論文
大きな磁歪を示す鉄合金を搭載したデバイスの振動におけるひずみや磁界の変化

2024 年 110 巻 5 号 p. 404-413

詳細
2024 年 110 巻 5 号 p. 404-413
To understand the mechanism of vibration energy harvesting using magnetostrictive Fe-Ga alloys, the dynamic strains at different locations of a U-shaped device during vibration were simulated. In the simulations, the previous results for location-dependent strain in the vibration experiments were fitted with trigonometric functions. The results show that the amplitude and phase of the strain vary with location, and that the electromagnetic force is generated at different locations. Since magnetic induction is thought to occur due to an external magnetic field, the magnetic domain structure near the cube orientation of Fe-Ga alloy single crystals was observed using a Kerr effect microscope. As a result, Bloch magnetic domain structures with different contrasts of brightness and darkness were observed depending on the applied magnetic field. It was shown that striped magnetic domains were dominant when the applied magnetic field was small, while lancet magnetic domains oriented to the magnetic field appeared with transverse straight supplementary domains as a magnetic domain under a saturated magnetic field. The domain patterns in one direction magnetic fields were not necessarily the same as those observed in the opposite direction. This indicates that Fe-Ga alloy single crystals are used as a core for vibrational energy harvesting. Also, the motion of magnetic walls is thought to play an important role in the vibrational properties of the material, and inhomogeneous elastic strain associated with magnetic domains evolves microscopically in single crystals.
IoT(Internet of Things)技術は,各種センサーや駆動機器の動作などの情報を,ネットワークを通じてサーバーに送り各機器の動作状況などを監視する技術である1,2)。それらの要素技術は近年徐々に進歩し,将来は大量の情報が処理され周辺技術はさらに普及することが予想される。IoTの無線通信に使われる電力として,環境発電(エネルギーハーベスティング)による微小電力が注目されており,そのエネルギー源としては,光エネルギー,力学エネルギー,熱エネルギーなどがある。環境発電で作られるエネルギーは発電ユニットで電気エネルギーに変換され,それらはセンサーなどの情報を送受信する通信ユニットなどで使われる3,4)。これらの環境発電の中で,力学エネルギーの一つの振動エネルギーは比較的大きく,磁歪式振動発電などに関する技術開発が進められている4,5)。それらの材料には,磁歪特性6,7,8,9)だけでなく軟磁性特性に優れた磁心材料等も含まれており,結晶磁気異方性等を考慮して特定方位の単結晶を利用した高性能デバイスが得られる10,11,12,13)。
