自動運転技術の開発動向と技術課題
2015 年 57 巻 11 号 p. 809-817
詳細
2015 年 57 巻 11 号 p. 809-817
現在,2020年までの自動運転の実用化を目指して日本,米国および欧州において技術開発が進められている。自動運転は人間に代わり認知,判断,操作を行う必要があり,高度な情報処理や走行制御が求められる。このため自動運転として,数台の車両が車群を構成して走行する隊列走行システムが開発された。この隊列走行システムを通じ,白線に沿って自動操舵する車線維持制御技術や車車間通信技術を用いた車間距離制御技術が開発された。隊列走行システムの後,現在一般道での自動運転を目指した技術開発が行われており,キー技術として,制御コンピューターの故障時における安全を確保するフェイルセーフ技術や障害物を確実に認識するためのローカルダイナミックマップ技術およびAI化を中心とした自動運転アーキテクチャーが開発されている。
安心・安全で環境にやさしいモビリティー社会の実現を目指して,路車間通信を利用した安全運転支援システムや自動運転車の開発等,自動車と情報通信との融合による新しい自動車交通システム開発の取り組みが進められている。特に自動運転車はドライバーの認知・判断・操作といった運転操作を補助する運転支援システムに代わる次世代のシステムとして期待されており,2020年までの実用化を目指し,日,米,欧で技術開発が進められている。
自動運転技術の開発をさかのぼれば,1975年ごろにコンピューター・ビジョン技術による自動運転の研究開発が行われたのを皮切りに,途中で活動が落ち込んだものの現在まで脈々と研究開発が行われてきた。図1に現在までに開発された自動運転車開発の歴史を示す。
法令上の問題や技術レベルの面より残念ながら実用化までには至らなかったが,交通事故や環境負荷の低減に対する自動運転への期待から,近年急速に産学官連携のもと実用化に向けた取り組みが活発化している。
欧州では自動運転車の開発を重要テーマとして位置付け,国家プロジェクトとして取り組んでおり,実用化に向け着実な成果をあげている。また米国においてはグーグルが自動運転車の実用化に向け開発を行っており,公道での自動運転実験を通じ,ネバダ州で成立した自動運転車免許に関する新制度での免許を取得した。
一方,わが国においては2008年から2012年にかけ,安全で環境にやさしい次世代の物流輸送システムの実現を目指した大型トラックの隊列自動走行技術が開発されるとともに,2014年度より政府が中心となり自動運転車の実用化を目指した取り組み(SIP-adus)が開始されている。本稿では近年行われた自動運転の技術開発を紹介するとともに実用化に向けた動きについても触れる。

