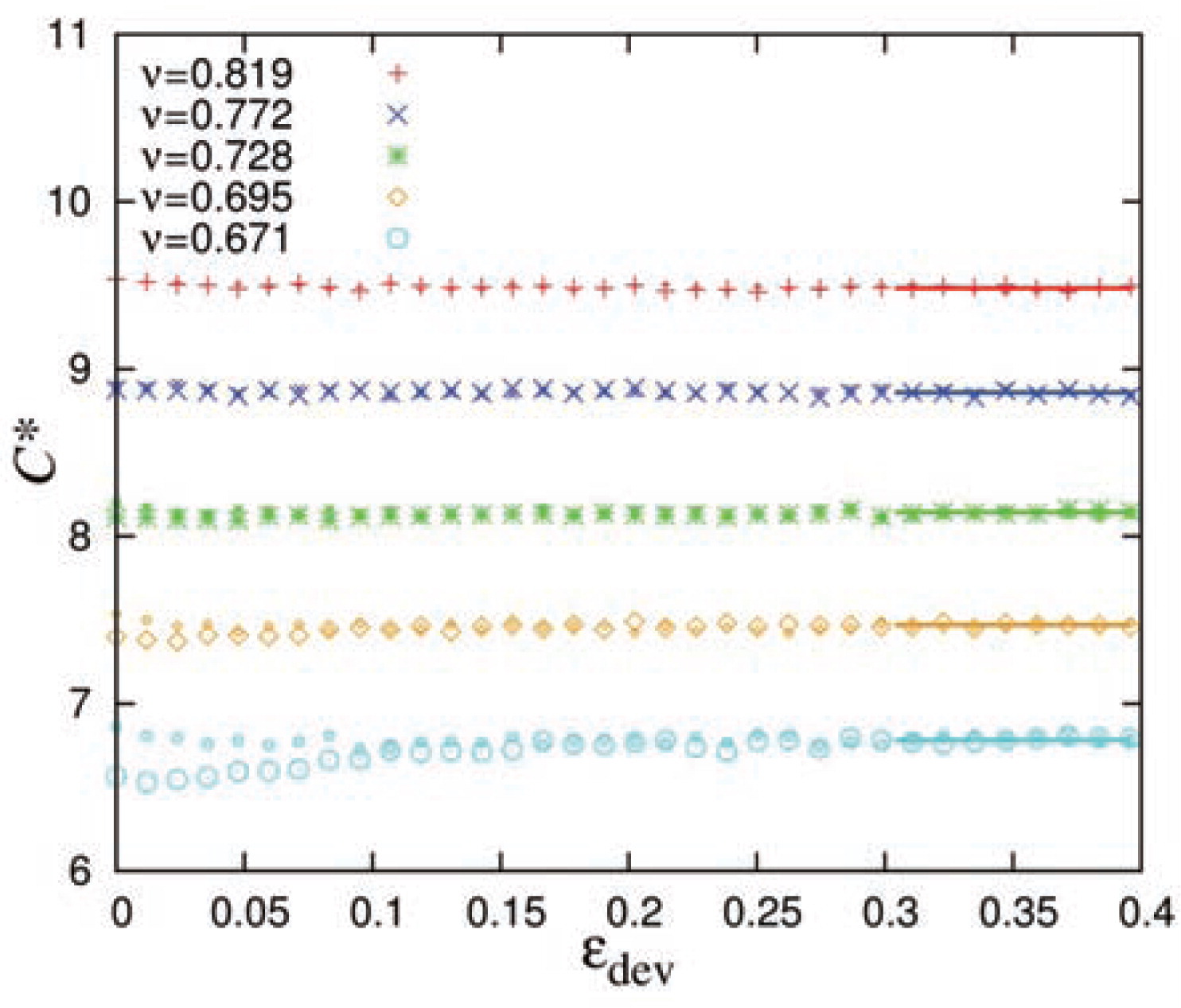
Evolution of coordination numbers with deviatoric strain for the D2 mode. Smaller symbols represent data with initial configuration from the loading branch of an isotropic simulation, while the larger symbols start from an initial configuration with the same volume fraction, but from the isotropic unloading branch. The horizontal line at the large strain of the dataset indicates an average after saturation at steady state.
However, both reach similar steady-state values after large strain, as indicated by the solid lines. Hence, for further analysis and unless otherwise stated, we will only present the steady-state values of micro- and macro-quantities from deviatoric modes D2 and D3.
The rearrangement of the particles during shear thus does not lead to the creation (or destruction) of many contacts – on average. There is no evidence of the change of average contacts after 10 – 15 percent of strain. However, close to jamming, a clear dependence of C* on the initial state exists, which vanishes in steady state when one gets saturated values in micro- and macro-quantities after large enough strain. For the same volume fraction, we evidence a range of
In Fig. 6, the corrected coordination number is shown as a function of volume fraction for the purely isotropic and for the uniaxial unloading data as well as for the large strain deviatoric deformation data-sets. Different symbols show the values of C* for the different deformation modes for various volume fractions. Interestingly, the power law for the coordination number derived from isotropic data describes well also the uniaxial and deviatoric datasets, with coefficients given in Table 2. This suggests that (for the cases considered, when particles are frictionless) the coordination number is almost independent of the deviatoric strain in steady state, and the limit values can be approximated by Eq. (11) as proposed for simple isotropic deformation. The distinction between the modes at the small (isotropic) strain region is shown zoomed in the inset of Fig. 6. The mixed mode (uniaxial) is bordered on both sides by the pure modes, namely isotropic and deviatoric (D2 and D3 cannot be distinguished), indicating that the two pure modes are limit states or extrema for C*. Alternatively, the range in C* values can be seen as caused by a range in vc, with
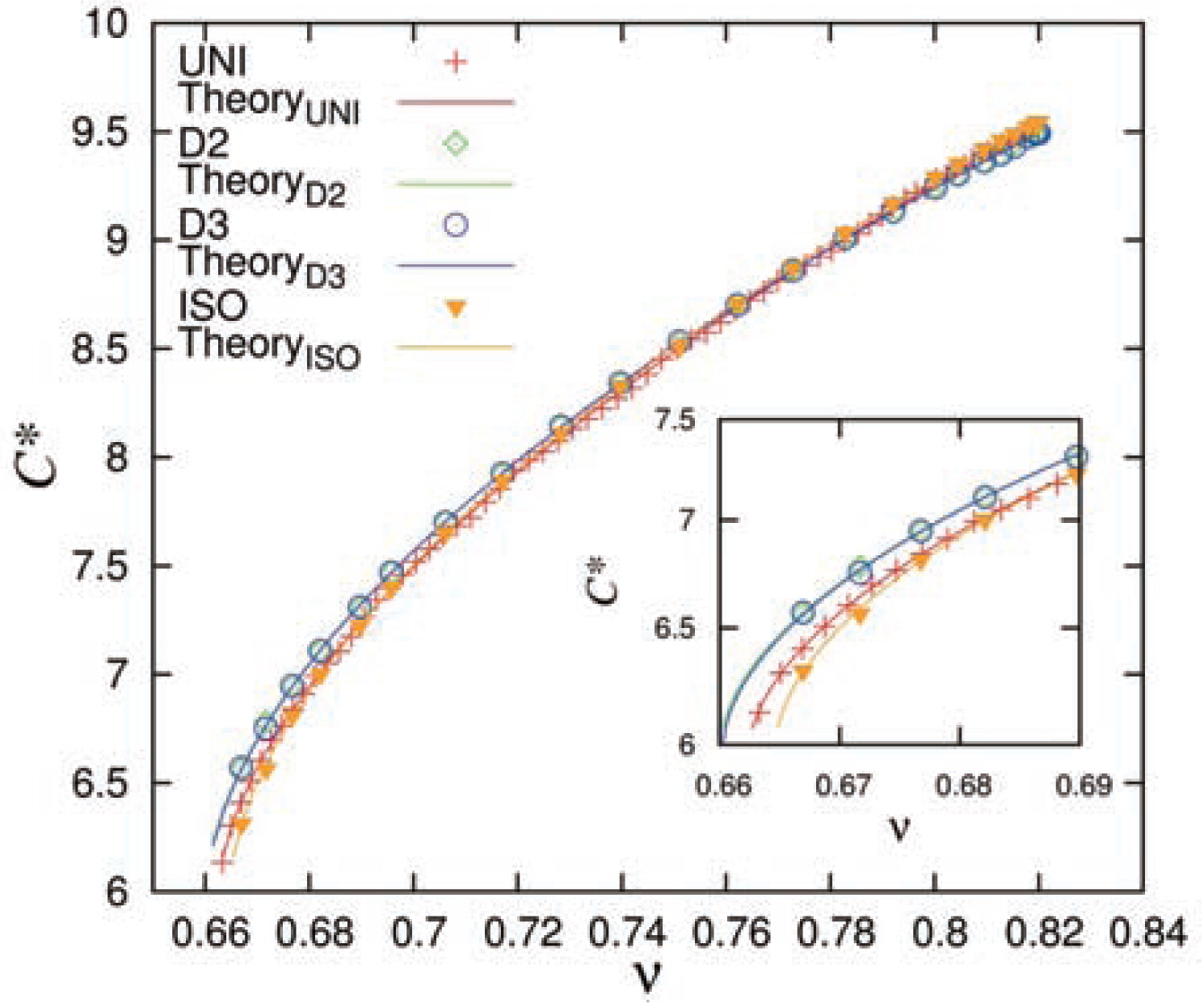
Evolution of the corrected coordination number as a function of volume fraction during unloading for all modes. The symbols represent the respective simulation data while the solid lines represent the analytical equation according to Eq. (11) with the respective values of C0, C1, α and vc shown in Table 2. The inset shows the corrected coordination number at low volume fractions close to jamming.