振動発電をIoTの無線通信などに応用するために,幾つかの構造の磁歪式の振動発電デバイスが考案されてきた6,7)。その発電デバイスには大きな磁歪を示すFe-Ga合金単結晶が用いられ,もともと2000年頃に見いだされた9)。最近では,その合金単結晶の大型化が進み,チョクラルスキー法により特殊な条件下では直径2インチの長い単結晶のインゴットが得られている。このインゴットから切り出した板材は優れた磁歪特性を示すことも確認されており10),これには弾性的な異方性が関係していると考えられている11,12,13)。
強磁性体などの内部には,磁区(magnetic domain)と呼ばれる領域(磁気モーメントがS極からN極へ向いた領域)があり,各磁区の間には磁壁(domain wall)と呼ばれる境界がある14,15)。磁区は磁壁により分離しているが,軟磁性材料では外部磁界や内部応力などによって磁壁が移動し磁区構造が変化する10,16,17,18,19,20,21,22,23,24)。例えば,立方晶の一つの面で見ると,4つの方向の磁気モーメントを持つ磁区があり,軟磁性体では磁界がないときにはほぼ磁化を打ち消しあっている。軟磁性材料においては,変動する外部磁界に対して応答する状況のシミュレーションを行うこともできる25)。このような磁区は,磁性微粒子を懸濁したコロイドを磁性体に塗布して顕微鏡で直接観察することによって確かめられた(Bitter法)。さらに,磁区の理論やモデルが提案され,磁性体が磁化をもつと磁極間に反磁界が働き,磁区に分かれやすくなることが確認された。また,強磁性体における磁気的なノイズ(Barkhausen noise)が見出され,その主な原因は180°磁壁と格子欠陥の間の相互作用によるものとされている。すなわちBarkhausen noiseは,磁壁が移動するときにピンニングサイトの格子欠陥の影響を受けて不連続な動きをするときに発生する。一般に,磁界が小さいときにこのノイズが大きい傾向があり,このようなノイズは試料にU字型ヨークで発生させた交流磁界を印加し,ピックアップ・コイルを用いることで検出される。磁性体内の磁区では,1つのN極は他のS極と接することで内部の磁極は打ち消し合うため,磁性体表面に磁極が残り,表面で磁区が観察されることになる。磁性を階層的レベルで見ると様々な磁区や応力が特性に寄与しており,様々なレベルでの磁性に影響する因子等をデバイス設計で考慮する必要がある。
大きな磁歪を示すFe-Ga合金単結晶による振動発電の発電量は大きいため,その無線通信用電源などへの本格的な応用が進んでいる7)。デバイスを組み立てるときには,板状にしたFe-Ga合金をU字型の強磁性フレーム材に張り合わせる。上部のフレームの合金単結晶の周囲にはソレノイドコイルを取り付け,そこから電力を取り出す。必要に応じて,下部フレームに永久磁石を取り付け,出力を大きくする。それらのフレームからなるU字型振動デバイスの構造は単純であり,磁歪合金,コイルなどをデバイスへ組み込むのは容易である。デバイスによって生じた電力から信号を送ることも可能である。一方,連続的な振動をエネルギー源に用いると,LPWA(Low Power Wide Area)ネットワーク技術に応用でき,一定時間間隔で長距離にセンサーからのデータを送信することができる。しかし,U字型デバイスの振動によって生じるひずみについては不明な点があり,外部磁界による磁区変化や振動発電における磁石の役割は明瞭でない。
そこで本論文では,まず磁歪式振動発電に用いられるU字型デバイスにおける振動の方位依存性の結果13)の振動解析を行うこととした。また,振動デバイスに取り付けたFe-Ga合金では逆磁歪効果や磁界などで磁束変化が起こり,コイルで起電力が発生する26)。このため,変動する磁界のシミュレーションを行うことで振動発電の機構について検討することとした。さらに,U字型デバイスで発電効率を向上させる永久磁石に起因する電磁誘導による磁区変化を理解するため,Fe-Ga合金単結晶での磁区観察を行うこととした。
Fe-Ga合金などの磁歪材料による振動発電の特性を理解するには,一般的な振動に対するデバイス(特にU字型デバイス)の応答性について知る必要がある。それを基に,Fe-Ga合金による振動発電への振動で変動する磁界による磁束変化,逆磁歪効果による磁束変化などの影響について考慮した方が良い。
振動の基本となる1自由度の減衰振動を考えると,これは一回の衝撃モードでの減衰振動に対応し,実際の振動系において振動子(質量m)の運動に減衰力が働くとともに,減衰力を粘性(ダッシュポット)による粘性力が作用する。このため,ばねによる復元力は振動の妨げになるので,それらを取り入れた振動の運動方程式を考える。この減衰振動における運動方程式(xは座標)は,ばね(ばね係数k)による復元力およびダンパー(粘性係数c)による粘性力を考慮すると,次のようになる。