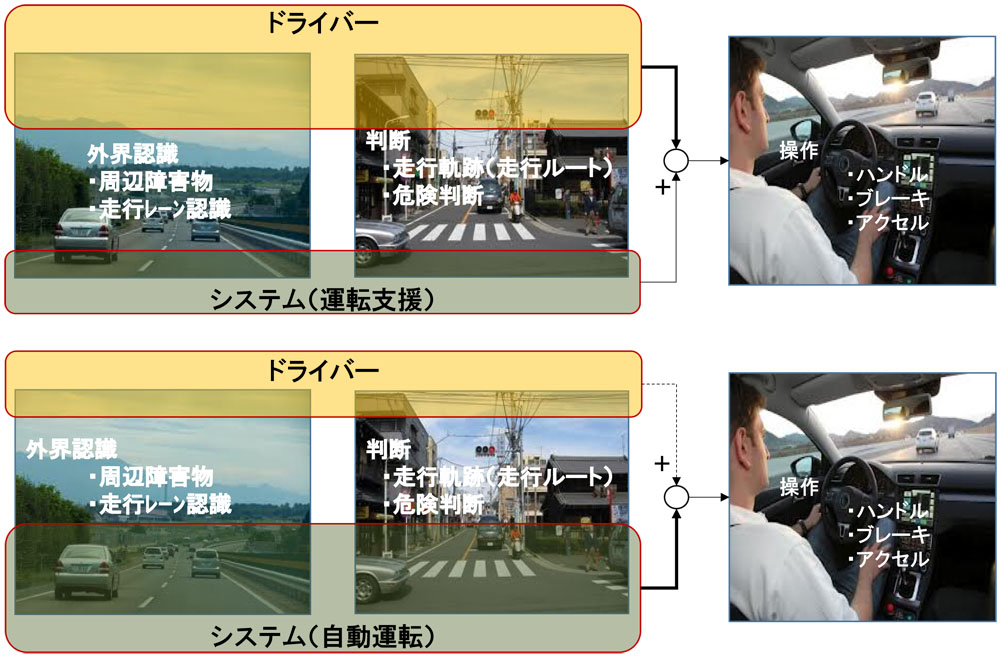
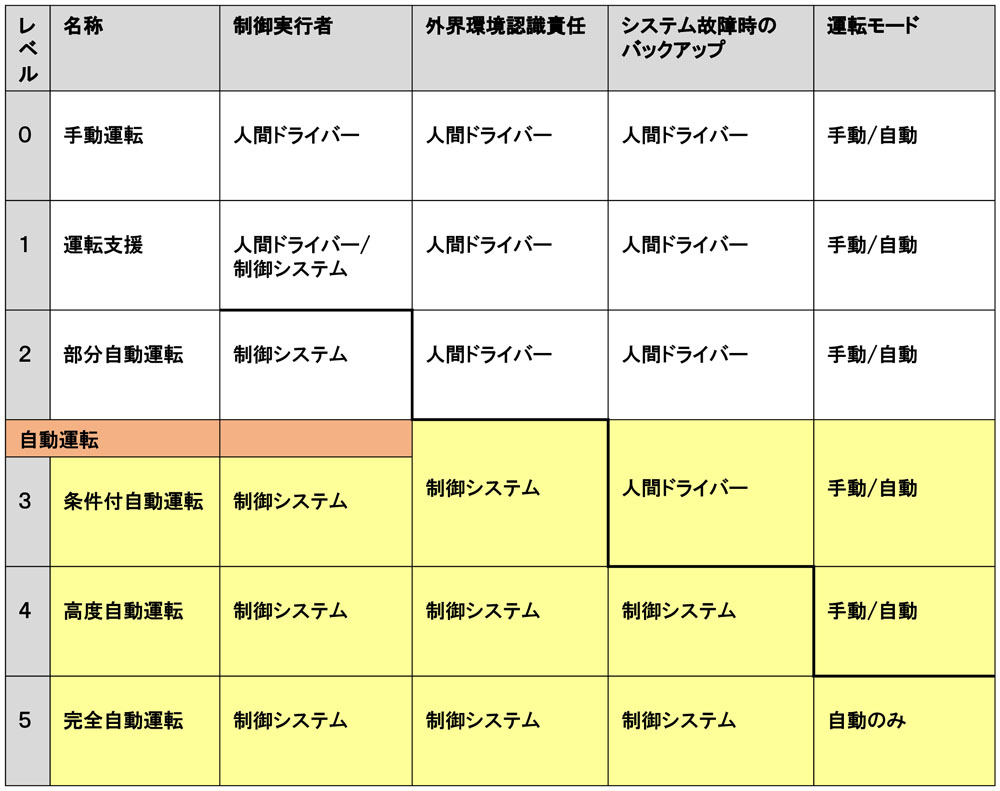
自動車における自動化技術として,ドライバーの漫然運転や居眠り運転等により事故の危険が迫ったとき,制御システムがドライバーの運転操作に介入し,ドライバーの安全運転を支援する安全運転支援システムがすでに実用化され広く普及している。自動運転はこの安全運転支援システムを高度化したものである。運転支援システムとの違いは走行環境認識および危険判断をシステムが中心となって行うもので,図2に運転支援システムと自動運転システムの違いを示す。現在,運転支援システムや自動運転を含め,自動車における自動化レベルの定義が国際的に進められており,自動化レベル定義の一例として,表1に米国SAE(自動運転標準化委員会)が策定した自動運転レベル定義の要約を示す。
この自動化レベルにおいて,法令面および技術面からみて,自動化レベル2までと自動化レベル3以上では大きく異なり,乗り越えなければならない壁が存在する。具体的には自動化レベル2までは走行環境認識の最終責任がドライバーであるのに対して,レベル3以上では走行環境認識の最終責任は制御システム側にある。
このため,自動化レベル3以上の自動運転を実現するには,現在安全運転支援システムで実用化されているセンシング技術,情報処理技術の性能,知能化および信頼性において大幅な技術革新が求められ,日,米,および欧州においてレベル3以上の自動運転の実現を目指した技術開発が進められている。
表2に筆者らが考える自動運転(レベル3以上)に求められる新たな技術項目を示す。また,前方障害物センシング技術として現在製品化されている運転支援システムと自動運転に求められる目標性能を表3に示す。
運転支援用の前方障害物センシング技術として,現在77GHzミリ波レーダーやレーザーレンジファインダーおよび単眼カメラやステレオカメラが実用化されているが,自動運転システムではセンサーはドライバーの目の代わりをするため,さまざまな自然環境変化に対するロバスト(強靭(きょうじん))性が求められるとともに,単に物体までの距離と方位を検出するだけでなく,物体の形状識別や,移動速度ベクトルの検出も必要になると思われる。このため,自動運転では前方距離センサーとして,高精度な距離計測機能だけでなく,水平方向および垂直方向に対して高い分解能を有する3Dレーザーレンジセンサーが必要と考えられる。
以下に自動運転技術の開発状況を紹介する。