| C* | C1 | α | vc |
| ISOG | 8.0 ± 0.5 | 0.58 ± 0.05 | 0.66 ± 0.01 |
| ISO | 8.2720 | 0.5814 | 0.6646 |
| UNI | 8.3700 | 0.5998 | 0.6625 |
| D2 | 7.9219 | 0.5769 | 0.6601 |
| D3 | 7.9289 | 0.5764 | 0.6603 |
| ϕr | ϕc | ϕv | |
| ISOG | 0.13 ± 0.03 | 15 ± 2 | |
| ISO | 0.1216 | 15.8950 | |
| UNI | 0.1507 | 15.6835 | |
| D2 | 0.1363 | 15.0010 | |
| D3 | 0.1327 | 14.6813 |
| p* | p0 | γp | vc |
| ISOG | 0.04180 | 0.11000 | 0.6660 |
| ISO | 0.04172 | 0.06228 | 0.6649 |
| UNI | 0.04006 | 0.03270 | 0.6619 |
| D2 | 0.03886 | 0.03219 | 0.6581 |
| D3 | 0.03899 | 0.02819 | 0.6583 |
In other words, deviatoric deformations reduce the jamming volume fraction of the packing, i.e. can disturb and dilate a dense (over-compressed) packing so that it becomes less efficiently packed. This is opposite to isotropic over-compression, where after unloading, the jamming volume fraction is higher, i.e. the system is more efficiently packed/structured. This behavior is qualitatively expected for frictional particles, however, this is to our knowledge the first time that this small but systematic range in the jamming volume fractions is reported for frictionless packings – where the most relevant and only mechanism is structural reorganization, as will be discussed further in section 6.1.1.
As a related interesting microscopic quantity, we recall the analytical expression for the fraction of rattlers proposed by Göncü et al., 2010:
| (12) |

Evolution of the fraction of rattlers as a function of volume fraction during unloading for all modes. The symbols represent the respective simulation data. The solid lines are the analytical fits of Eq. (12) for each mode with the values of fit parameters ϕc and ϕv for each mode shown in Table 2. The arrow indicates the unloading direction.
To better understand the peculiar behavior of the jamming volume fraction under the different modes of deformation, some macroscopic quantities are studied next.
In the following, we discuss the evolution of the macroscopic tensors, stress and fabric, as defined in section 4.2. For clarity, we split them into isotropic and deviatoric parts in subsections 6.1 and 6.2, respectively.
6.1 Evolution of macro-quantities: isotropic 6.1.1 Isotropic pressureIn this section, the relation between pressure and volume fraction is studied. First, we consider the contact overlap/deformation δc, since the force is directly related to it and stress is proportional to the force. The infinitesimal change d⟨Δ⟩c = 3Zϵv of the normalized average overlap Δc = δc/⟨r⟩, can be related to the volumetric strain under the simplifying assumption of uniform, homogeneous deformation in the packing. As defined in subsection 4.2.1, ϵv = ϵii/3 is the average of the diagonal elements of the infinitesimal strain tensor, and Z ≈ 0.425 is a proportionality constant that depends on the size distribution and can be readily obtained from the average overlap and volume fraction (data not shown), see Eq. (13). The integral of 3ϵv denoted by εv is the true or logarithmic volume change of the system relative to the reference volume Vref. This is chosen without loss of generality at the critical jamming volume fraction vref = vc, so that the normalized average overlap is (Göncü et al., 2010):
| (13) |
As in Eq. (7), see Refs. Göncü et al., 2010; Shaebani et al., 2012 for details, the non-dimensional pressure is:
| (14) |
| (15) |
Note that the critical volume fraction vc = 0.6625, as obtained from extrapolation of C* to the isostatic coordination number C0 = 6, is very close to that obtained from Eq. (14). When fitting all modes with pressure, one confirms again that
In Fig. 8, we plot the total (non-dimensional) pressure p as a function of the deviatoric strain for different volume fractions in the deformation mode D2. Above the jamming volume fraction, the value of the pressure stays practically constant with increasing shear strain. A slight increase in p can be seen for the lowest volume fractions when the initial states are chosen from the unloading branch of isotropic modes, whereas a slight decrease in p is observed for initial states chosen from the loading branch. Independently of the initial configuration, the pressure reaches a unique steady state at large strain, similarly to what is observed for the coordination number in Fig. 6.
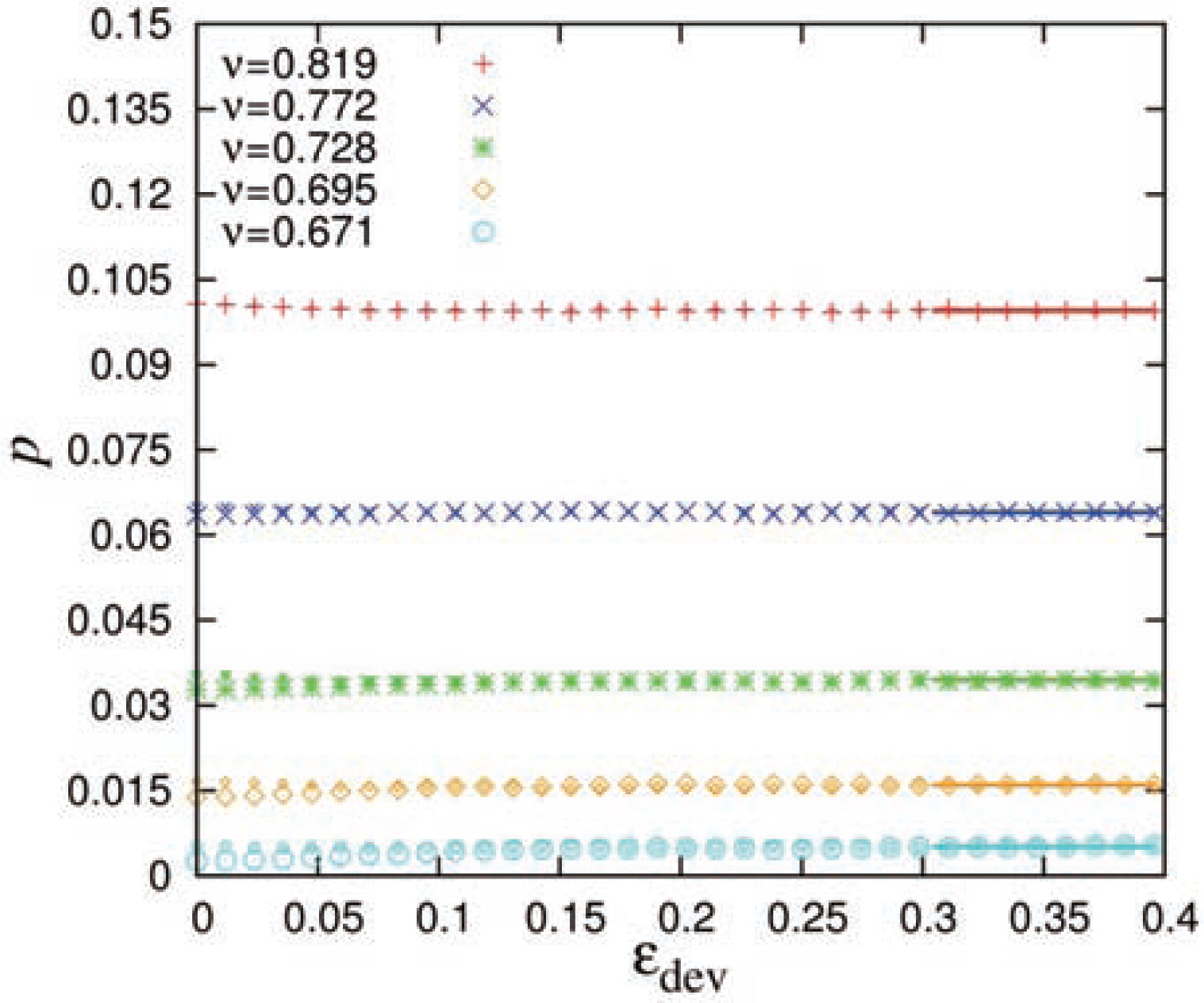
Evolution of (non-dimensional) pressure, Eq. (7), with deviatoric strain for the D2 deformation mode, at different initial volume fractions vi. Small and large symbols represent simulations starting with initial isotropic configurations from the loading and unloading branch, respectively. The horizontal line at the large strain of the dataset indicates an average value of the pressure after saturation at steady state.
