講演
JARIシンポジウム基調講演2:自動運転レベル4の実用化に向けた取り組み
2024 年 2024 巻 4 号 論文ID: JRJ20240404
詳細
2024 年 2024 巻 4 号 論文ID: JRJ20240404
本稿は,交通社会の課題解決が期待されている自動運転レベル4実現に向けた制度整備の状況や今後の課題,ホンダが進める自動運転タクシーサービスの実用化に向けた取り組みを概説する.
1. Hondaの安全理念と交通事故ゼロに向けた取り組み
ホンダは,創業者である本田宗一郎の安全に対する想いとして「人命尊重」と「積極安全」を受け継いできた.それは,危険だから乗らないとか運転しないのではなく,安全に対して積極的に取り組み,社会を変えていくという姿勢である.
図1 ホンダは,「道を使う誰もが安全でいられる事故に遭わない社会をつくりたい」という安全理念のもと,Safety for Everyoneというスローガンを掲げ,さまざまな取り組みを進めている.そして環境・安全ビジョンとして,交通事故死者ゼロ,この先にある「自由な移動の喜び」と「豊かで持続可能な社会」の実現,これを目指していきたいという考えである.

図2 この考えのもと,「2050年 全世界において Hondaの二輪・四輪が関与する交通事故死者ゼロ」にするということを目指してゆくことを2021年4月に発表した.この目標は,新興国を含めた全世界で,新車だけではなく,すでに市場に存在する全てのホンダ車および相手歩行者・自転車をも対象とする非常にチャレンジングな目標となっている.

図3 この目標達成に向けて,中間のマイルストーンである2030年「交通事故死者半減」をHonda SENEING,安全運転支援および自動運転技術の進化と普及で達成し,2050年に向けては,一人ひとりに合わせた安心を提供する運転時のヒューマンエラーゼロを目指す「知能化運転支援技術」とすべての交通参加者との共存を可能にする人・モビリティ・インフラが通信でつながることで,多様なリスクを回避する「安全・安心ネットワーク技術」を開発すること等が必要になると想定している.

図4 は,安全運転支援および自動運転技術のロードマップを示している.このロードマップは,交通事故ゼロ社会実現に向けて,上から「自動運転」,「運転負荷の軽減」,「事故を回避する技術」,そして「駐車支援や自動駐車」という四つの方向性に必要な技術を進化させてゆくことを示している.その中で,2021年には高速道路渋滞時自動運転レベル3を世界初で実現したHonda SENSING Eliteを発売し,さらにその技術を活用し,普及させた,Honda SENSING 360も発売している.2024年には運転支援機能を拡大させたHonda SENSING 360プラスの発売も控えている.

図5 ホンダの安全運転支援および自動運転技術の製品パッケージは主に三つのピラーで構成されている.ベースとなるHonda SENSINGは2030年までに,二輪車の検知機能を加えて,全世界の四輪全機種に展開の展開を目指している.Honda SENSING 360に関しては,自動運転レベル3の実用化で培った技術を活かした機能に加え,より高度な安全運転支援の技術が拡充されていき,今後はこの製品パッケージがホンダの安全運転支援・自動運転の標準的パッケージとなっていくと考えている.Honda SENSING Eliteは自動運転の機能を含む製品パッケージとなり,独自のAIを活用した認知・理解技術により自宅から目的地まで一般道も含めたシームレスな移動を支援することを目指している.

図6 こういった技術ロードマップを達成する上で一番重要な技術はAI,人工知能であり,特に一般道という非常に複雑なシーンでパーソナルカーに向けて高度な運転支援や自動運転の機能を提供するということを考えると,複雑化した環境下で走行シーンを認知・理解し,安全に,シームレスに移動を支援するためには不可欠であると考えている.
ホンダはこの領域に独自のAIを用いて対応することを目指し技術開発を進めている.

図7 自動運転の技術はパーソナルカーとしての進化が進んでいる一方で,サービスカーいわゆる無人の移動サービスの技術進化はパーソナルカーとは異なる進化を遂げることになると考えられている.パーソナルカーが,広範囲な移動に対して対応するのに対してサービスカーの場合はある程度狭い範囲ではあるが,一般道を含む非常に複雑な走行シーンに対応するため,範囲は狭いものの,人の操作に頼らない,ドライバーが必要ないレベル4の技術求められることになる.

