In this study, we developed a new transport-assistant robot with tracking and autonomous driving functions. The purposes of this study are 1) to evaluate labor savings and 2) to evaluate the economic efficiency of the robot in a mandarin orchard. The results of the labor-saving effects were as follows: the time required for fertilizer application, herbicide application, and harvesting and transport with the introduction of the robot was reduced when compared to the conventional method. The results of the economic evaluation of nine people in a mandarin orchard are follows: 1) In the “labor-saving model,” which estimates the effect of reduced work hours, the income of the “labor-saving model” was not significantly different from the conventional model; and 2) in the “farmland expansion model,” in which farmland is expanded to the limit the work hours of nine people, the income of the farmland expansion model was higher than in the conventional model.
静岡県の主要農産物であるミカンの産出額は202億円(令和2年度)であり,「三ヶ日みかん」等のブランド産地が知られている.一方で,県内の多くのミカン園は中山間地域の傾斜地に位置しており,運搬等の作業は農業者への身体負担が大きい.作業別では,肥料散布は背負型の肥料散布器に肥料を補充し,散布器を背負い,歩きながら肥料を散布するため,身体への負担は大きい(表1).除草剤散布も,動力噴霧機を用いた手作業での散布であり,長いホースの巻き取り,繰り出しを行いながら園地の樹列間を移動するため,身体への負担は大きい.また,ミカンをコンテナに収穫し,コンテナを運搬する作業は作業時間全体の半分近くを占める.このような身体負担を軽労化し,作業時間を省力化するための機械開発が期待されているが,樹園地の基盤整備が進んでいないため,他の作物に比べ機械開発は遅れている状況にある(静岡県経済産業部農業局農芸振興課,2022).
ウンシュウミカンの作業時間と労働強度
| 作業 | 作業時間1)(時間/10a) | 労働強度2) |
|---|---|---|
| せん定 | 12 | ― |
| 薬剤散布 | 23 | 強 |
| 摘果 | 22 | 軽 |
| 肥料散布 | 7 | 強 |
| 除草 | 9 | 強 |
| 収穫・運搬 | 80 | 軽 |
| 貯蔵・出荷 | 30 | ― |
| その他管理 | 14 | ― |
| 合計 | 197 | ― |
このような背景に対し,静岡県農林技術研究所は,ミカン園等の樹園地における傾斜地での管理作業の省力化を目的に,運搬補助ロボットを自動車部品製造メーカと共同開発した(以下,「運搬補助ロボット」と称す).また近年,果樹経営での省力化を目的に,管理作業の一部を無人化するロボットが開発されており,農林水産省・農業・食品産業技術総合研究機構(2022)のスマート農業実証プロジェクトにおいて,果樹園を対象としたロボットを導入した実証試験が実施されている.農業分野でのロボットの開発,実証試験の取り組みは始まったばかりであり,ロボット導入による管理作業の省力化や導入コストに対する経済性まで評価した研究事例は少ない.先行研究として,徳田(2019,2021)は,果樹園を対象に無人走行の自動走行車を導入した際の経営的効果を明らかにし,開発技術に対応した経営規模の拡大及び園地整備を経営的な課題としている.ミカン経営では,自動走行車が作業できる樹形への改植が必要となるが,経済的負担を抑えながら改植すると,10年以上の改植期間を要する.しかし,果樹経営体の基幹的農業従事者の平均年齢は68.0歳(2020年農林業センサス)と高齢化が進んでおり,営農継続のためにも早期のロボット導入を図る必要がある.
そこで本研究では,ミカン作経営で,現在の樹形で運搬補助ロボットの利用ができ,作業負担も大きい肥料散布,除草剤散布,収穫運搬を対象に,現地実証試験を実施し,作業時間の省力化や作業負担の軽労化及び経済性を評価することで,本ロボットの導入可能性を検討する.
運搬補助ロボットの寸法は,機体寸法:幅95cm×長さ110cm×高さ40cmと小型で,旋回半径108 cmと小さく,樹園地内の走行が容易である1.4輪全てに駆動モータが装備され,20度程度の急傾斜地や凸凹の悪路でも走行が可能であり,積載量200 kgまで運搬が可能である.また,この運搬補助ロボットは自動追従機能と自律走行機能を有している.自動追従機能を使用する際は,事前にロボットのセンサに,作業者を認識させる.認識した作業者以外は検知せず,第三者が作業者の近くを並走したり,直前を横切ったりしても,最初に認識した作業者をセンサで検知し,その者との距離に応じて発進と停止を行う.追従走行中に曲がりきれないと判断した場合は,自動で前後進・切り返しを行って追従する.他方,自律走行機能は三次元レーザ測域センサによるSLAM技術2によって,進路上にある障害物の検知と回避を行いながら,任意に指定した移動地点まで自律走行する.