| (1) |
この方程式において,減衰比
| (2) |
この式で,F0は力の振幅,ωは外力の角周波数である。この振動が始まり少し時間が経過すると振動は定常的になった。これは(2)の微分方程式の一般解の項に指数が負である指数関数の積が含まれており,十分時間が経てば一般解の値がゼロに収束するため,特殊解のみを考えれば良いことを意味する。そのため,振動x(t)は以下の式(3)のように表すことができる。
| (3) |
ここで,AおよびBはそれぞれ余弦項,正弦項の振幅であり,次の関係がある。
f0はF0を質量で除した項,ω0は共振角周波数を表している。式(3)を合成すると,式(4)のようになる。
| (4) |
ここで,
実際の強制振動では,試料の形状が同様でも弾性率の違いにより,振動状態が異なることがある。例えば,振動発電デバイスに取り付けた同じ形状の鉄合金単結晶でも,結晶方位が異なると振動によるひずみや磁束密度の変化が大きく異なることを示している。本研究では,試料は全長300
mmのFe-16at%Ga合金結晶を,15.8×5.9×0.49の大きさで長手方向の方位が,[001]および[111]となるようにワイヤ放電加工で切り出して,振動発電で発生する起電力やひずみを実測した結果を参考とした13)。それぞれの試料の長手方向にひずみゲージ(Gauge 1, 2,
3)を直線上に等間隔で3箇所貼り付け,Gauge 1, 2, 3と振動時の曲率が小さくなる方向にU字型のデバイスに試料を装着した13)。デバイスの共鳴周波数である274
Hzの動的振動場を印加し,ひずみゲージでひずみ測定を行った。ひずみゲージの測定によって得られた波形を式(3),(4)でフィッティングし,A,
Bおよびそこから計算される振幅
電磁誘導による振動発電のシミュレーションでは,振動デバイスの構造に着目し,例えば,フレームに取り付ける磁心材料の特性や外部磁場用の磁石の配置を変えて,各箇所における磁束などを見積もることになる。これらの見積りでは,力学的振動に応答する微視的ひずみ(上記の磁区構造)の方位依存性などを考慮して,妥当なパラメータを用いてシミュレーションする。一連の見積りから,軟磁性の磁心材料の応答における飽和磁化などの影響に関する知見を得ることができる。
電磁誘導方式は,磁場(永久磁石も利用)とコイルの相対変位を利用した永久磁石とコイルとの相対変位を利用したもので,発生電圧は式(5)に基づいている。
| (5) |
この関係では,単位時間当たりの磁束変化と巻数が発生電圧に関係づけられており,Faradayの法則に対応する。
振動デバイスの下部フレームにN極とS極の向きの二つの磁石を配置させ,上部フレームに磁心材料を配置した。上部フレームが上下に変位すると磁心材料での磁束が変化し,電磁誘導により起電力が発生する。この磁束の流れをAnsys-Maxwellのソフトウェアで3次元的に見積もった25)。この時,磁束密度変化により発生する電力を磁心材料(磁歪合金)に巻いたコイルから取り出し,フレームの変形に伴う磁場の変化から発生するコイルで発生する電圧を見積もることができる。
2・3 磁区構造の評価法Fe-Ga合金単結晶の振動発電特性に影響する要因を理解するため,磁区観察により結晶方位が磁歪特性などに及ぼす影響を調べてきた。また振動発電デバイスに磁歪材料を取り付ける際に,振動中の不均一ひずみが課題となっていた13)。これらの課題を軽減するため,軟磁性合金単結晶の力学的振動への応答性の向上や,磁石の磁束変化が容易になるような検討が行われた。その後,デバイスの構造を改善して振動応答性を向上させる工夫が行われた。例えば,Fe-Ga合金単結晶(100)[001]に対して,引張応力負荷と磁場印加を行った際の磁区構造が推定された16)。無磁場状態の磁区構造から磁場印加を行った場合,磁区構造の変化が大きいことが示唆されている。ここから,振動発電において外部からの磁場の影響が大きいことが示唆されたため,振動による磁界の変化をさせる実験を行った。
磁性材料が飽和磁化に達しているときには,磁区が一つ(単磁区)になっているが,磁界が少し減少すると磁化も低下し磁区構造が変化する。例えば,Fig.1に示すように,磁界が大きいときには表面から見て櫛(クシ)状のランセット磁区が生成し,磁界が小さいときには異なる磁気モーメントの磁区が混在する。異なる磁気モーメントの磁区の割合は,外部磁界が非常に小さいときに同程度になる2)。
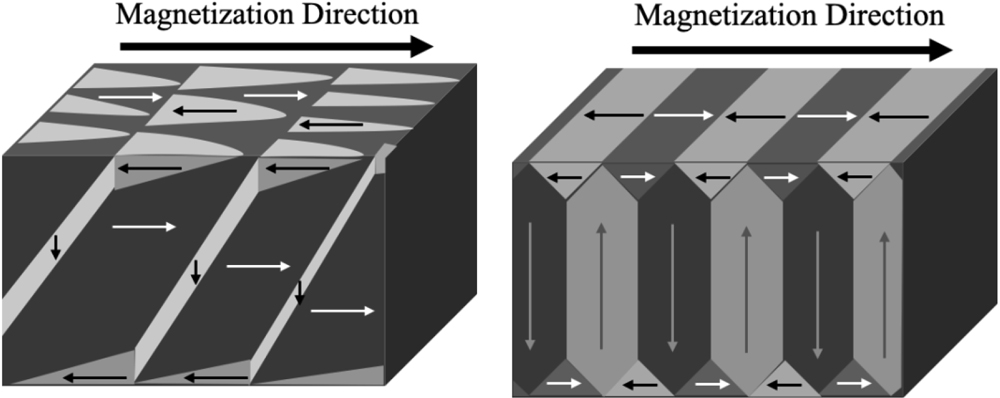
Schematics of supplementary domains. (left) Lancet magnetic domains in the shape of a comb and (right) parts of stripe-shaped magnetic domains.