2. 自動運転による新たなモビリティに向けた制度整備
図8 運転支援・自動運転の技術の進化により将来のモビリティには様々な効果や価値がもたらされることが予想される.利用者の生活圏においては,移動サービスが実現し移動の効率や安全性が高まることが期待され,地域社会においては移動が困難な状況や,モノの移動の課題などが解決されることも予想される.また,世界的に求められるカーボンニュートラルへも貢献できるという効果もある.

図9 こういった期待に応えるため,日本は官民が連携した自動運転実現に向けた活動によりタイムリーな制度整備が実現し,道路交通法および道路運送車両法が改正され,自動運転レベル3およびレベル4の社会実装の準備を進めてきた.23年4月には 特定自動運行の許可制度が新設され,特定条件下での自動運転レベル4の運行が始まっている.これに合わせて道路運送法に関しても運輸規則が改定されるなど,日本は世界に先駆けて,自動運転レベル4の走行環境の整備が進んでいると言える.

図10 しかしながら,自動運転の共存する交通社会という観点では 制度整備の余地が残されているのも事実であり,自動運転の共存する社会の交通の安全と円滑は道を使うすべての参加者の相互の作用・努力によって実現するのが合理的ではないかと考えられる.つまり,自動運転がどうすべきか?だけでなく,公共インフラや周辺交通参加者がどうあるべきか?も整備してゆかないと真の交通の安全と円滑は達成されないのではないか?ということである.その観点で,レベル4を実現するための切り札と思えるのが 公共インフラの整備や交通ルールの徹底などの行動変容を含む走行環境の整備でないだろうか.
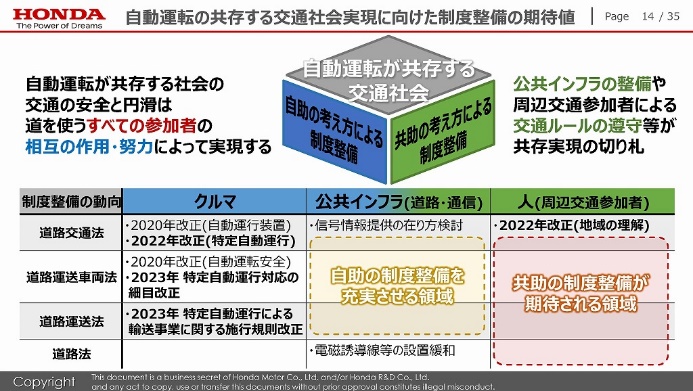
図11 自助の制度整備を充実させる必要のある項目と共助の制度整備が期待される項目がそれぞれあり,さらなる取り組みが期待される.

図12 前述の様な,自動運転移動サービスの社会実装を目指した制度整備の課題を,三位一体すなわち人と車と交通環境の視点で整理したものがここで示されており,自工会の次世代のモビリティ実装に向けた自動運転TFという取り組みの中で整理されている.特に赤字の部分に関しては官民連携でさらなる推進を強めてゆきたい項目となる.

3. 自動運転の安全性と社会実装における課題
車両の中に運転手の存在を前提としない自動運転移動サービスの実現に向けてはその安全性を担保してゆくことが重要な課題となる.
図13 自動運転が安全である,すなわち事故を起こさない.とはどういうことかと言うと
合理的に予見可能で防止可能な人身事故は起こさない.これを段階的に示すことになる.
まず,実環境データーを用い事故の可能性があり得る範囲を予見可能性として定め,次に予見可能な範囲の中で論理的に事故に至る場合と回避できる場合の境界線を導き出す.最後にこの境界線に於いて,自動運転が有能で注意深いドライバーよりも優れていることを実機およびシミュレーションなどにより示すこととなる.