以上の運搬補助ロボットの特徴を述べてきたが,果樹作経営に対応する他のスマート農業技術(農林水産省・農業・食品産業技術総合研究機構,2022)で取り組まれているドローン(生育診断,防除),ロボット草刈機,アシストスーツ等と比べると,様々な作業の補助に導入できる可能性があること,傾斜や悪路に強く汎用性が高いことが特徴である.
(2) 運搬補助ロボット現地実証試験概要運搬補助ロボットを導入した現地実証試験を,静岡県浜松市三ヶ日地区のミカン作経営体3軒(A経営体,B経営体,C経営体)のほ場で,肥料散布,除草剤散布,収穫運搬の作業で実施する(表2).なお,経営体3軒とも実証ほ場の樹形は,慣行の開心自然形である.
運搬補助ロボット現地実証試験概要
| 試験内容 | 実証経営体(実証面積) | 作業人数 | ロボット走行方法 | 運搬物,運搬量 | 慣行作業の手順 | 実施時期 |
|---|---|---|---|---|---|---|
| 肥料散布 | A経営体(試験区20a,慣行区12a) | 1人 | 追従走行 | 肥料,肥料6袋 | ①肥料散布 ②肥料切れ,ほ場脇のトラックへ移動 ③肥料の補填 ④肥料散布途中の樹へ戻る,散布再開 |
2020年11月 2021年4月 2021年10月 |
| 除草剤散布 | B経営体(試験区12a,慣行区11a) | 1人 | 追従走行 | 動力噴霧機・農薬タンク,薬液150L | ①除草剤散布 ②1列散布終了後,同じ通路を戻り,ホース巻き取り・繰り出し ③ホースリールを積んだトラックと樹列の距離が離れた際,トラックの移動 ④次の通路に移動,除草剤散布 |
2020年10月 2021年8月 2021年10月 |
| 収穫運搬 | A経営体,C経営体(試験区18a,慣行区25a) | A経営体13~19人C経営体10人 | 自律走行 | 収穫コンテナ,収穫物20kg/ケース×8ケース | ①収穫作業中のミカン樹でコンテナ積載 ②動力運搬車でほ場脇のトラックへ運搬 ③コンテナの積み下ろし ④収穫作業中のミカン樹へ戻る |
2021年12月 |
1)下線の作業は,運搬補助ロボット導入により省力化される作業を示す.
2)収穫運搬作業では,1人が収穫コンテナの運搬を行い,他の作業者はミカンの収穫を行った.
3)収穫運搬作業で,慣行区のコンテナ運搬量について,A経営体は作業の進捗によって10ケース及び20ケース運搬可能な運搬車を選択し,使用した.C経営体のコンテナ運搬量は8ケースであった.
実証試験では,各作業の作業時間を計測する他,作業負担の軽労化を評価する一指標として,作業者の移動距離の削減を分析する3.肥料散布,収穫運搬作業は,運搬補助ロボット導入により,作業工程が変わり,移動距離が削減されるため,移動距離を測定する.肥料散布では作業者,収穫運搬では作業者及び運搬ロボットのフレームにGPSロガー(GARMIN社製eTrex 32x,測位誤差3m)を取り付け,10秒間隔で緯度,経度,移動距離を計測する.
各作業の手順について,肥料散布試験では,作業者が肥料散布機により株元への散布を行う.試験区では,運搬補助ロボットの作業者追従走行機能を使用し,肥料の運搬補助を行う.肥料は予め散布量6袋をロボットに積載する.作業者は肥料散布を行い,ロボットは常時,作業者を追従する.肥料散布機内の肥料が無くなった際,ロボットに積載された肥料から,肥料散布機に補充して散布を再開する(図1).一方,慣行区は①肥料散布を行い,②肥料散布機の肥料が空になる度に,ほ場隅に停めたトラックまで移動し,③肥料補充を行った後,④肥料散布途中の地点まで戻り,散布を再開する(表2).①~④の1工程の作業時間は概ね3~5分程度であるが,試験区は,ロボット導入により②,④の工程が省力化される.また肥料散布中のミカン樹からトラックまでの1回の移動距離は最大で100m程度省力化される.