ランセット磁区の部分の磁気モーメントは,周囲の磁区の磁気モーメントと異なっており,反磁界によって生成する。反磁界Hd(OeまたはA/m)は磁化M(T)がつくる磁極によって生じるために,その値は磁化に比例し,この比例係数は反磁界係数と呼ばれる。このため,反磁界係数はテンソルで表され,磁性体のミクロ組織,下部組織,内部応力等によっても影響される17,18)。それらにも配慮し,磁区を観察する顕微鏡観察法に幾つかあり,ここでは磁気光学的効果(Kerr効果など)を利用した。なお,試料は,Fe-16%Ga合金単結晶で,[001]から2度程度ずれた方位の試料を観察した。
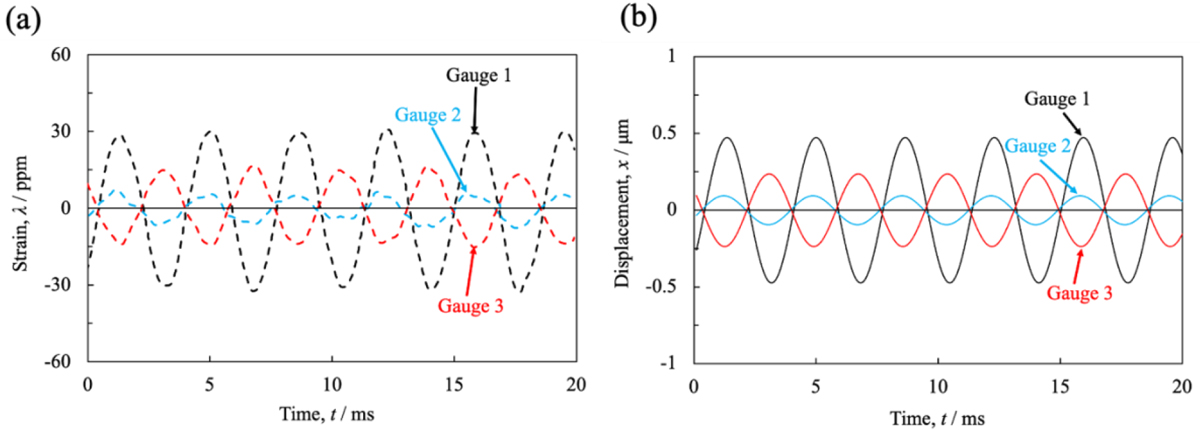
長手方向が[001]となるように切り出した試料をデバイスに貼り付け,動的振動場を与えてひずみをひずみゲージで測定し,その結果をフィッティングした。ひずみ量に試料長さを乗じることで時間ごとでの座標xを算出した。実際の測定結果およびフィッティングの結果はFig.2のようになった。

(a) Time variation of strain obtained from strain measurements at each strain gauge for the sample in [100], and (b) time variation of displacement obtained by fitting with trigonometric functions and multiplying by the sample length. (Online version in color.)
フィッティングで得られたA, Bの値から,位相と振幅を計算した結果をTable 1に示す。Gauge 1,2の位相差は7.3×10−2πで位相差は非常に小さかったが,Gauge 1,3の位相差は−1.06πで,約−πの位相差が見られた。
| Gauge 1 | Gauge 2 | Gauge 3 | |
|---|---|---|---|
| Phase [rad] | 0.41 | 0.63 | −2.9 |
| Amplitude [μm] | 0.82 | 0.27 | 0.31 |
位相と振幅の変化を評価するために,各Gauge間におけるA, Bの値を最小二乗法による直線近似で導出し,Gauge1,2,3の間を補完するような振動の式を推定し,振幅と位相の変化を動的に表して解析を行った。その結果,Gauge1から3へと移動するにつれて,振幅が減少し,−π位相がずれ,振幅が増加するという過程を経ていることがわかった。
3・1・2 [111]方向に切り出した試料の振動解析3・1・1と同様の手法で,長手方向が[111]となるように切り出した試料に動的振動場を与え,ひずみゲージでひずみを測定し,式(3)とフィッティングを行い,座標xを算出した結果をFig.3に示す。
(a) Time variation of strain obtained from strain measurements at each strain gauge for the sample in [111], and (b) time variation of displacement obtained by fitting with trigonometric functions and multiplying by the sample length. (Online version in color.)