自動運転システムの開発において,技術開発の容易さや自動化に対するニーズの観点より,自動運転隊列走行システムが先行して開発されている。次節に代表的な自動運転隊列走行システムを紹介する。
3.1 エネルギーITSにおける自動隊列走行極めて近接した車間距離での走行により空気抵抗が低減し燃費が向上することはすでに知られているが,ドライバーによる手動運転により,近接した車間距離で走行することは人間の運転能力や安全性を考えて,極めて困難である。大型トラックでの15%の省エネ化を目指して,車間距離4mでの隊列走行を実現するための自動運転隊列走行技術がわが国において開発された。
車間距離4mでの隊列走行を実現するには近接車間距離走行のための精密な車間距離制御のみならず,車線に沿って走行する車線維持制御や周辺を走行する一般車両との衝突を回避するための衝突防止制御等の高度な走行制御が必要になるとともに,制御システムが故障した場合,ドライバーによる運転操作が期待できないため,制御システムには高い信頼性と安全性が求められる。図3に自動隊列走行のコンセプトを示す。

車線維持制御システムは,走行区画白線と前輪タイヤとの間隔が常に一定になるようタイヤ操舵(そうだ)角度を自動制御するもので,図4に車線維持制御システム構成を示す。
区画白線と前輪タイヤとの間隔を正確に検出するとともに太陽光や雨による影響を避けるため,小型カメラが路面に対してほぼ垂直に車両側面に取り付けられている。このカメラ画像により,区画白線がリアルタイムで認識されるとともに,白線と前輪タイヤ間の距離(以下,横偏差)が1~2cmの精度で検出される。検出された横偏差を用いて車両運動モデルに基づいた非線形制御アルゴリズムにより最適な前輪タイヤ角度が算出されるとともに,ステアリングコラムに取り付けられた操舵モーターにより前輪タイヤが操舵される。また曲線部を走行する場合,人間が真下の白線を見ただけでは運転できないのと同様,フィードバック制御だけでは制御系の遅れ要素等のため,走行速度が高くなるにつれ制御性が低下し,最終的には白線を追従できなくなる。この問題を解決するため,道路の曲率に応じてあて舵を行うフィードフォワード制御が同時に行われている。