運搬補助ロボットの作業者追従機能を利用した肥料散布
除草剤散布試験では,動力噴霧機による手散布で,散布量100L/10aとし,樹列間通路を歩行しながら通路と樹冠下部分に散布する.試験区は動力噴霧機と薬液タンクをロボットに積載し,ロボットは散布作業者を追従走行する(図2).一方,慣行区はトラック荷台上に動力噴霧機と薬液タンク,ホースリールを固定し,トラックを園内枕地に停める.①往路は作業者がホースを引きながら散布し,②復路は往路を戻った後にホースを巻き取る.③ホースリールと除草する樹列との距離が大きく離れた際は,トラックを移動し,④次の樹列間に移動し除草する(表2).①~④の1工程の作業時間は,50m~60mの樹列に対し,概ね20~30分程度であるが,試験区は,ロボット導入により②,③の工程が省力化される.

運搬補助ロボットの作業者追従走行を利用した除草剤散布
収穫運搬試験では,ミカンの収穫作業と収穫樹からトラックまでの収穫コンテナ運搬作業を実施する.試験区は,収穫作業を担当する臨時雇用がミカンをコンテナに収穫し,運搬担当者がロボットにコンテナを8ケース積載する.コンテナを積載したロボットは,ほ場脇にあるトラックまで自律走行する(図3).トラックで別の作業者がコンテナを積み下ろした後,ロボットは臨時雇用が収穫作業している樹まで,自律走行する.一方,慣行区は,運搬作業を運搬作業者が動力付クローラ運搬車を用い,①収穫作業中のミカン樹でコンテナを運搬車に積載し,②運搬車を用い,ほ場脇のトラックへまで運搬する.③トラックでコンテナの積み下ろし,④収穫作業中のミカン樹へ戻る(表2).①~④の1工程の作業時間は,コテンナ8ケースの積載,50m~250mの運搬距離で,概ね5~10分程度であるが,試験区は,ロボット導入により②,④の工程が省力化され,収穫中のミカン樹からトラックまでの移動距離で最大250m程度省力化される.
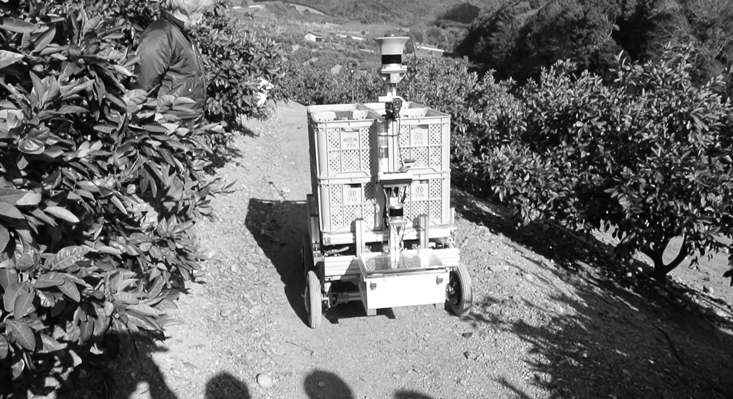
運搬補助ロボットの自律走行による収穫コンテナ運搬
肥料散布試験について,運搬補助ロボットを用いることで,作業者は肥料補填のためのトラックまで移動が省力化され,試験区の作業時間は慣行区と比較して最大で9.5%削減した(表3).その際の作業者の移動距離は試験区400m/10a,慣行区607m/10 aであり,慣行区よりも35%削減された(表4).
運搬補助ロボットを利用した肥料散布時間
| 実施時期 | 2020/11 | 2021/4 | 2021/10 |
|---|---|---|---|
| 試験区(分/10a) | 18.8(3.6%)1) | 16.3(9.5%) | 17.9(0.6%) |
| 慣行区(分/10a) | 19.5 | 18.0 | 18.0 |
1)慣行区に対する試験区の削減率を示す.
肥料散布作業での歩行距離(2021/4試験)
| 合計(m/10a) | 内訳 | |||
|---|---|---|---|---|
| 肥料散布 | 肥料補填の往復 | その他(樹列間,農道) | ||
| 試験区 | 400 | 212 | ― | 188 |
| 慣行区 | 607 | 205 | 215 | 188 |
除草剤散布試験について,試験区は運搬補助ロボットが自動追従することで,ホースの繰り出し・巻き取り作業が無くなり,散布時間は慣行区と比較して最大で45%削減した(表5).