フィッティングで得られたA, Bの値から,位相と振幅を計算した結果をTable 2に示す。Gauge 1,2の位相差は−0.21πで,位相差は小さかった。一方,Gauge 1,3の位相差は0.86πで,約+πの位相差が見られた。
| Gauge 1 | Gauge 2 | Gauge 3 | |
|---|---|---|---|
| Phase [rad] | −1.1 | −1.7 | 1.6 |
| Amplitude [μm] | 0.47 | 9.5×10−2 | 0.24 |
3・1・1と同様の手法で,各Gauge間でのA, Bの値を最小二乗法で直線近似し,振幅と位相の変化の解析を行った。その結果,Gauge1から3と移動するにつれて,振幅が減少し,+π位相がずれ,振幅が増加するという過程を経ていることがわかった。
3・2 変動する外部磁界による起電力の見積もりU字型の振動デバイスでは,アクチュエータにより下部フレームが主に正弦波的に振動し,主に上部のフレームが振動する。下部フレームには永久磁石が設置してあり,その磁界に対して,上部フレームが上下に変動すると発電量が大きくなる。ここでは,比較的形状が単純なU型振動デバイスに対して,上部フレームが上下に振動したときの磁界の変化を見積もった26)。上下に振れる振動数はおおよそ60 Hzであり,コイルの巻き数は3000回転であった。なお,磁石を設置しないときには磁心材料の逆磁歪効果が起こり,それによる磁束が発生する。大きな磁歪を示すFe-Ga合金単結晶では,この振動発電デバイスでは2.5 V程度の起電力が発生する26)。これに,下部フレームに設置した磁石による外部磁界が作用すると15 V程度の起電力が発生する。
発生する起電力に及ぼす外部磁界の影響を明らかにするために,上部フレームが上下したときの磁束等を見積もった。Fig.4は,下部フレームにN極とS極の磁石(Br=1.3 T,Hc=1.3 kA/m)極性を考慮して配置し,上部フレームにFe-Ga合金の相当の特性をもつ軟磁性材料を配置して,機械的振動を加えた場合の3次元シミュレーションによる磁束変化の例を示している。この図では,上部フレームが ± 40%(±7 mm)程度上下し,矢印方向に磁束が発生したことを示している。この相対的な振幅により8×10−6 Wb程度の磁束が発生したと見積もられた。磁束へコイルの巻き数(3000回)と機械的振動の振動数(60 Hz)を乗じることにより,14 V程度の起電力が発生すると計算された。実際の振動発電デバイスでは15 V程度の起電力が発生しているので,本シミュレーションの結果は実験結果と比較的良好な対応が得られた。誤差要因としては,ヤング率等の弾性係数の違いに起因する鉄鋼材料の変形のしやすさの違いや,永久磁石を設置している箇所(下部フレーム)の変形を考慮していない点などが挙げられる。本シミュレーションの結果より,外部磁界は発生電圧に対して重要な役割を演じており,Fe-Ga合金の逆磁歪効果が加わっていると考えられる。また,逆磁歪効果による振動発電特性は本来磁石なしで調べるべきであるが,それを考慮せずに巨大逆磁歪効果という表現も使われている場合があるので注意を要する。

Examples of magnetic flux change estimated by three-dimensional simulation when N- and S –polarized magnets are placed in the lower frame and magnetic core material is placed in the upper frame and vibration is applied. Magnetic flux changes when the upper frame is displaced (a) upward, (b) in the middle position, and (c) downward. Arrows indicate magnetic flux direction. (Online version in color.)