In Fig. 9, the total pressure is plotted against volume fraction for isotropic, uniaxial and deviatoric (D2 and D3) modes, with data obtained from the unloading branch in the first two cases and after large deviatoric strain for the deviatoric modes (see Fig. 8). For these three modes, at large v, the simulation data collapse on a unique curve with non-linear behavior. Due to the linear contact model, this feature can be directly related to the contact number density, i.e. the isotropic fabric, which quantifies the isotropic, direction-independent changes of structure due to rearrangements and closing/opening of contacts. When approaching the jamming transition, the pressure values diverge slightly (inset of Fig. 9) due to the difference in the critical volume fractions

Total (non-dimensional) pressure, Eq. (14), plotted as a function of volume fraction for the uni-axial and isotropic datasets during unloading, and for the D2/D3 deviatoric modes after large strain. The solid lines are the analytical fits of Eq. (14) for each mode, with parameters p0, γp and vc shown in Table 2.
In Fig. 10, we plot the scaled pressure defined in Eq. (15) against the volumetric strain from the same data as in Fig. 9. The three datasets almost collapse for small strain. For increasing volume fractions (larger −εv), the scaled pressure in the isotropic mode is considerably larger than the uniaxial and deviatoric modes, where again the uniaxial data fall in between isotropic and deviatoric values. This resembles the behavior of C* and is consistent with the fact that the uniaxial mode is a superposition of the purely isotropic and deviatoric deformation modes.
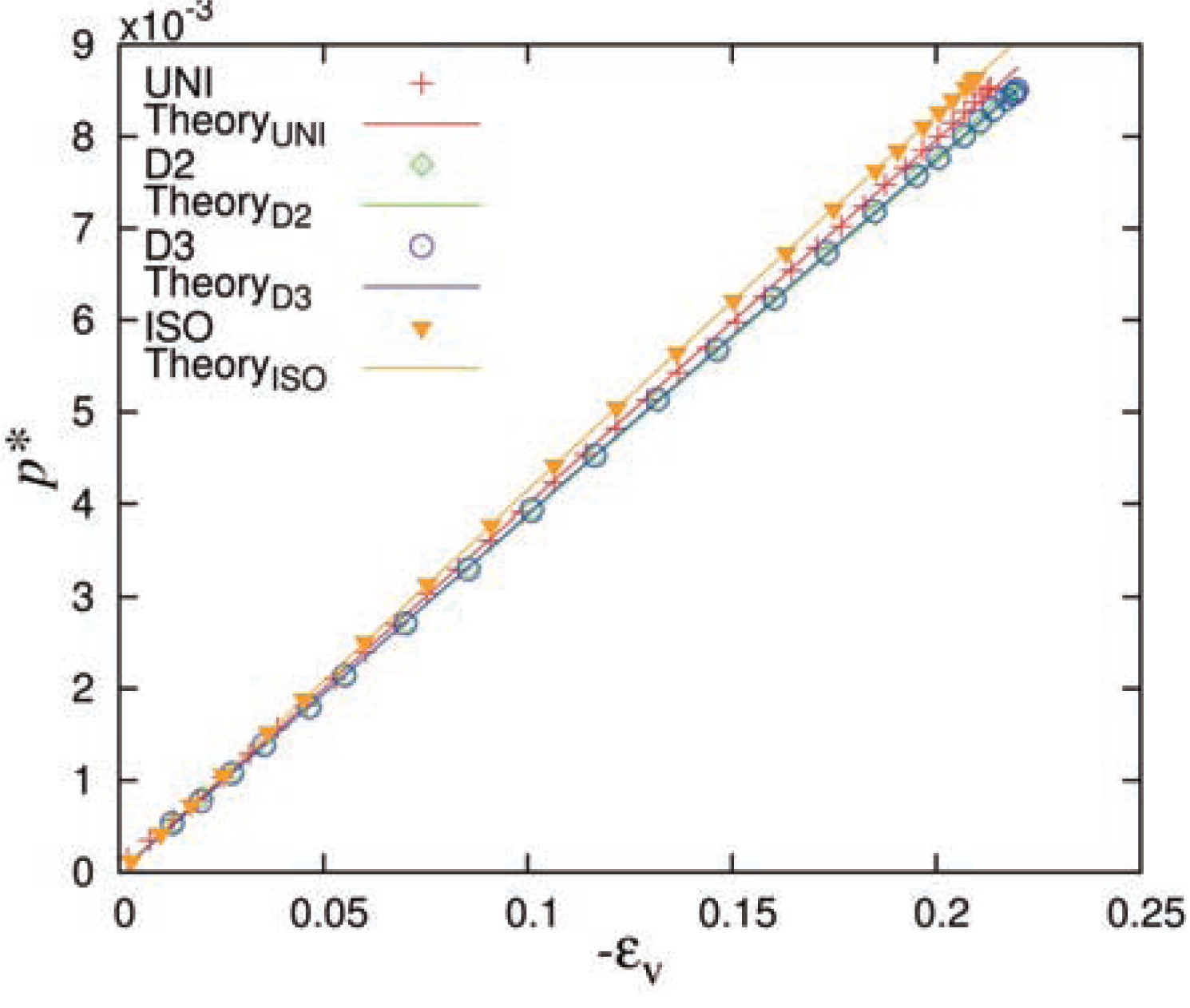
The dependence of pressure on isotropic strain can be interpreted in relation to the sample history. The deviatoric modes (D2 or D3) lead to dilatancy and thus to higher steady-state pressure, with low
The apparent collapse of all scaled p* data at small strain, with similar pre-factors p0 ≈ 0.040 is interesting since, irrespective of the applied deformation mode – purely isotropic, uniaxial, and D2 or D3 deviatoric, it boils down to a linear relation between p* and −εv with a small quadratic correction – different from the non-linear power laws proposed in previous studies, e.g. in Majmudar et al., 2007. The non-linearity due to 1 − v/vc is hidden in vC, which is actually proportional to the isotropic fabric Fv.
6.1.2 Isotropic fabricThe random isotropic orientation of the contact directions in space was studied in detail in Refs. Göncü et al., 2010 and Shaebani et al., 2012, and is referred to as the contact number density with tr(F) = g3vC, where g3 is of order unity and depends only on the size distribution (for our case with w = 3, one has g3 ≈ 1.22). Note that vC directly connects to the dimensionless pressure which, remarkably, hides the corrected coordination number and the fraction of rattlers in the relation C = (1 − ϕr)C*, which fully determines tr(F).
