抄録
Ⅰ.はじめに
稲の高温登熟障害の発生例は西日本を中心に多く報告されている.高温登熟障害は,登熟期初期に平均気温27℃以上の高温な環境を受けると,収量(玄米1粒重の低下)および玄米外観品質(乳白米など白未熟粒の発生による玄米の白濁化)が低下することが知られている.近年は,田植期の前倒しや早稲品種の普及,都市化による高温,地球温暖化の進行等によって,高温登熟障害の発生地域の拡大が懸念されている.筆者らは埼玉県で水稲栽培を実施しているが,登熟期初期が盛夏と重なるため,玄米の品質低下が問題となっている. そこで,非熟練者でも近接リモートセンシングの実施が可能となってきたUAVを用いた.UAVは空撮以外にも各種センサ機器を搭載し,上空から計測を行うことができるため,さまざまな分野から期待されているツールである.既に水稲モニタリングに利活用されている(濱ほか,2015;田中・近藤,2016).本発表では,水稲の群落表面温度を面的に観測するため,UAVに赤外線サーモグラフィカメラ(以後,熱赤外カメラ)を搭載し,連続観測を行った.その結果,いくつかの知見が得られたので報告する.
Ⅱ.対象地域
埼玉県坂戸市北部の水田を試験サイトとし、水稲の群落表面温度の観測を行った.観測日時は2016年8月6日10時~7日12時にかけて実施した.試験サイトの水稲栽培品種は「コシヒカリ」で8月4日に出穂期を迎え,観測期間中は穂揃期にあたる.
Ⅲ.観測方法
観測に使用したUAVはDJI社のF550とPhantom2の2機と2種類の撮影カメラを用意した.群落表面温度は熱赤外カメラ「Thermo Shot F30(日本アビオニクス社)」を用いて観測した.熱赤外カメラのシャッター機構やペイロードの関係から自律飛行が可能なF550で2時間おき撮影を行った.また,このカメラは160×120ピクセルと画素数が小さいため,UAVとカメラのスペックを考慮した上で,対地高度を100m(空間解像度:約30㎝)に設定した. 一方、NDVIはPhatom2にYubaflex(BIZWORKS社)を搭載して対地高度約50mのマニュアル飛行で撮影を2時間おきに実施した. なお,玄米については,収穫直前の9月11日に圃場内から18地点のサンプルを採取し,玄米重量(g / ㎡)および整粒歩合を求めた.
Ⅳ.結果・考察
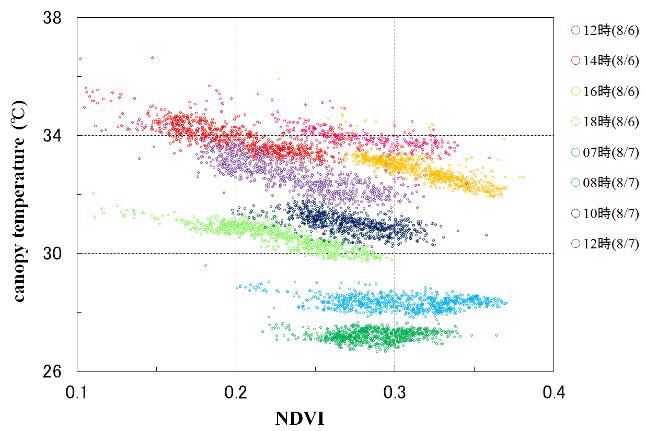
水稲の群落表面温度は一様ではなく,ばらつきをもって分布していることがわかった.また,このばらつきはNDVIと対応しており,相対的に群落表面温度の低温域でNDVIが高くなり,反対に高温域ではNDVIが低い値を示した.また,群落表面温度とNDVIの時間変化について検討した(Fig.1)。その結果,朝方より日中の時間帯で明瞭な相関を示すことが確かめられた.これらの結果から,NDVIが高いほど群落表面温度が低かったのは,蒸散発が盛んであったため,潜熱が奪われるクーラ効果が関係していると考えられる. 穂揃期の群落表面温度と玄米重量には,群落表面温度が高温になると,玄米重量が低下する明瞭な相関を示すことがわかった.