運搬補助ロボットを利用した除草剤散布時間
| 実施時期 | 2020/10 | 2021/4 | 2021/10 |
|---|---|---|---|
| 試験区(分/10a) | 53.1(32.6%)1) | 48.5(34.3%) | 46.0(45.0%) |
| 慣行区(分/10a) | 78.7 | 73.8 | 83.5 |
1)慣行区に対する試験区の削減率を示す.
収穫運搬試験について,試験区と慣行区間でミカンの単収が異なり,同一面積下で運搬する収穫コンテナ数に差があったため,収穫物1t当りの収穫運搬時間で作業時間を評価した.A経営体の収穫物1t当りの収穫運搬時間は,試験区13.4時間/t,慣行区13.7時間/tで同等であった(表6).一方,C経営体の収穫物1t当りの収穫運搬時間は,試験区13.6時間/tで,慣行区14.6時間/tより6.9%削減された.また,ミカンを収穫し,ロボットにコンテナを積載する時間は,ロボットがトラック間を往復で運搬する時間よりも長く,ロボットに待ち時間が発生した.なお,C経営体の運搬作業者の移動距離は試験区2.8 km/10aで,慣行区8.2km/10aより66%削減された(表7).
運搬補助ロボットを利用した収穫運搬時間
| 収穫物1t当り収穫運搬時間(時間/t) | 10a当り収穫運搬時間(時間/10a) | 単収(t/10a) | |
|---|---|---|---|
| A経営体 | |||
| 試験区 | 13.4(2.2%)1) | 40.0 | 3.0 |
| 慣行区 | 13.7 | 54.5 | 4.0 |
| C経営体 | |||
| 試験区 | 13.6(6.9%)1) | 39.8 | 2.9 |
| 慣行区 | 14.6 | 39.9 | 2.7 |
1)慣行区に対する試験区の削減率を示す.
収穫運搬作業の移動距離(C経営体)
| 運搬作業者(km/10a) | ロボット・慣行運搬車(km/10a) | |
|---|---|---|
| 試験区 | 2.8 | 6.3 |
| 慣行区 | 8.2 | 3.1 |
実証試験の結果を元に,運搬補助ロボットを導入した際の経済性について,線形計画法(XLP4)を用い経営モデルを試算する.試算の基準とするミカン作経営体として,実証試験を実施したミカン経営体の経営規模に準じ,ミカン経営面積3.0ha,労働力9人,共販出荷の個人経営体を想定する(表8).目的関数は,作型別ミカンの組み合わせによる所得の最大化とする.始めに,慣行作業で,労働力の作業可能時間の上限まで規模拡大する「慣行モデル」を試算する.次に,経営体が肥料散布,除草剤散布,収穫運搬の管理作業に運搬補助ロボットを導入するモデルを試算する.ロボット導入モデルのうち,慣行モデルと同じ面積でロボットを導入し,作業時間の削減効果を試算する「省力化モデル」と労働力の作業可能時間の上限まで規模拡大を図る「規模拡大モデル」を試算する.試算における制約条件として,月旬別の労働力の作業時間,早生,中生,晩生の作型別の面積比率5を設定する.また,「省力化モデル」は「慣行モデル」と同面積となるよう設定する.なおロボットの作業時間は,実証試験で削減率が最も高かった作業時間とする.
運搬補助ロボットを導入したミカン経営モデル試算概要
| 試算目的 | ミカン経営面積3.0ha,労働力9人,共販出荷,個人経営体を想定し,肥料散布,除草剤散布,収穫運搬作業に運搬補助ロボットを導入した経営モデルを試算する. |
| 目的関数 | 作型別ミカンの組み合わせによる所得の最大化 |
| 試算経営モデル | 慣行モデル:慣行作業で,労働力の作業可能時間の上限まで規模拡大する経営モデルを試算する. |
| 省力化モデル:慣行モデルと同面積で,ロボット導入により作業時間が削減された経営モデルを試算する. | |
| 規模拡大モデル:ロボット導入により削減された時間は,労働力の作業可能時間の上限まで規模拡大する経営モデルを試算する. | |
| 作型プロセス | 早生:11月上旬~11月下旬収穫の旬別3プロセス,中生:11月中旬~12月上旬収穫の旬別3プロセス,晩生:12月中旬~12月下旬収穫の旬別2プロセス |
| 単収・単価 | 早生,中生,晩生とも4.0t/10a・早生244円/kg,中生272円/kg,晩生285円/kg |
| 労働力・1日作業時間 | 家族労働力2人,常時雇用1人,臨時雇用最大6人以内・作業時間係数×8時間 |
| ロボット作業体系 | 肥料散布 作業時間:ロボット導入16.3分/10a,慣行18.8分/10a |
| 作業時期:3月中旬,6月中旬,11月上旬の計3回 | |
| 除草剤散布 作業時間:ロボット導入46.0分/10a,慣行83.5分/10a | |
| 作業時期:4月中旬,6月上旬,8月上旬,10月中旬の計4回 | |
| 収穫運搬 作業時間:ロボット導入54.4時間/10a,慣行58.4時間/10a | |
| 作業時期:11月上旬~12月下旬 | |
| 単体表制約条件 | 労働力制約:1月~12月の旬別最大作業時間>家族作業時間+雇用作業時間 省力化モデル面積制約:省力化モデル面積=慣行モデル面積 作型制約:作型別の面積比率を,早生:中生:晩生=1:1:3とする. |
1)経費やロボット以外の作業時間は,静岡県の標準的なミカン経営指標である静岡県技術原単位(2016年)を用いる.