6.2 Evolution of macro-quantities: deviatoricIn the following, we will show the evolution of the deviatoric stress ratio (which can be seen as a measure of stress anisotropy) and the structural anisotropy, both as a function of the deviatoric strain. In particular, we present the raw data from deviatoric and uniaxial simulations and their phenomenology. The D2 volume-conserving simulations are used to calibrate the constitutive model, as presented in Refs. Luding and Perdahcioğlu, 2011, Magnanimo and Luding, 2011 and described in section 7. We further use the fitting parameters inferred from deviatoric data to predict the evolution of stress and fabric during uni-axial deformation.
6.2.1 Deviatoric stressThe behavior of the deviatoric stress ratio, sdev = σdev/P during deformation mode D2, is shown in Fig. 11 as a function of the deviatoric strain for various different volume fractions. The stress ratio initially grows with applied strain until an asymptote (the maximum stress anisotropy) is reached where it remains fairly constant. The asymptote
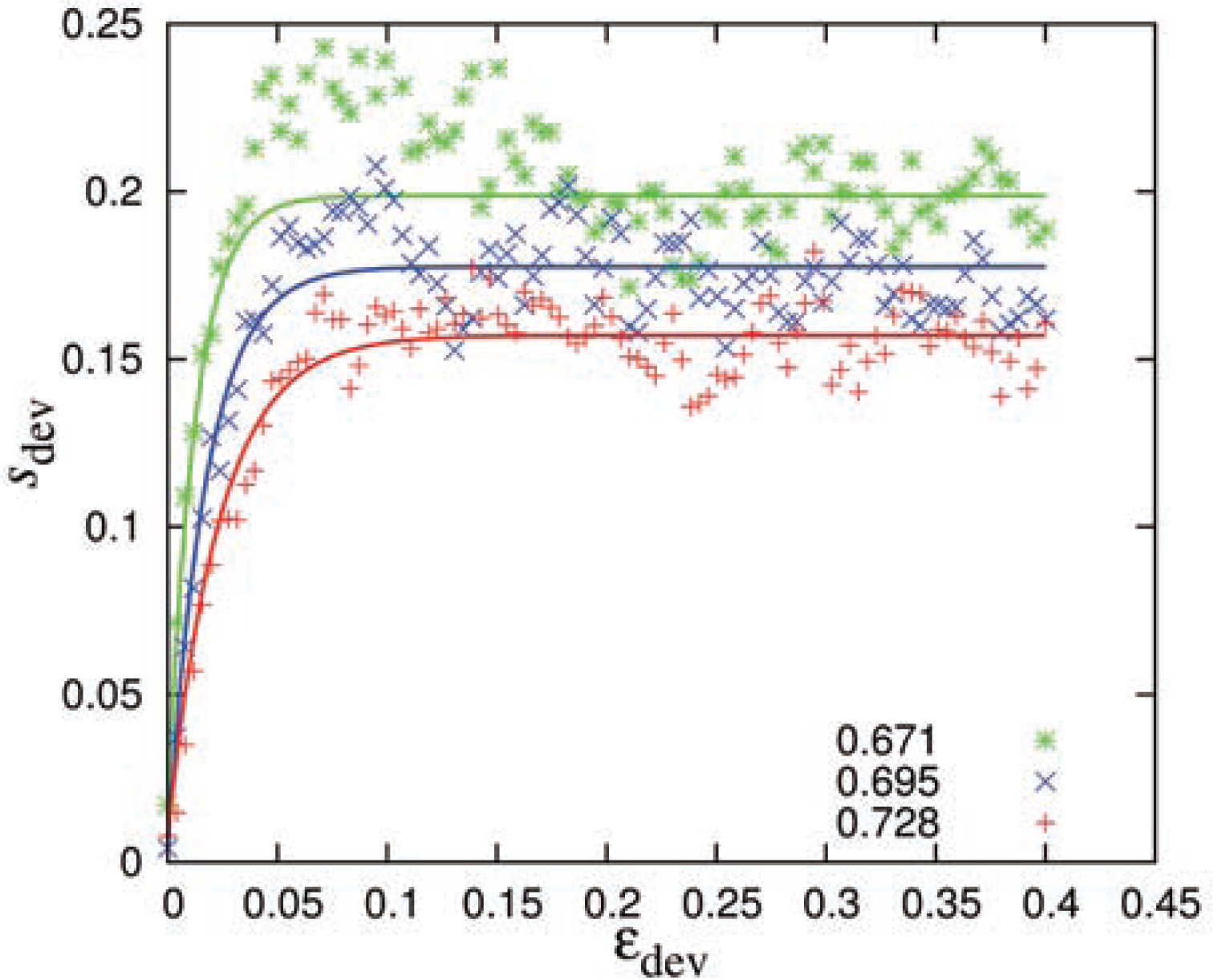
Deviatoric stress ratio (sdev =σdev/P) plotted against deviatoric strain from the D2 deformation mode for initial volume fractions vi during unloading, from which the simulations were performed, as given in the inset. The symbols (‘*’, ‘×’ and ‘+’) are the simulation data while the solid lines through them represent a fit to the data using Eq. (17).
We use the deviatoric simulations to fit the exponential relation proposed in Luding and Perdahcioğlu, 2011; Magnanimo and Luding, 2011, for the biaxial box and report the theoretical curves in the same Fig. 11. Both the initial growth rate coefficient and the asymptotic values are inferred from the volume-conserving deviatoric data, following the procedure described in Section 7. We point out here that the softening behavior after maximal sdev is ignored in the fitting procedure for the theoretical model, since we do not want this feature of the material to be plugged into the model as an additional element.
The stress-strain behavior in the case of uniaxial compression is shown in Fig. 12 star ting from initial volume fractions v =0.671, 0.695, 0.728, to a common maximum value vmax =0.820. Unlike the volume-conserving deviatoric simulations discussed previously, the evolution of the deviatoric stress ratio during uniaxial compression leads to large fluctuations that do not allow the clear observation of a possible softening/hardening regime. This difference is because the uniaxial deformation mode has a continuously increasing density and pressure in contrast, for example, to mode D3 where σzz is increasing and σyy ≈ σxx are decreasing such that the pressure remains (almost) constant. The solid lines superimposed on the data in the plot represent the predictions of the constitutive relation in Eq. (17), with the parameters obtained from the deviatoric modes D2 and D3, as explained in detail in section 7.

Deviatoric stress ratio plotted against deviatoric strain from the uniaxial compression mode data for different initial volume fractions vi during unloading, from which the uniaxial deformations were initiated, as given in the inset. The symbols ( ‘*’, ‘×’ and ‘+’ ) are the simulation data while the solid lines represent the prediction using Eq. (17).
Moreover, as the deviatoric strain increases during uniaxial deformation, the deviatoric stress ratio sdev also increases with values that depend on the initial volume fraction. For lower volume fractions we observe a higher stress ratio, similar to what is observed in Fig. 11. Interestingly, uniaxial deformations for different initial volume fractions lead to convergence (and almost collapse) after about 7.5 percent deviatoric strain. This feature of the uniaxial simulations is also well captured by the anisotropy model in section 7.3.