図14 ホンダが21年発売した,トラフィックジャムパイロットという自動運転機能において高速道路上での人身事故の形態を分類し,安全性を検証した際の事例を概要として示すと以下のようになる.まず高速道路で50 km/h以下のある年の人身事故の統計を形態ごとに分類する.次にすべての分類されたケースが,事故を起こさないために定めた対応のどれかに必ず当てはまることを確認し,最終的に代表的な事項として,「人を見つけたら確実に自動運転を終了する」,「割込み車両にはドライバー同等以上の回避性能であること」,「工事区間に遭遇したら適切に検出すること」などを実車およびシミュレーションを用いて検証することで安全性が明らかとなる.

図15 ここに自工会にてJARI(一般財団法人 日本自動車研究所)協力も得ながら検討した一般道での安全性検証シナリオの類型化の事例を示す.高速道路上での自動運転の場合,配慮すべきシナリオは24パターン程度だが,自動運転タクシーなどが走行する一般道の場合は相手が四輪車の場合に限ったとしても58シナリオあり,相互作用のパラメータの組み合わせを考えると,相当数の検証が必要となる.また,このシナリオは一対一のケースに限定されるため,1対多のケースや車対人などのケースを考えると検証対象は指数関数的に増えてゆき,いわゆる シナリオ爆発という事態に直面することが予想される.
そのため,実際に一般道での自動運転の安全性を検証する際には,シナリオを類型化しつつ検証の範囲を有限にして行くことが非常に重要となることが予想される.

図16 安全性を論証するための対象となる範囲や達成基準が整理されたとしても,図に示されるようにジレンマ問題を検討してゆくことがさらに求められる.自動運転車には乗客が乗車しており,飛び出すことが予想される歩行者とどちらを優先すべきか,また,人命を優先して対向車に向かって車線をまたぐべきか.後続車に配慮せず急停車をして良いか.等,安全性やリスク低減という物差しだけでは解決できないケースが数多くある.このようなケースの解決にあたっては社会と対話しどう解決すべきかの合意形成を獲得することが不可欠である.
この解決の糸口として国際標準の世界では既に自動運転に関する倫理的な配慮事項の検討が始まっている.ここでは一部の情報を示すにとどめるが,配慮すべき価値観や原理などが議論されている.今後,自動運転に限らずAIなどの普及によりシステムが自律して機能することが増えてくると,ELSI(倫理,法律,社会)を包括した検討対応が必要になってくることが想定される.
このように,自動運転レベル4の実現にはまだまだ取り組まなければならない事柄が多くあり,引き続き官民連携しながら対応してゆくことが期待されている.

図17 ここに自動運転レベル4の安全設計の方針と倫理的な配慮を含んだ課題考察の事例を紹介する.自動運転を設計する際に配慮すべき方針は,工学と倫理を表裏一体として捉えその両立を目指す.その際には設計根拠を明確にすること,説明可能とすることが重要となる.
前述のジレンマ状況を例にとると,いずれの配慮をしたとしても結果的に設計者だけでは最終的な結論を導き出せず,社会的な受容性を持つ評価基準の策定が無くては成立しないことが想定される.

図18 自動運転を,設計・製造する側だけでは決められない設計時の配慮事項に対して,デジタル庁は「AI時代における自動運転車の社会的ルールの検討SWG」という会議体を設置した.
ここでは事故時の責任の在り方など社会的な受容性の議論を含む検討が進められると予想されることから,自工会からはこの図に示すような内容を報告している.
この報告では,人と車とインフラの三位一体により自動運転の安全を担保する場合にはその機能の分担や責任分解の明確化が重要であり,社会実装後に顕在化する事故の場合には様々なケースが考え得ること,特に注意が必要なのは,システムに瑕疵・欠陥が,運用者には過失がないにもかかわらず,回避できずに事故に至るケースがあり,その場合の責任所在の明確化が必要であるという点が主な論点である.
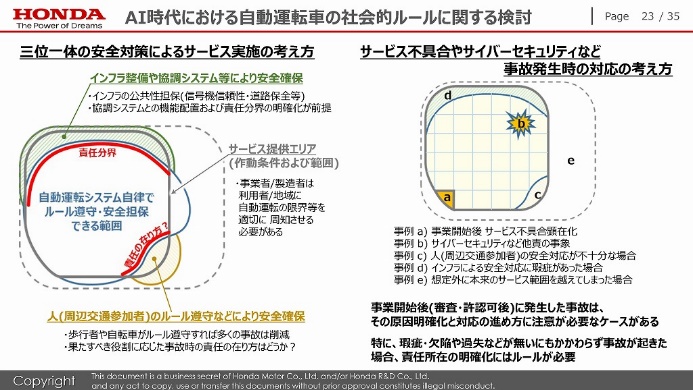
図19 自動運転レベル4の社会実装に向けた 制度整備の課題を整理すると,ここに示す3つの検討項目
・合理的に予見される事故ケースの有限(シナリオ類型化)と回避性能の判断基準の明確化(テスト方法の共通化)
・予見可能の中には欠陥や過失がなくても回避困難で事故となってしまうケースの社会受容基準の策定
・予見困難な事故ケースが実際に起きた際の取り扱いの協議
これらに対して社会が受け入れられ,法的な整理が進む.ということが重要となる.