2)単価は東京都中央卸売市場統計情報(令和2年)を用いる.
3)本ロボットは市販化されていないが,開発メーカと部材費等ふまえ協議した結果,販売価格を200万円に設定した.慣行の動力付運搬車を50万円とし,減価償却費(償却年数7年),修繕費(取得価格の3%)に計上する.常時雇用は固定給282万円とし,臨時雇用は960円/時間で試算する.
4)作業時間係数は,気象庁統計(2015~2019年)の三ヶ日地区1時間降水量より0.5mm未満=1,0.5~9mm=0.5,10mm以上=0とする.
線形計画法を用いた試算から,慣行モデルは,面積3.68ha,粗収益3,334万円,所得842万円と試算された.規模拡大の制限要因として,11~12月中の収穫運搬と貯蔵・出荷の作業が多く,労働力9人での作業可能時間の上限に達していた.
運搬補助ロボットを導入した省力化モデルは,面積3.68ha,粗収益3,334万円,所得832万円と試算された(表9).作業内容ごとの時間について,全作業時間の中で多くの割合を占める収穫運搬は,ロボットを導入することで2,000時間となり,慣行の2,147時間より減少した.肥料散布,除草剤散布の作業時間も,ロボットを導入することで慣行の作業時間より減少した.雇用形態別の作業時間では,収穫運搬の作業時間が減ることで,臨時雇用の全体の作業時間は2,953時間となり,慣行の3,106時間より減少し,雇用費は565万円となり,慣行の580万円より減少した.しかし,ロボットの減価償却費,修繕費の経費が増加することで,所得は832万円となり,慣行の842万円よりも減少した.
運搬補助ロボット導入経営モデル
| 経営モデル | ロボット導入 | 慣行 | |
|---|---|---|---|
| 省力化 | 規模拡大 | ||
| 面積(ha) | 3.68 | 3.98 | 3.68 |
| 早生 | 0.74 | 0.80 | 0.74 |
| 中生 | 0.74 | 0.80 | 0.74 |
| 晩生 | 2.20 | 2.38 | 2.20 |
| 粗収益(万円) | 3,334 | 3,615 | 3,334 |
| 経費(万円) | 2,502 | 2,684 | 2,492 |
| 肥料費 | 147 | 159 | 147 |
| 農薬費 | 263 | 285 | 263 |
| 雇用費 | |||
| 常時雇用 | 282 | 282 | 282 |
| 臨時雇用 | 283 | 326 | 298 |
| その他生産費 | 260 | 282 | 260 |
| 出荷経費 | 695 | 753 | 695 |
| 減価償却費 | |||
| ロボット・運搬車 | 28 | 28 | 7 |
| その他減価償却 | 260 | 260 | 260 |
| 修繕費 | 53 | 53 | 49 |
| その他経費 | 231 | 256 | 231 |
| 所得(万円) | 832 | 931 | 842 |
| 全作業時間(時間) | 7,573 | 8,199 | 7,779 |
| 作業内容 | |||
| 肥料散布 | 30 | 32 | 35 |
| 除草剤散布 | 113 | 122 | 205 |
| 収穫運搬 | 2,000 | 2,168 | 2,147 |
| その他作業 | 5,430 | 5,876 | 5,393 |
| 雇用形態 | |||
| 家族,常時雇用 | 4,620 | 4,793 | 4,673 |
| 臨時雇用 | 2,953 | 3,406 | 3,106 |
また,規模拡大モデルは,面積3.98ha,粗収益3,615万円,所得931万円と試算された.規模拡大の制限要因であった収穫運搬時間が,ロボット導入により省力化することで,規模拡大が可能となり,作型別面積は早生0.80ha,中生0.80ha,晩生2.38 haまで増加し,面積全体で3.98haとなった.所得は931万円まで増加し,慣行の所得842万円より増加した.以上から,労働力9人のミカン作経営体が運搬補助ロボットを導入する際,慣行の面積のままで,作業時間が省力化されるだけでは,慣行よりも所得は増加しなかった.慣行よりも所得を増加するためには,規模拡大を図ることが必要である.