6.2.2 Deviatoric fabricThe evolution of the deviatoric fabric Fdev as a function of the deviatoric strain is shown in Fig. 13 for mode D2 simulations and three different volume fractions. It builds up from different random, small initial values and reaches different maximum saturation values
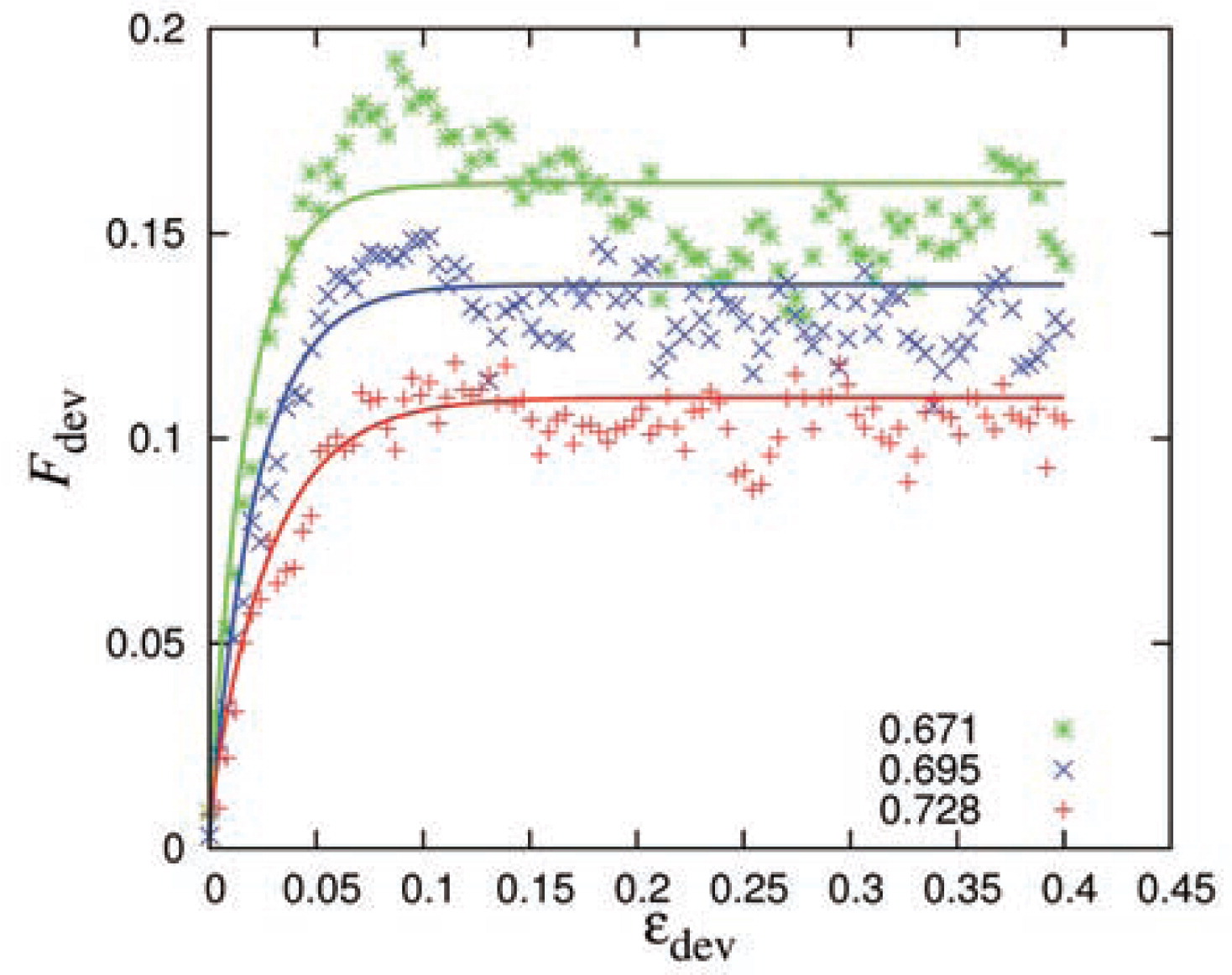
The evolution of the deviatoric fabric for the D3 mode is not shown since it resembles the behavior of the D2 mode, implying that the fabric evolution is pretty much insensitive to the deviatoric deformation protocol employed, as was observed before also for the stress ratio. A more detailed study of the (small) differences among deformation modes with different shape factors, as predicted by Thornton and Zhang, 2010, will be reported elsewhere.
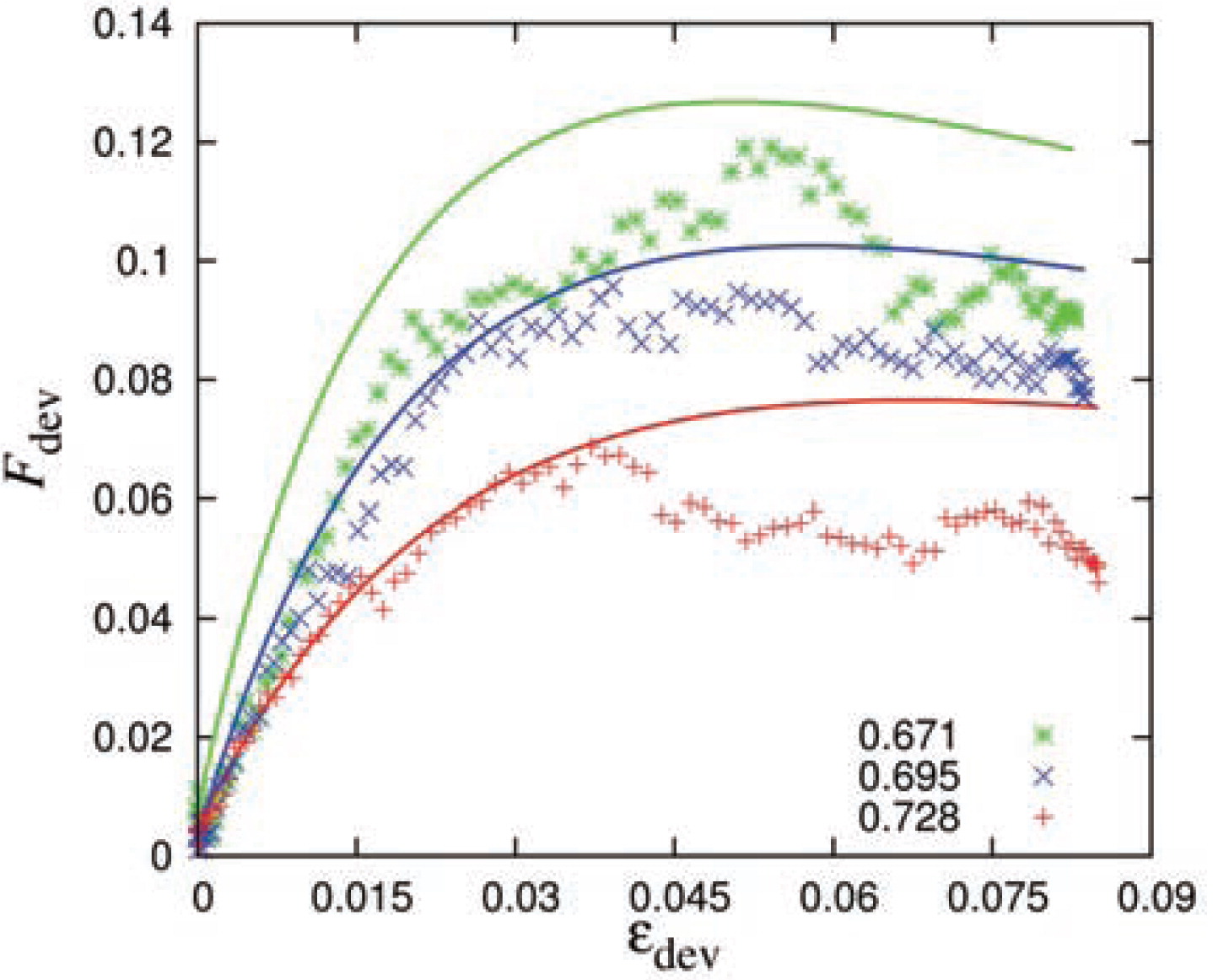
Fig. 14 shows the evolution of the deviatoric fabric during uniaxial compression as presented in section 6.2.1. The deviatoric fabric builds up as the deviatoric strain (and the volume fraction) increases. It begins to saturate at εdev ≈ 0.06 and a slight decreasing (softening) trend is seen towards the end of the loading path. The convergence of the deviatoric stress after large strain, for different volume fractions, as seen in Fig. 12, does not appear so clearly for the deviatoric fabric. The theoretical prediction of the constitutive relations from section 7 is in good qualitative agreement with the numerical data, but over-predicts the deviatoric fabric for larger strains. Their analytical form and the parameters involved will be discussed next.
Constitutive models are manifold and most standard models with wide application fields such as elasticity, elasto-plasticity, or fluid-/gas-models of various kinds were applied also to granular flows – sometimes with success, but typically only in a very limited range of parameters and flow conditions; for overviews see, e.g. GdR-MiDi, 2004; Luding and Alonso-Marroquín, 2011. The framework of kinetic theory is an established tool with quantitative predictive value for rapid granular flows only – but it is hardly applicable in dense, quasi-static and static situations (Luding, 2009). Further models, such as hyper- or hypo-elasticity, are complemented by hypoplasticity (Kolymbas, 1991) and the so-called granular solid hydrodynamics (Jiang and Liu, 2009), where the latter provides incremental evolution equations for the evolution of stress with strain, and involve limit states (Mašín, 2012) instead of a plastic yield surface as in plasticity theory. A strict split between elastic and plastic behavior seems invalid in granular materials, see, e.g. Alonso-Marroquín et al, 2005. More advanced models involve so-called non-associated / non-coaxial flow rules, where some assumptions on relations between different tensors are proposed, see Thornton and Zhang, 2006, 2010. While most of these theories can be or have been extended to accommodate anisotropy of the microstructure, only very few models account for an independent evolution of strain, stress and microstructure (see, for example, Thornton and Zhang, 2010; Sun and Sundaresan, 2011; Luding and Perdahcioğlu, 2011; Goddard, 2010) as found to be important in this study and many others.