レーダー等を用いて前方を走行する車両と自車との車間距離を速度に応じた安全な車間距離に保持するACC(Adaptive Cruise Control)はすでに実用化され多くの車両に搭載されているが,前方車両が急ブレーキをかけた場合の安全性はドライバーに任されている。車間距離情報だけの制御では,前方車の減速度の発生開始から車間距離に変化が現れるまでには大きな遅れ時間が発生するとともに自車の減速が発生するまでにも遅れが発生するため,衝突を防止するには長い車間距離が必要となる。
この問題を解決するため,隊列走行では前方車両の速度情報や加速度情報を後続車に通信を用いて伝送し,この前方車情報と車間距離を用いて車間距離制御を行うCACC(Cooperative Adaptive Cruise Control)が開発されている。図5にCACCのシステム構成図を示す。
先頭車の速度や加減速度が20msec(0.02秒)ごとに後続車に送信され,車間距離を一定にするため後続車の速度は常に先頭車と同じ速度になるよう制御されるとともに速度制御誤差により発生する車間距離誤差が車間距離センサーからの情報をもとに補正される。
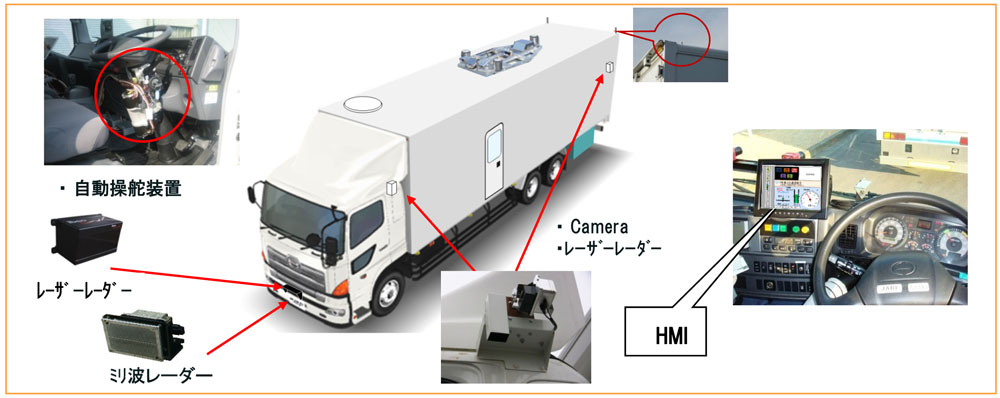
図6に示す自動隊列トラックを用いて,4台隊列走行が行われ,空積状態ではあるが単独走行に比べ,約15%の省エネ効果が確認された。図7に速度80km/h,車間距離4mでの4台隊列走行の実証実験風景を示す。


SARTRE(SAfe Road Train for Environment)はトラックと乗用車混在の隊列走行で特徴は手動運転された先頭の大型トラックを自動運転のトラックや乗用車が数台の隊列で自動追尾するシステムで,追尾車の省エネ化と他の一般車両の割り込みを防止するために隊列内の車間距離は6m程度に制御される。この自動運転隊列システムの特徴は白線を追従するのではなく先行車両と自車との横方向のずれをステレオカメラとレーザーレーダーで認識して自動操舵制御を行うシステムである。図8に使用されているカメラとレーザーレーダーを示す。SARTREにおいて,手動運転される先頭の大型トラックと後続の自動運転車3台による隊列走行実験が実際の高速道路を用いて行われた。図9にSARTREの走行実験風景を示す。


自動運転には表2に示したように新しい技術が求められ,近年これらの技術開発が精力的に進められている。
以下に主要な要素技術の開発状況を紹介する。
4.1 走行制御ECUのフェイルセーフ技術自動運転レベル3以上のシステムでは制御システムが故障した場合,ドライバーによる即時の運転操作が期待できないため極めて信頼性の高いシステムを構築する必要がある。現在,自動運転車についての国際的な安全性・信頼性基準は定められていないが,電気・電子機器に関する国際標準規格IEC61508では自動制御機器に対し,故障率が10-8/Hr(1時間当たり1億分の1の割合)以下のSIL4注1)の安全性レベルを自動運転システムに求めている。
自動運転にはSIL4レベルの安全性が求められると考えられ,機器の高信頼化のみならず制御装置の冗長化やフェイルセーフ化が必要になると思われる。
冗長化はシステムに異常が発生した場合,ドライバーが瞬時に走行環境を理解し,通常の運転操作ができるまでの時間を確保するために必要であり,またフェイルセーフ化は制御装置が故障した場合の異常動作を防ぐ機能であるが,フェイルセーフ化は自動運転車の安全性を考えるうえで信頼性以上に重要な課題である。特に車両制御ユニット(以下,車両制御ECU)に使用されるマイクロプロセッサーが故障もしくは暴走した場合のフェイルセーフ化は極めて重要である。この事例として,鉄道の信号保安装置ATC(Automatic Train Control)で実用化されているフェイルセーフコンピューターの設計概念に基づいた車両制御ECUがエネルギーITSの自動隊列走行プロジェクトにおいて開発された。図10に車両制御ECUのフェイルセーフ構成と試作器を示す。
CPUボードはメイン,サブの2系のCPUとメモリー部,比較器およびリレー回路から構成され,CPUで演算されたメイン,サブ2個の演算結果が比較照合器にて比較され,演算結果が不一致の場合,メインCPUの出力と外部制御機器の結線はリレー回路にて自動的に遮断される。これによりCPUが故障やノイズ等により誤動作した場合,異常値が外部制御機器に送出されるのを防止している。