(3) 考察徳田(2019)による自動走行車の先行研究と本研究の結果を比較すると(表10),自動走行車は運搬補助ロボットよりも,導入価格は高いものの,対応可能な作業が多く,作業時間の削減率も総じて高い.その結果,自動走行車で規模拡大した際の面積拡大率も高くなり,自動走行車の方が運搬補助ロボットよりも導入しやすいと示唆される.以上の運搬補助ロボットの導入の限界もふまえ,以下では規模拡大の観点から運搬補助ロボットの導入意義を検討する.徳田(2019)は,現在の果樹経営において経営体数と栽培面積が減少しており,今後,栽培面積を維持するためには,残された経営体が自動走行車を導入し,規模拡大に対応する必要があると報告している.また,徳田(2021)は自動走行車の導入には樹園地の改植が必要となるが(表10),経済的負担を抑えながら改植すると,10年以上の改植期間を要すると試算している.そのため,規模拡大を志向するミカン経営体は,長期的な改植を通じて自動走行車に適応可能な樹園地を整備する一方で,改植期間中においては,運搬補助ロボットを既存の樹園地に導入し,肥料散布や除草剤散布,収穫運搬の作業を省力化していく経営戦略が示唆される.運搬補助ロボットの省力効果は限定的であるが,早期から省力化を図っていくことが可能である.
ミカン経営での運搬補助ロボット及び自動走行車(徳田,2019)試験結果概要
| 試験機 | 想定導入価格(万円) | 試験機作業内容(作業時間削減率)1) | 試験機導入による拡大可能面積 | 樹園地の改植作業 |
|---|---|---|---|---|
| 運搬補助ロボット | 200 | 肥料散布(9%)2),除草剤散布2)(45%),収穫運搬(6%) | 3.98ha(慣行の1.08倍) | 不要 |
| 自動走行車 | 550 | 防除(90%),除草(83%),収穫運搬(30%),整枝・せん定(50%) | 3.59ha(慣行の1.39倍) | 長期的な園地の改植が必要 |
1)慣行区に対する試験区の作業時間の削減率を示す.
2)ロボットの追従走行を利用し作業した.他の作業は自動走行を利用し作業した.
また,運搬補助ロボットの規模拡大や省力化効果の根拠となっている運搬補助ロボット導入経営モデルについて,ミカン経営体への適用可能性についても考察する.本経営モデルは,労働力9人,面積3 ha規模をベースとした経営指標(静岡県経済産業部農業局農業戦略課,2016)を元に試算しており,全ての経営規模のミカン経営体に本経営モデルを適用することは難しい.さらに,運搬補助ロボットによる作業時間も,1~2件のミカン経営体の実証試験結果に基づくもので,経営体ごとの作業条件や園地条件によって,作業時間が異なることが想定され,本経営モデルの適用は限定的なものである.経営モデルについては,今後も様々なミカン経営体で運搬補助ロボット実証試験を継続し,経営規模や樹園地条件に適した経営モデルを試算,提示していく.
本研究では,運搬補助ロボットを慣行の樹形におけるミカン経営の肥料散布,除草剤散布,収穫運搬に導入することで,作業時間は慣行よりも省力化された.また,肥料散布,収穫運搬での移動距離は削減され作業負担の軽労化が図られた.経済性評価では,ロボット導入により省力化された時間を,規模拡大に充てることで,所得は慣行よりも増加した.
本ロボットの導入意義について,規模拡大を志向するミカン経営体にとって,先行研究で報告された自動走行車は,作業時間の削減効果が高いが,導入には樹園地の長期的な改植が必要となる.よって改植期間中に本ロボットを既存の樹園地に導入することで,早期に省力化を図っていくことが可能となる.
本研究の内容は,農林水産省「スマート農業技術の開発・実証プロジェクト(課題番号:果2C02),課題名:中山間地におけるみかん経営の収益向上及び省力スマート生産技術体系の実証」(事業主体:国立研究開発法人農業・食品産業技術総合研究機構)の支援により実施した.