Abstract
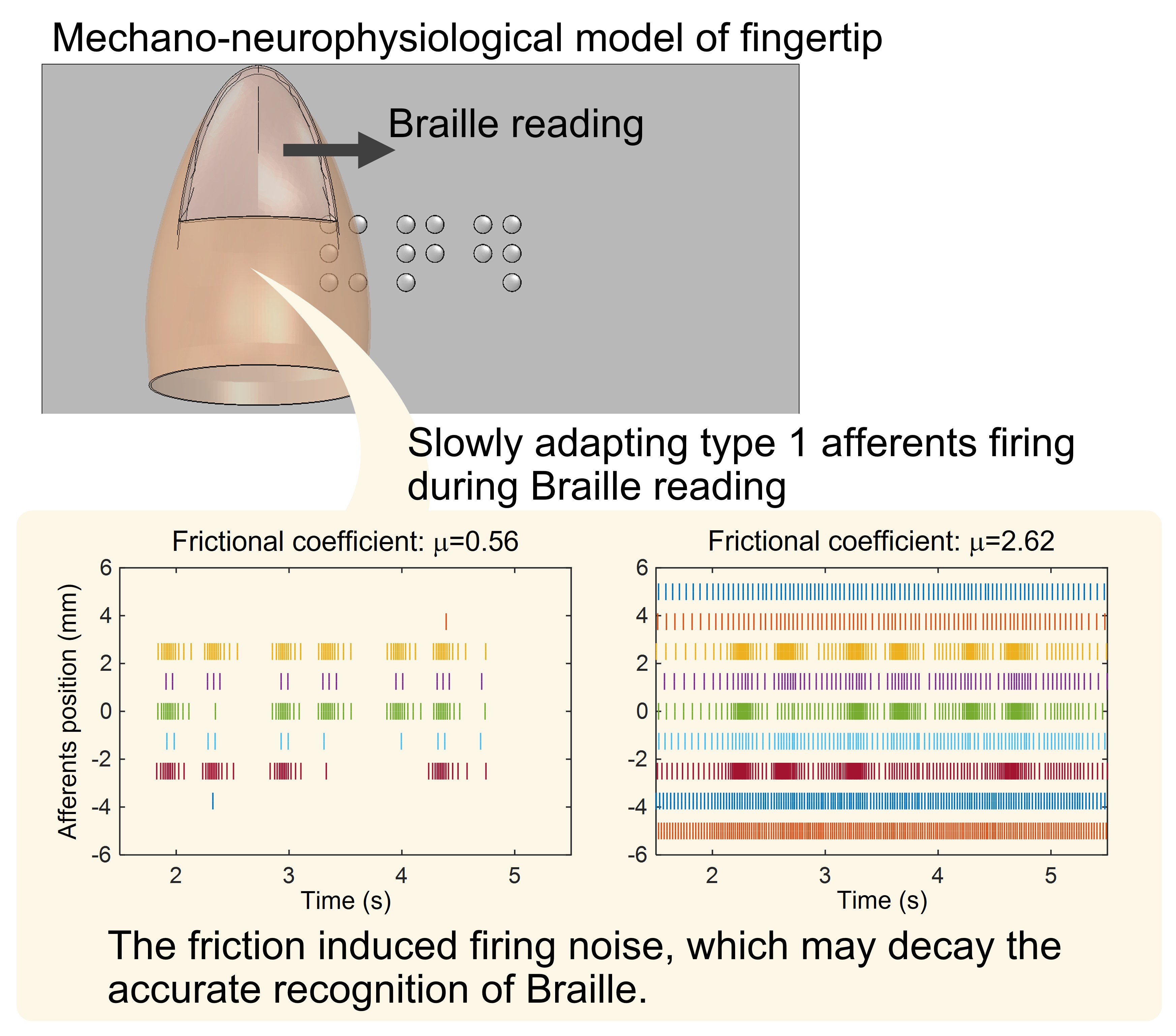
The evaluation of tactile sensitivity involving frictional behavior via computational models can further accelerate the development of industrial products in terms of usability. This study aimed to confirm the capability of a previously proposed mechano-neurophysiological model, representing the basic mechanical (i.e., finger skin deformation) and neurophysiological (i.e., neural activities of slowly adapting type-1 (SA1) afferents) functions in the tactile sensation process, for simulating tactile responses during Braille reading under multiple frictional conditions. A previous psychophysical experiment on tactile recognition during Braille reading reported that the misread rate was significantly higher at frictional coefficient (μ) = 2.62 than at μ = 0.56, whereas no significant differences were observed between the misread rates at μ = 0.25 and 0.77. The Braille reading experiment was simulated using the mechano-neurophysiological model to achieve the present aim. The simulation results revealed marginal differences in the SA1 responses between μ = 0.25 and 0.77, and the correlation coefficients between the SA1 responses and Braille patterns were 0.98 at μ = 0.25 and 0.96 at μ = 0.77, suggesting a limited influence of friction on Braille recognition. However, the SA1 responses varied considerably between μ = 0.56 and 2.62, and the correlation coefficients were 0.97 at μ = 0.56 and 0.49 at μ = 2.62, implying a relatively strong influence of friction. The simulation results supported the above-mentioned findings of the previous psychophysical experiment, thereby demonstrating that the mechano-neurophysiological model qualitatively determined the tendency of influence of friction on Braille recognition.