In the following, we use the anisotropy constitutive model as proposed in Kumar et al., 2012a; Luding and Perdahcioğlu, 2011; Magnanimo and Luding, 2011, generalized for a 𝒟 –dimensional system:
| (16) |
In its simplest form, the model involves only three moduli: the classic bulk modulus B (Göncü et al., 2010), the octahedral shear modulus Goct, and the new variable “anisotropy modulus” A, evolving independently of stress with deviatoric strain. Due to A, the model provides a cross-coupling between the two types of stress and strain in the model, namely the hydrostatic and the shear (deviatoric) stresses react to both isotropic and deviatoric strains.
In the following, we test the proposed model by extracting the model parameters as functions of volume fraction v from various volume-conserving deviatoric simulations. The calibrated model is then used to predict the uniaxial deformation behavior (see the previous section). The theory will be discussed elsewhere in more detail (Kumar et al., 2012a; Magnanimo and Luding, 2012). In short, it is based on the basic postulate that the independent evolution of stress and structure is possible. It comes together with some simplifying assumptions such as:
The reduced model consists of two evolution equations for the deviatoric stress ratio sdev related to the mobilized macroscopic friction, and the deviatoric fabric Fdev based on DEM observations in 2D, see Luding, 2004, 2005. For volume-conserving pure shear, Figs. 11 and 13 show that sdev and Fdev grow non-linearly until they approach exponentially a constant value at steady state, with fluctuations where the material can be indefinitely sheared without further change. As discussed by Luding and Perdahcioğlu, 2011, the coupled evolution equations (16) are (with above assumptions) consistent with sdev approximated by:
| (17) |
| (18) |
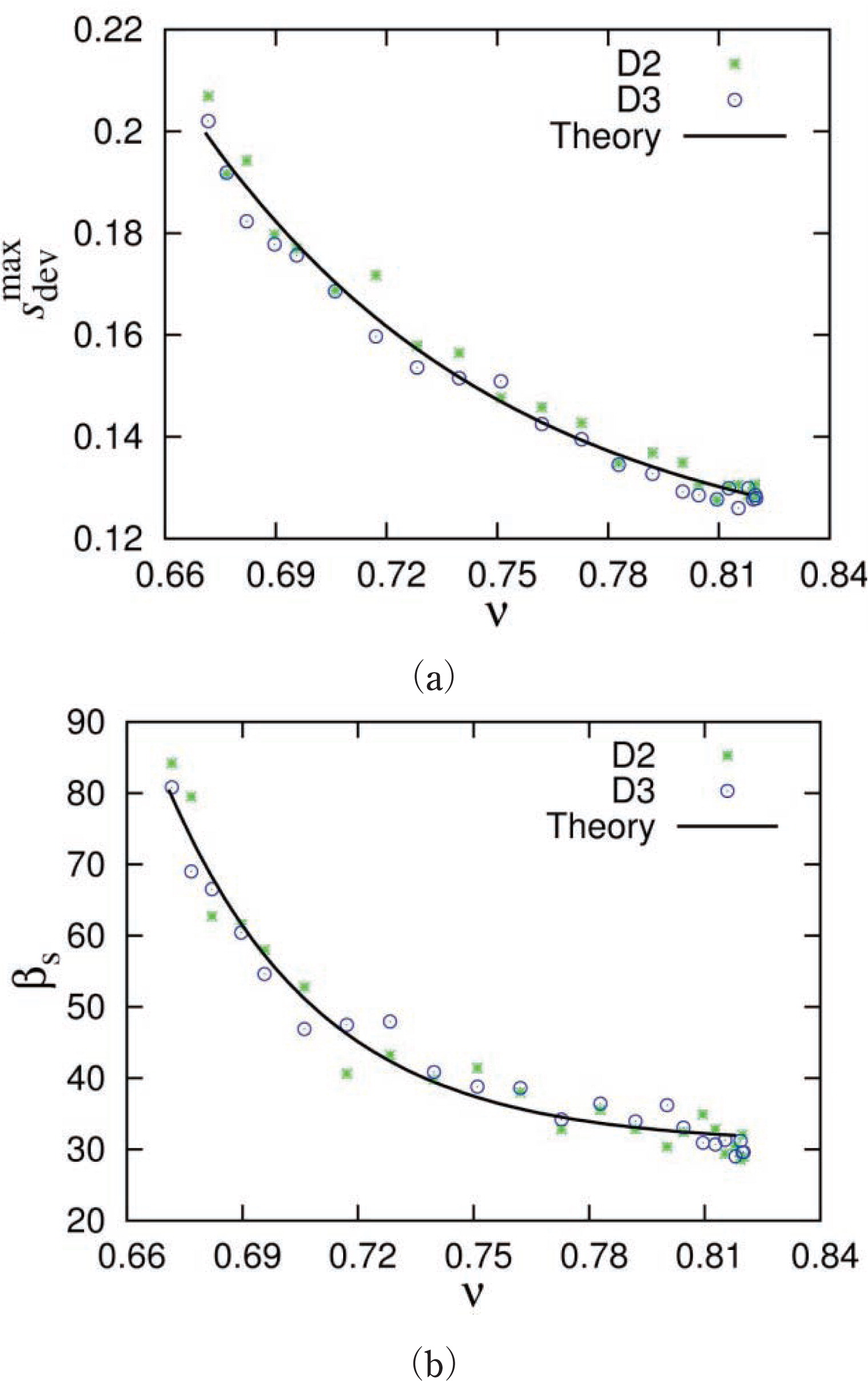
Comparison of evolution parameters from Eq. (17): the maximum normalized deviatoric stress
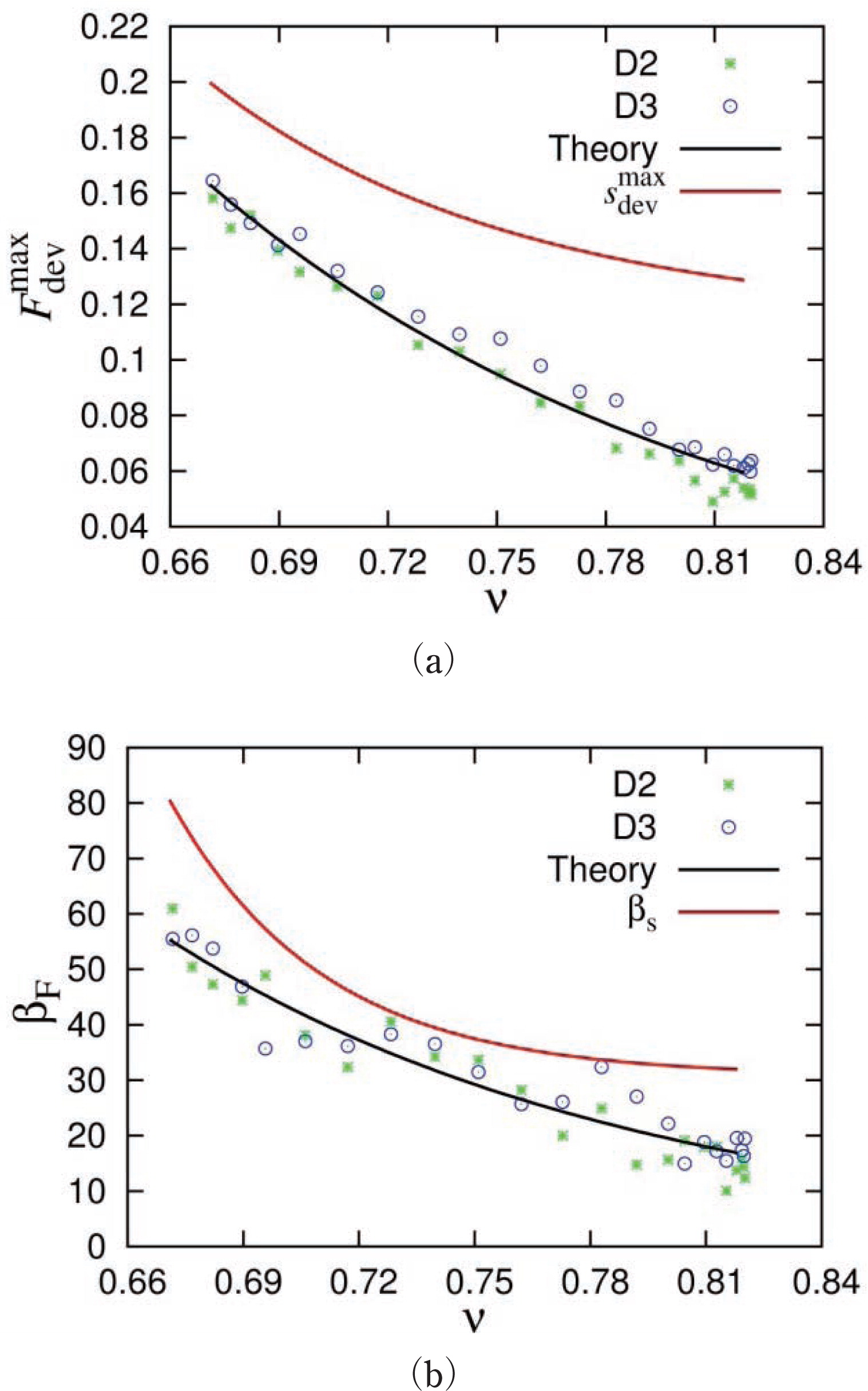
Comparison of evolution parameters from Eq. (18): the maximum anisotropy
As a final step, but not shown in this paper, in order to relate the macroscopic anisotropy (modulus) A to the evolution of the deviatoric fabric Fdev, one can measure the elastic modulus A directly. For this, the sample is subjected to incremental deformations (either isotropic or purely deviatoric) at various different stages along the (large strain) deviatoric paths for D2 and D3 deformations. Details of the procedure and the results will be reported elsewhere (Kumar et al., 2012a). Here, we only note that a linear relation is found such that:
| (19) |
From the analysis of various deviatoric D2 and D3 simulations with different volume fractions, using Eq. (17) we obtain the variation of
Fig. 16(a) shows the variation of
A different behavior of the normalized stress and the deviatoric fabric with respect to both parameters (maximum saturation value and the evolution rate) proves that stress and fabric evolve independently of deviatoric strain (La Ragione and Magnanimo, 2012), as is the basic postulate for the anisotropic constitutive model.
For the fit, we propose a generalized analytical relation for both the stress parameters
| (20) |
| Evolution Parameters | Qmax | Qv | α |
|
|
0.1137 | 0.09166 | 7.916 |
| βs | 30.76 | 57.00 | 16.86 |
|
|
0 | 0.1694 | 4.562 |
| βF | 0 | 57.89 | 5.366 |
We use the parameters determined from the deviatoric simulations presented in Table 3 to predict the behavior of uniaxial simulations in subsection 6.2, where the volume fraction is changing with deviatoric strain and hence dependence on v is needed to properly describe the deformation path.
Fig. 12 above shows the normalized deviatoric stress sdev against the deviatoric strain ϵdev for uniaxial deformations starting from three different volume fractions (v = 0.671, 0.695 and 0.728), compared with the predictions of Eq. (17) with coefficients
Fig. 14 shows the evolution of the deviatoric fabric Fdev with deviatoric strain ϵdev for uniaxial deformations – as above – together with the predictions of Eqs. (18) and (20). The model is still able to qualitatively describe the behavior of the deviatoric fabric, but with up to 30 percent over-prediction. For better quantitative agreement, the complete coupled model needs to be used and possibly improved as will be presented elsewhere (Kumar et al., 2012a).
The discrete element method has been used to investigate the bulk response of periodic, polydisperse, frictionless sphere packings in 3D, subjected to various deformation modes, in terms of both their micro-and macroscopic responses. The main goal was to present a procedure to calibrate a constitutive model with the DEM data and then to use the same to predict another independent simulation (mode). The (overly) simple linear material (model) allows us to focus on the collective/bulk response of the material to different types of strain, excluding complex effects due to normal or tangential non-linearities. Therefore, the present study has to be seen as a reference “lower limit”, and the procedure rather than the material is the main subject.