車両周辺に存在する物体の認識性能の向上も自動運転における大きな課題である。
図11に示すような一般道における非常に複雑なシーンにおいて自動運転を行うには交通信号や道路標識,電柱,ガードレール等の構造物と道路および道路上の自動車や歩行者,自転車等を区別するとともに道路上の物体がどの方向に移動しているかを認識することが求められる。
現状画像センサーやミリ波レーダー,レーザーレーダー等のセンサー単独で複雑な環境を認識することは困難なため,これらのセンサーを複数用いて認識性能を向上するセンサーフュージョン技術が開発されているが,これらを完全に区別することは極めて困難である。そこでセンサーによる物体までの距離情報と高度化された道路地図を組み合わせたローカルダイナミックマップと呼ばれる距離センサーと地図のフュージョン技術によりこの問題を解決する技術が開発されている。このローカルダイナミックマップ技術の概念を図12に示す。
GPSからの位置情報より電柱や信号機等の道路構造物情報をもつ周辺の詳細道路地図情報が算出される。同時に車載3次元レンジセンサーより物体までの3次元距離が検出される。
このセンサーからの3D距離データと道路地図をリアルタイムで合成することにより,レンジセンサーで検出された物体が道路構造物か道路上の物体かどうかが正確に区別される。
上記に示すようにローカルダイナミックマップには2次元面における距離データが必要である。レーザー光を用いた既存のレーザーレンジセンサーでは,レーザー光はポリゴンミラーと呼ばれる回転ミラーを用いて水平方向および垂直方向にスキャニングされるが,垂直方向のスキャニング分解能が粗いため,自動運転用レーザーレンジセンサーでは垂直分解能の高い新しいレーザーレンジセンサーが必要となる。


安全運転支援システムはドライバーの安全運転タスクの一部を担うものであるため,個々の制御システム規模は比較的小さいものである。それに対して,自動運転システムはドライバーに代わり全運転タスクのほとんどを担う必要があり,ローカルダイナミックマップや目標走行軌跡生成,環境理解や危険判断等の人工知能機能等,安全運転支援システムには必要のない高度な情報処理機能が求められる。また制御的にも,横方向と縦方向制御が絡み合う非常に複雑なシステムである。したがって,すべての入力情報をもとに1つのソフトウェアで処理する集中制御方式で自動運転システムを構築した場合,システム変更に対する自由度や,システムの安全性・信頼性の検証が非常に複雑になるとともにバグ発生の要因にもなるなどの問題がある。
したがって,自動運転システムを構成する場合,分散型制御方式が好ましいといえる。自動運転は認知機能,判断機能,操作機能で構成されることを考えると,自動運転のシステムアーキテクチャーもこの考えで設計されるのが合理的であり,この考えに基づいて筆者らにより設計された自動運転のシステムアーキテクチャーの事例を図13に示す。
自動運転システムは4つのモジュールとセンシング部,外部通信部で構成されている。地図モジュールは道路地図とローカルダイナミックマップから構成され,GPSおよび障害物情報より,現在の道路線形情報に加え車両周辺の障害物情報や道路空間情報,目標走行軌跡等を出力する。人工知能モジュールはローカルダイナミックマップからの障害物情報をもとに周辺の走行環境理解や危険予知を行う。また,出力モジュールとして縦方向と横方向それぞれ独立した出力モジュールをもち,上位の指示なしに単独で最小限の安全機能をもっており,上位からの指示に基づいて補正されることにより,信頼性や安全性の確保がはかられる構成となっている。

自動運転の実用化には技術面以外にも法令面や社会的受容性,国際標準化等解決すべき課題がさまざま残されている。海外では公道での自動運転実験が広く実施されている。一方わが国では法令面での制約上,公道での実験が限定されており,複雑な走行環境での技術的知見や社会的受容性を得ることが困難な状況にあったが近年自動運転の走行実験が承認されるなど社会環境が大きく変化しつつある。一方,法令面において自動運転の実用化を可能とする動きも活発化している。欧州各国の交通法令の根拠となっている1968年に制定されたウィーン道路交通国際条約において,自動運転を可能とする条文の追加提案がなされ,承認に向けた審議が行われている。
また米国ネバダ州議会やカリフォルニア州議会において,自動運転を可能とする自動運転受け入れ法案が承認されるなど,自動運転の実現に向け大きく動き出しており,2020年までの実用化が期待されている。