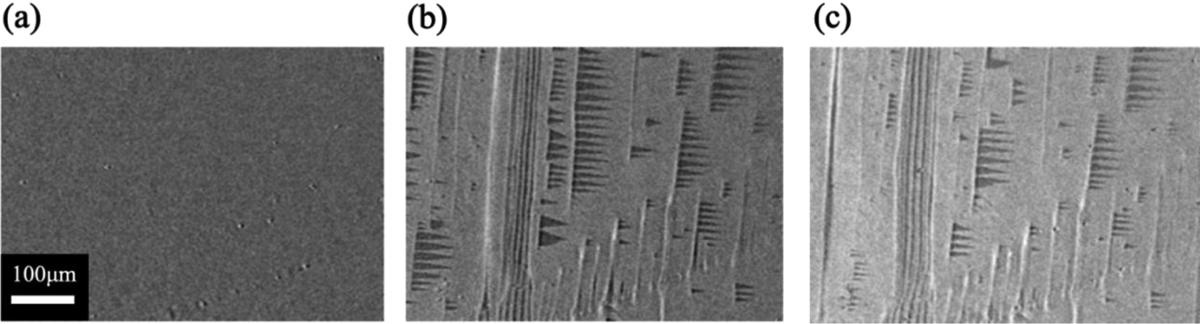
磁性体表面で現れる磁区構造は各種の顕微鏡でしばしば観測されおり,一般に外部磁界がゼロの付近(磁性体の磁化はゼロ)では,異なる磁気モーメントの磁区はバランスが取れている。ここでは大きな磁歪を示し振動発電に有望とされているFe-Ga合金単結晶の磁区構造について示す。磁界が小さいときの磁区の変化の例として,Fig.5に左方向から右方向へ印加する磁界を−12.7 kA/mから,0 kA/m,12.8 kA/mと変化させたときの磁区構造の変化を,Fig.6に磁化曲線を示した。Fig.6の磁化曲線より,飽和磁化に達する外部磁場(250 kA/m程度)より十分に小さな12.8 kA/mの外部磁場がかかっている状態においても,Fig.5より磁区構造の変化は大きかった。またFig.5より,磁界がゼロに近いときには白と黒のコントラストがほぼ同程度であるが,白いコントラストと黒いコントラストの部分は必ずしも逆転していない。Fig.5の黒い部分と白い部分の画像全体に対する面積比を計算した結果をFig.7に示した。Fig.5の撮影場所はほぼ同一であり,同様の撮影条件で画像を取得した。そのためFig.5の画像の面積比の計算においては,画像の明るさ等の影響の考慮は不要であると考えられる。画像の面積の計算においては,外部磁場がゼロの状態であるFig.5(b)の白黒の割合が最も50%に近い値となるような色をしきい値とし,Fig.5(a),(c)の白黒の面積比を計算した。外部磁場の絶対値が同じであるため,本来であればFig.5(a)の白い部分と(c)の黒い部分の面積比はほぼ同じになるはずである。しかし(a)の白い部分は画像中の約98.1%の面積を占め,(c)の黒い部分は約70.9%の面積を占めており,画像中の面積比が異なっていた。これは,試料の磁化が磁場印加方向依存性を持つこと,内部や表面の磁区が同一でないことなどが影響しているためと考えられる。

Magnetic domains when the applied magnetic field is varied from (a) −12.7 kA/m, (b) 0, and (c) 12.8 kA/m.

Magnetization curve for Fe-Ga sample.

Percentage of black/white areas of Fig.5 image.
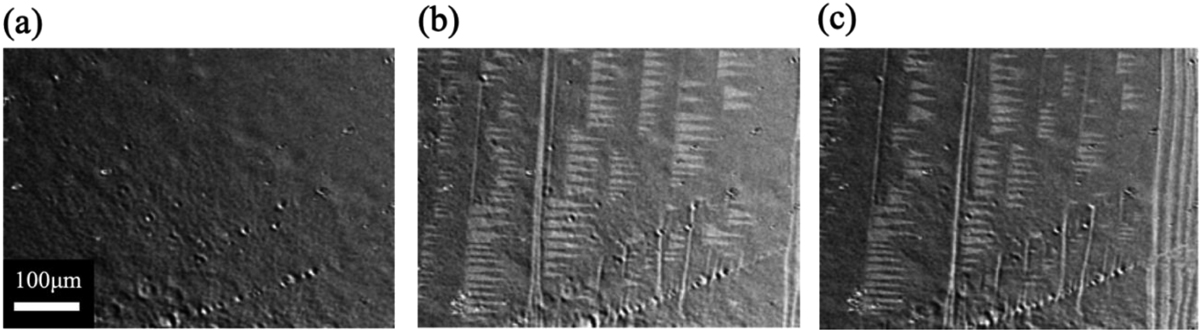
一方,Fig.8に,右方向から左方向へ印加する磁界を,12.8 kA/m,0 kA/m,−12.7 kA/mと変化させたときの磁区構造の変化を示す。この場合も,磁界がゼロに近いときには白と黒のコントラストが同程度であるが,白いコントラストと黒いコントラストの部分は逆転していない。これらの磁区パターンは縦方向に縞状磁区をしており,ゼロ磁場付近において磁界を反転させても,磁区の反転は完全ではなく,磁壁の移動の経路は全く同じ過程をたどらないことを示唆している。

Magnetic domains when the applied magnetic field is varied from (a) 12.8, (b) 0 and (c) −12.7 kA/m.