We focused on the strain-controlled loading and unloading of isotropic, uniaxial and two deviatoric (pure shear) type deformation modes (D2 and D3). Experimentally most difficult to realize is the isotropic deformation, while both uniaxial and deviatoric modes can be realized in various element tests where, however, often mixed strain- and stress-control procedures are applied. Both micro-mechanical and coarse-grained macroscopic properties of the assemblies are discussed and related to each other. The study covers a very wide range of isotropic, uni-axial and deviatoric deformation amplitudes and thus practically all volume fractions with mechanically stable packings – except for those very close to the jamming transition and higher than about 10 percent contact deformation, above which DEM pair contact models become questionable.
8.1 Microscopic quantitiesThe microscopic coordination number C, defined as the ratio of the total number of contacts to the total number of particles, has been analyzed as a function of volume fraction and deviatoric strain. By disregarding particles with less than four contacts (called rattlers), the corrected coordination number C* is well described by Eq. (11) for all deformation modes (since the particles are frictionless). For the uniform size distribution used here, the fraction of rattlers shows an exponentially decaying trend towards higher volume fractions, very similar for all modes, see Eq. (12) and Table 2. These analytical relations provide a prediction for the coordination number C = (1 − ϕr)C* that notably shows up in the macroscopic relations for both pressure and isotropic fabric, in combination with volume fraction v, instead of C*. Note that C* is better accessible to theory, while vC is related to the wave-propagation speed, which is experimentally accessible, while both are linked by the fraction of rattlers, which was already identified as a control parameter of utmost importance (Bi et al., 2011).
A small but systematic difference in C* and ϕr parameters appears for the different deformation modes. Most important, the jamming volume fraction vc is not a single, particular volume fraction, but we observe a range of jamming volume fractions dependent on the deformation modes, i.e. the “history” of the sample. Over-compression leads to an increase of vc, i.e. to a better, more efficient packing. Subsequent deviatoric (pure shear) deformations slightly reduce the jamming volume fraction of such a previously over-compressed packing, causing it to become less efficiently packed. Thus more/less efficient packing is reflected by a large/small jamming volume fraction and, inversely, small/large coordination numbers. The observed differences are more pronounced as the volume fraction becomes lower. A slight increase in the fraction of rattlers due to deviatoric deformations is also reported, as consistent with the decrease in coordination number.
8.2 Macroscopic quantitiesWhen focusing on macroscopic quantities, an important result from this study is that at small strains, the uniaxial, deviatoric and isotropic modes can be described by the same analytical pressure evolution, Eq. (15), with parameters given in Table 2, evidenced by the collapse of the data from these deformation modes when the scaled pressure is plotted as a (linear) function of the volumetric strain.
This linearity is due to the scaling with the nonlinear terms p* ∝ p/(vC) in particular. Thanks to the linear contact model used, it allows the conclusion that the non-linear (quadratic) corrections are due to the structural rearrangements and non-affine deformations. The scaled deviatoric and uniaxial results deviate from the isotropic pressure data. This appears at larger strains due to the build-up of anisotropy in the system, caused by deviatoric strain, obviously not present in the isotropic deformation mode. The good match of the data suggests an advantage of the “cheaper” uniaxial (and deviatoric) deformation modes over the experimentally difficult to realize isotropic deformation mode (three walls have to be moved simultaneously in the isotropic case, while a less complicated set-up is required for the other modes).
The deviatoric stress ratio (the deviatoric stress scaled with the isotropic pressure) as a function of the deviatoric strain develops almost independently of the volume fraction when the deviatoric magnitude is defined in a similar fashion to the second deviatoric invariant (Thornton and Zhang, 2006) for all quantities studied. The deviatoric stress builds up with increasing deviatoric strain until a steady state is reached (where we do not focus on peak and softening behavior, which becomes more pronounced when the jamming volume fraction is approached). Starting from isotropic initial configurations, we also show that the slope Goct/P of the normalized deviatoric stress as a function of deviatoric strain decreases with increasing volume fraction, unlike the shear modulus Goct, which increases with volume fraction. This indicates that the pressure (and bulk modulus B) has a “stronger” dependence on the volume fraction than the shear modulus.