4. 自動運転タクシーサービス実現に向けた取り組み
ホンダの自動運転タクシーサービス実現に向けた取り組みを紹介する.
図20 ホンダは2023年10月19日に北米のクルーズ社,GM社と共同で自動運転タクシーサービスの提供を担う合弁会社の設置に向けた基本合意を締結したことを発表した.経済産業省および国土交通省は同日,自動運転移動サービスの早期実現に向けて事業者および関係省庁間での連携を促進する枠組みとなる「レベル4モビリティアクセラレーションコミッティ」の立ち上げを発表した.

図21 ホンダはこのコミッティと連携し,レベル4自動運転を用いて利用者の移動体験を向上させる新しいモビリティの実現を目指してゆく.コミッティではサービス実現に向けた実験を含む対応車両の情報を共有してゆく.まずは,小型の従来型車両で自動運転の技術の適合を進め事業開始にあたっては専用の車両 Originを用いる予定である.

図22 自動運転タクシーサービスの提供を予定しているエリアは,サービス開始当初は東京臨海部とし,その後段階的に中央区,千代田区,港区および江東区の一部とエリアを広サービス車両の台数は500台まで拡大を予定している.

図23 事業化までに必要となる自動運転の許認可の概要は表で示す通り.二つの車両を組合せながら段階的に進める予定である.

図24 無人の自動運転移動サービスが北米でどのように実施されているかの実例を紹介する.
車両には運転車や保安員といった関係者は乗車せず,完全に無人での走行が可能となっていることが確認できる.交差点では信号を自律的に認識し,対向車線の車両や横断歩道の歩行者のみならず,自転車や駐車車両も認識しスムーズな走行が可能となっていることがわかる.

図25 無人の自動運転技術を日本へも導入することを目指し,2022年12月より栃木県宇都宮・芳賀地区にて適合開発をスタートしている.東京などの他のエリアの検証も今後開始する予定である.
実証実験の内容は,高精度地図データの取得に始まり,日本特有の道路標識や路面標示,交通規制などへの対応や四季などの自然環境の変化への対応などがあげられる.

図26 ビデオでは実際の走行の状況が確認できる.国内では,まだ保安運転手が必要なレベルではあるがすでに基本的な走行は可能である.実証を重ねることで,北米と同様に無人での走行が可能となることを目指している.

図27 自動運転タクシーサービスの事業化にあたっての専用車両は,北米GM社のファクトリーゼロという工場で実際に生産ラインを通して製造した試作車がすでに無人で走行できる状態になっている.非常に新しい走行体験が得られる車両であり,これが近い将来,日本において社会実装されることを期待している.

5. おわりに
図28 ホンダは,社会課題解決に向け様々な技術に取り組んでおり,すべての交通参加者の移動リスクをゼロにすることで,「安全」のその先にある一人ひとりの「安心」を新たな価値として提供し,もっと行動したくなる,温かみのある未来を実現していきたいと考えている.
自動運転タクシーサービスもこの考えに元づく取り組みのひとつであり,ホンダのこれからの活動に理解と期待をいただきたい.