次に,右方向への磁界で飽和に達した状態から印加する磁界を,89.5,76.7,69.3 kA/mと低下させたときの磁区のパターンの例を,Fig.9に示す。89.5から76.7 kA/mに磁界を減少させたときには,ランセット磁区が観察されている。さらに磁界を減少させるとランセット磁区の割合が減少し,縞状磁区が徐々に表れてくる。
Magnetic domains when the applied magnetic field is varied from (a) 89.5, (b) 76.7 and (c) 69.3 kA/m.
さらに左方向への磁界で,飽和磁化の状態から印加する磁界を,89.5,76.7,69.3 kA/mと低下させたときの磁区のパターンの例を,Fig.10に示す。89.5から76.7 kA/mに磁界を減少させたときには,ランセット磁区が観察されている。さらに磁界を減少させると,ランセット磁区の割合が減少し,縞状磁区が徐々に表れてくる。このような挙動は,この合金の磁気特性と概ね対応している。ただしこれらの磁気特性は,合金試料のサイズや結晶方位,内部応力などにも依存する17,18)。このため,ある程度の広い範囲の磁区を観察し,多くの観察結果を統計的に整理して,観察結果と磁気的特性との関連性を検討する必要がある。
Magnetic domains when the applied magnetic field is varied from (a) −89.5, (b) −76.7 and (c) −69.3 kA/m.
結晶性の材料中には格子欠陥が存在し,その周囲には弾性的なひずみ場による内部応力が生じる。特に転位などの格子欠陥は結晶中に残留しやすく,その周囲には弾性的応力場が存在するため,それと釣り合う複雑な残留応力が生じる。この応力は材料の加工条件や熱処理の条件等に大きく依存し,外部や内部の応力がない材料および内部応力がある材料における残留応力として測定される。その応力はテンソルとして表され,通常各成分の値は±10~100 MPa程度である。塑性ひずみが集中した周辺では,100 MPaを超えることもある。このような残留応力は格子欠陥の周囲に局部的に発生し,複雑な形状の還流磁区が生成するなどして磁区構造にも影響を及ぼすため,磁歪過程も変化すると推測される15)。それらの単磁区や還流磁区の構造によるエネルギーの違いも計算されてきた23)。これらの結果から,格子欠陥が磁歪過程などに複雑に影響を及ぼすことが知られている27)。
これまで,大きな磁歪を示すFe-Ga合金単結晶に磁場を印加したときの磁区観察の例が示されてきているが,これらの磁区観察の結果から,動的振動中においては永久磁石により発生する磁界の役割や磁区構造変化に関する理解が深まっている。これらの合金は軟磁性特性を示すと言えるが,その外部磁場や内部および外部の応力による磁区構造の変化は必ずしも十分に解明されていない。その理由は,格子欠陥の性質や量が十分に明らかになっておらず,結晶の場所によってそれらが磁区構造に複雑に作用しているためである。さらに,このFe-Ga合金は弾性的な異方性が大きく,巨視的だけでなく微視的に不均一な応力が磁歪や磁性に大きな影響を与える。そのため,磁気的な特性を制御するには,階層的に分布する応力状態の検討が必要であることが示唆されている。
数十µm~数mmオーダーの巨視的な残留応力の測定法として,2D法がある。2D法は二次元X線検出器を用いて回折X線によるリング(Debye-Scherrer ring)を取得し,そのゆがみの程度を評価することで残留応力テンソルを算出することができる。さらにテンソルの行列演算によって,応力楕円体を算出することができる。応力楕円体は主応力の方向,大きさ,種類(圧縮応力または引張応力)を可視化したものであり,残留応力の評価の上で重要な指標である。
また,電子顕微鏡レベルの微視的なひずみ評価法としてKAM(Kernel Average Misorientation)マップや,四元数表示によるひずみ評価がある。これらの手法では,電子後方散乱回折(EBSD)で測定エリアの方位を取得し,各測定点と周辺部の方位差を評価することにより,ひずみのマッピングを行うことができる。また,方位差が小さい箇所はひずみが小さく,方位差が大きい箇所はひずみが大きいものとしてマッピングされる。四元数表示によるひずみマッピングは,KAMマップと比較して,小さな方位差でも明瞭に可視化できるという特徴がある。応力とひずみは密接な関係があるため,微視的な応力状態を考察することができる。