From the macroscopic data, one observes that deviatoric and isotropic stresses and strains are cross-coupled by the structural anisotropy. The latter is quantified by the deviatoric fabric, which is proportional to the bulk anisotropy modulus/moduli A, as relevant for the constitutive model. Cross-coupling means that in the presence of structural anisotropy, isotropic strain can cause deviatoric stress responses and deviatoric strain can cause isotropic stress responses (dilatancy or compactancy). The structural anisotropy response to deviatoric strain is very similar to that of the deviatoric stress ratio. The response rates of both stress and structure anisotropies with deviatoric strain are functions of volume fraction and, most important, are different from each other.
8.3 Constitutive model calibrationAs a first step, the parameters of a simple constitutive model that involves anisotropy as proposed for 2D by Luding and Perdahcioğlu, 2011, Magnanimo and Luding, 2011 have been calibrated from DEM data. From the isotropic deformation mode, one can extract the bulk modulus B, as was done by Göncü et al., 2010. From the volume-conserving D2 and D3 modes, by fitting the idealized evolution equations for shear stress in Eq. (17), the macroscopic friction
As a second step and major result, the constitutive model calibrated on deviatoric data has been used to predict qualitatively (and to some extent also quantitatively) both stress and fabric evolution under uni-axial deformation. This is very promising, since the basic qualitative features are caught by the model, even though it was used in a very idealized and short form, with the single anisotropy modulus A ∝ Fdev the only main new ingredient. Several additional terms of assumed minor impact are ignored and have to be added to complete the model, see Kumar et al., 2012a; Magnanimo and Luding, 2011; Sun and Sundaresan, 2011; Thornton and Zhang, 2010, and references therein, as postponed to future studies. (For example, an objective tensorial description of stress, strain and fabric involves also the third tensor invariants. Alternatively/equivalently, these deviatoric tensors can be completely classified by the shape factors in their respective eigen-systems, which allow us to distinguish all possible deformation and response modes in 3D.)
8.4 OutlookIn this paper, we have reviewed and presented new results for frictionless particles undergoing isotropic, uniaxial, and (pure) shear deformation. Since the particles are too idealized here, the results cannot be applied to practical systems where shape, friction, and other non-linearities are relevant. However, they form the basic reference study with details given on the calibration procedure that yields a constitutive model with satisfactory predictive quality. Therefore, the next steps in our research will involve more realistic contact models with friction, cohesion, and other physically meaningful material parameters. Only then can the validity of the analytical expressions be tested for realistic systems, to predict well the phenomenology for pressure as well as the scaling arguments for the deviatoric stress and fabric.
Laboratory element test experiments should also be performed with the biaxial box to validate the simulation results with realistic material properties. Macroscopic quantities that can be readily obtained experimentally – for example, the pressure-volume fraction relation and the shear stress evolution with deviatoric (pure shear) strain – can then be compared with simulation data. Moreover, the work underlines the predictive power of constitutive models with anisotropy (as in Luding and Perdahcioğlu, 2011; Magnanimo and Luding, 2011; Sun and Sundaresan, 2011) that can be further tested, validated and extended with more advanced physical and numerical experiments.
Given the detailed insights from DEM, the (missing) terms and the parameters for the constitutive models can now be further analyzed to perform the rigorous micro-macro transition.
Open questions concern, among others:
For future application, the present calibration procedure should be checked also for other materials and applied to different element tests, among which there are (cylindrical) triaxial tests, ring-shear tests and also avalanche flow experiments like in chutes or rotating drums, all of which are more widely available than the “academic” biaxial box. In the end, the material properties and parameters should not depend on the element test chosen and the predictive value of the model(s) should be proven for more than only one validation test, be it another element test or a real-size or lab-scale process such as, e.g. granular flow in a silo or during a landslide.
Helpful discussions with F. Göncü, J. Ooi, M. B. Wojtkowski and M. Ramaioli are gratefully acknowledged. This work is financially supported by the European-Union-funded Marie Curie Initial Training Network, FP7 (ITN-238577), see http://www.pardem.eu/ for more information.
Olukayode I. Imole
;%0A%09%09%09newWindow.document.open();%0A%09%09%09newWindow.document.write('<img src=%22./Graphics/30_2013011_17.jpg%22>');%0A%09%09%09newWindow.document.close();%0A%09%09)
Olukayode I. Imole completed his BEng degree in mechanical engineering at the University of Ado-Ekiti, Nigeria. He received the DAAD scholarship to study for a MSc degree in quality, safety and environment at the Otto-von-Guericke University, Magdeburg, Germany, where he worked with the mechanical process engineering group chaired by Prof. Jürgen Tomas. His master’s thesis was titled “Investigation of the kinetics of disintegration processes during titania nanoparticle synthesis”. He is presently on a Marie Curie fellowship for his PhD in the multi-scale mechanics group, Faculty of Engineering Technology (CTW), chaired by Prof. Stefan Luding at the University of Twente, Netherlands. His research interests include experimental work on element tests with focus on cohesive powders, discrete element simulations of frictionless, frictional and cohesive granular assemblies and other industry-relevant research. He collaborates with other researchers in various institutions and industries including TU Braunschweig, Germany, UT Compiegne, France, and Nestle Research, Switzerland.
Nishant Kumar
;%0A%09%09%09newWindow.document.open();%0A%09%09%09newWindow.document.write('<img src=%22./Graphics/30_2013011_18.jpg%22>');%0A%09%09%09newWindow.document.close();%0A%09%09)
Nishant Kumar is a PhD student in the multi-scale mechanics (MSM) group at the faculty of Engineering Technology, CTW, University of Twente, Netherlands. He finished his B.Tech. degree in Chemical engineering at the Indian Institute of Technology (IIT), Kanpur, in 2008. He received his MS with honors in Mechanical engineering from the University of California, San Diego (UCSD), in 2008. Later, he joined the MSM group in 2010. His research interests include the constitutive modeling of materials with an internal micro-structure such as soils and cohesive powders and his focus is on anisotropy models. He is also working on shear jamming in granular materials.
Vanessa Magnanimo
;%0A%09%09%09newWindow.document.open();%0A%09%09%09newWindow.document.write('<img src=%22./Graphics/30_2013011_19.jpg%22>');%0A%09%09%09newWindow.document.close();%0A%09%09)
Vanessa Magnanimo is assistant professor in the multi-scale mechanics (MSM) group at the faculty of Engineering Technology, CTW, University of Twente, Netherlands. She received a MSc degree in construction engineering from the Politecnico of Bari, Italy, with subsequent graduate studies on the elasticity of discrete materials. In 2007 she received her PhD in continuum mechanics from the same university. She was a visiting scientist at the Levich Institute - CCNY (2005) and at T&AM - Cornell University (2008). Her research interests concern theoretical analysis and modern simulation techniques applied to sound propagation and the constitutive modeling of materials with an internal micro-structure such as soils, asphalt, powders and bio-materials.
Stefan Luding
;%0A%09%09%09newWindow.document.open();%0A%09%09%09newWindow.document.write('<img src=%22./Graphics/30_2013011_20.jpg%22>');%0A%09%09%09newWindow.document.close();%0A%09%09)
Stefan Luding studied physics at the University of Bayreuth, Germany, focusing on reactions on complex and fractal geometries. He continued his research in Freiburg for his PhD on simulations of dry granular materials in the group of Prof. A. Blumen. He spent his post-doctorate time in Paris IV, Jussieu, with E. Clement and J. Duran before he joined the computational physics group with Prof. Herrmann for his habilitation. In 2001, he moved to DelftChemTech at the TU Delft in Netherlands as associate professor for particle technology. Since 2007 he has held the chair on multi-scale mechanics (MSM) at the Faculty of Engineering Technology, CTW, at the University of Twente, Netherlands, with ongoing research on fluids, solids, particle interactions, granular materials, powders, asphalt, composites, bio- and micro-fluid systems and self-healing materials. Stefan Luding has been managing editor in chief of the journal Granular Matter since 1998. He has written more than 200 publications and is a member of several international working parties, including presidentship of AEMMG that organizes the Powders and Grains Conference in 2009 and 2013.
{kind=link}