さらに,材料の加工によって外部応力がかかると,残留応力が導入されるが,結晶方位や格子欠陥に影響され残留応力が不均一なこともある。最近の研究では,EBSDで得られる結晶方位から考察される変形メカニズムと残留応力とが関係づけられている28,29)。このため,EBSDは適切なFe-Ga合金などの設計のための強力なツールとなる可能性がある。
これらの手法を用いて,応力・ひずみの方向・分布を評価し,階層的な応力状態の評価を行える可能性がある。これらの応力・ひずみ状態と磁性・磁歪の状態の関係を考察することで,磁気的な特性の物理的メカニズムを明らかにできる可能性が示唆されている。
U字型のデバイスに設置した大きな磁歪を示すFe-Ga合金単結晶による振動発電は,室温において外部振動に対して合金が応答することによる磁束変化が主因となっていると考えられる。それらの因子を理解するために,本研究では振動デバイス上におけるひずみの不均一性,振動発電特性への永久磁石による変動磁界の影響,磁界による磁区構造の変化などについて調べた。それらの結果をまとめると以下のようになる。
(1)振動デバイスにおけるFe-Ga合金の振動発電特性における結晶方位依存性は大きく,振動シミュレーションの結果から<001>方位の合金の方が,<111>方位の合金の場合より振幅が大きかったので,大きな起電力が得られることが示唆された。本研究で用いたFe-Ga試料のような体心立方格子構造を持つ鉄基合金の弾性異方性の特徴についても調べられており10),この異方性がひずみの大きさに影響を与え,振幅の違いが見られたと考えられる。また試料の位置によって振動の振幅や位相が異なっており,さらに測定によって得られた値からひずみゲージ間の振幅や位相を計算によって予測する手法を新たに見出すことができた。振動発電デバイスでは,外部振動場によって生じる試料のひずみを大きくし,位相を制御することが重要であるので13),試料の結晶方位や試料の位置を予測する本手法は,デバイス設計において有用であることが示唆された。
(2)U字型デバイスに設置したFe-Ga合金では,外部の磁界がなくても逆磁歪効果により,ある程度の振動発電特性を示す。電磁界シミュレーションの結果から,外部からの変動磁界がある場合には,それによる電磁誘導により合金周囲のコイルに起電力が増大し,永久磁石が大きな役割を演じていることが新たなシミュレーションの手法から示唆された。このような振動発電デバイスは,デバイスの形状や磁石の配置などを十分に考慮する必要があるため,本シミュレーションの手法および得られた結果は,適切なデバイス設計に指針を与えるものとなっている。
(3)Fe-Ga合金の磁区観察の結果から,外部磁界が低いときでも磁壁が動きやすく,磁歪に変化が生じやすいことが示唆された。このように,Fe-Ga合金においては力学的応答だけでなく,変動磁場に対する応答性も重要である。試料の磁化のしやすさは試料の内部ひずみに依存しており,試料内部の転位が磁壁の移動を阻害し,磁化に影響を与えていると考えられる27,30)。また,試料の大きさや形状が磁化の過程に影響を及ぼすことが知られている。先述した外部磁界の磁束見積もりの過程ではそれらを考慮する必要があり,優れた振動発電特性においてはこれらの因子が複合して作用していると考えられる。
以上の考察より,試料への機械的振動場で応答するひずみの振幅および位相の位置依存性の評価を,任意の場所で複数の結晶方位で行うことができた。振動発電デバイスにおけるシミュレーションの手法により,試料および磁石の配置を考慮したデバイスの発電量の評価が可能となった。さらに試料の磁区観察により,微視的な見地から試料の磁気的特性の評価が行えるようになった。以上の解析手法を相互的に組み合わせることにより,試料の微視的レベルから試料・磁石等の位置といった巨視的なレベルまでの一貫した振動発電デバイスの設計指針を得ることができたため,より高効率な発電デバイスの開発が期待される。
本研究は,科学技術振興機構・戦略的創造研究推進事業,科学研究費補助金(21K04707,22K04733,23H05183),第31回鉄鋼研究振興助成,宮城県産業技術総合センター,山梨県産業技術センターなどの支援により行われたものである。また,健全な研究を推進している東北大学産学連携機構の皆様などにも支援をいただいた。磁歪や磁区の考え方について,著者の一人(S.S)と議論いただいたH. Kronmüller教授(Max-Planck Institute for Intelligent Systems)に感謝申し上げます。また,議論でコメント等を頂いた東北大学の杉山和正教授,石山和志教授,志村玲子准教授,東北学院大学の枦修一郎教授,および試料を提供いただいた福田結晶技術研究所の福田承生社長(東北大学名誉教授),熊谷毅特別研究員などの皆様にも篤くお礼申し上げます。