水稲の直播栽培は,水田作経営の規模拡大のための省力化技術として全国で広がりを見せている.直播栽培では種籾を本田に直接播種するため,圃場の均平状態はイネの苗立ちや収量に大きく影響する重要な要素である.しかしながら,均平作業は非常に時間のかかる作業であり,経営規模の拡大のためには更なる省力化が求められている.GNSS レベラーは GPS に代表される衛星測位によって高さ制御を行うレベラーで,一般的に使用されているレーザーレベラーよりも高効率で均平作業ができる.近年の技術革新によって,安価な 1 周波タイプの GNSS 受信機でも水田の均平作業に十分な精度を持つようになった.さらに,GNSS によって得られた位置情報をもとに作成した高低差マップを活用することでも省力化が期待される.また,前作収穫後に均平作業を行う前年整地体系を取り入れることによって春先の労働時間を削減することが可能となり,高低差マップと組み合わせることで,より省力的かつ効率的な均平作業が可能となる.
水稲の低コスト・省力栽培技術の一つとして,種籾を本田に直接播種する直播栽培が全国各地で行われている.その栽培面積は平成 28 年には全水稲作付面積の約 2.2%にあたる約 32,000 ha であり,今後も増加していくことが見込まれる(農林水産省 2018).水稲直播栽培は湛水状態の水田に種籾を播く湛水直播と,入水前の畑状態の圃場に麦用播種機などで種籾を播く乾田直播の 2 つに大別される.どちらの場合であっても,安定した栽培のためには播種前に圃場を均平にしておくことが肝要であり,湛水直播では移植栽培と同様の代かきで均平作業を行うことが一般的である.一方,乾田直播では均平機(レベラー) を取り付けたトラクター(図 1) で均平作業を行う.圃場を均平にすることのメリットは①排水が良好になる,②苗立ちが良好で均一になる,③除草剤の効きが良くなる,④鳥害を防ぐ(粟崎,伊藤 1999) などが挙げられる.しかしながら,均平作業は直播栽培の中でも最も時間を要する作業の一つであり(北海道農政部 2013),更なる規模拡大に向けて省力化が求められる部分である.本稿では,水稲乾田直播圃場の均平作業の省力化について,均平作業の特徴を整理した上で最近の研究事例をいくつか紹介する.

レベラーには直装式と牽引式の 2 タイプがあるが,均平を行う原理は同じである.レベラーにはブレードと呼ばれる圃場表面の土を削って運搬する部品が取り付けられており,このブレードの高さを一定に保ちながら圃場内を走行することで,相対的に高いところの土を削り,相対的に低いところへ土を落としていく.ブレードに保持できる土の量には限界があるため,基本的にはブレードの高さを徐々に下げながら,少しずつ土を運搬して目標とする均平状態に仕上げていく.耕起や播種といった通常の機械作業では,圃場内を斜めに走行したり同じ場所を何度も往復したりすることはほとんどない.そのため,効率的なルート設計が可能であり,走行跡から作業完了地点と未了地点とを目で見て確認できる.しかしながら,均平作業は圃場が平になるまで高いところから低いところへの往復を何度も繰り返すため,走行跡からは作業完了地点を判別できない.また,圃場に残った数cm 程度の微小な凹凸を目視で捉えることは不可能であり,圃場内を一通り走行してブレードが表土を軽くなでるような状態になっていることを確認しなければ作業終了が分からない.
ブレードの高さの制御には,レーザーか GNSS(Global Navigation Satellite System,全球測位衛星システム) が用いられる.レーザーを用いるものをレーザーレベラーと呼び,圃場外の畦などに設置したレーザー発光器から出されたレーザー光を,レベラーの上部に取り付けられた受光センサで感知し,レーザー光の示す基準高との差異を検出する.ここで検出された差異を補正するようにブレードを動かすことで一定の高さを維持する(木村ら 1999).一方で GNSS レベラーは,衛星測位によってレベラーの高さを検出し,常に同じ高さになるようにブレードを制御する.均平作業では非常に高い精度が求められるため,GNSS レベラーは基地局からの無線による補正情報,あるいは VRS(Virtual Reference Station,仮想基準点) 方式を用いた電波による補正情報を受信して,高精度の三次元情報を得る(若杉 2014).これらの補正情報を利用した高精度な測位を RTK(Real Time Kinematic) 測位と呼ぶ.なお,RTK 測位を利用した GNSS レベラーとレーザーレベラーとの整地後の圃場均平度は同等であることが確認されている(農研機構農村工学研究所 2015).
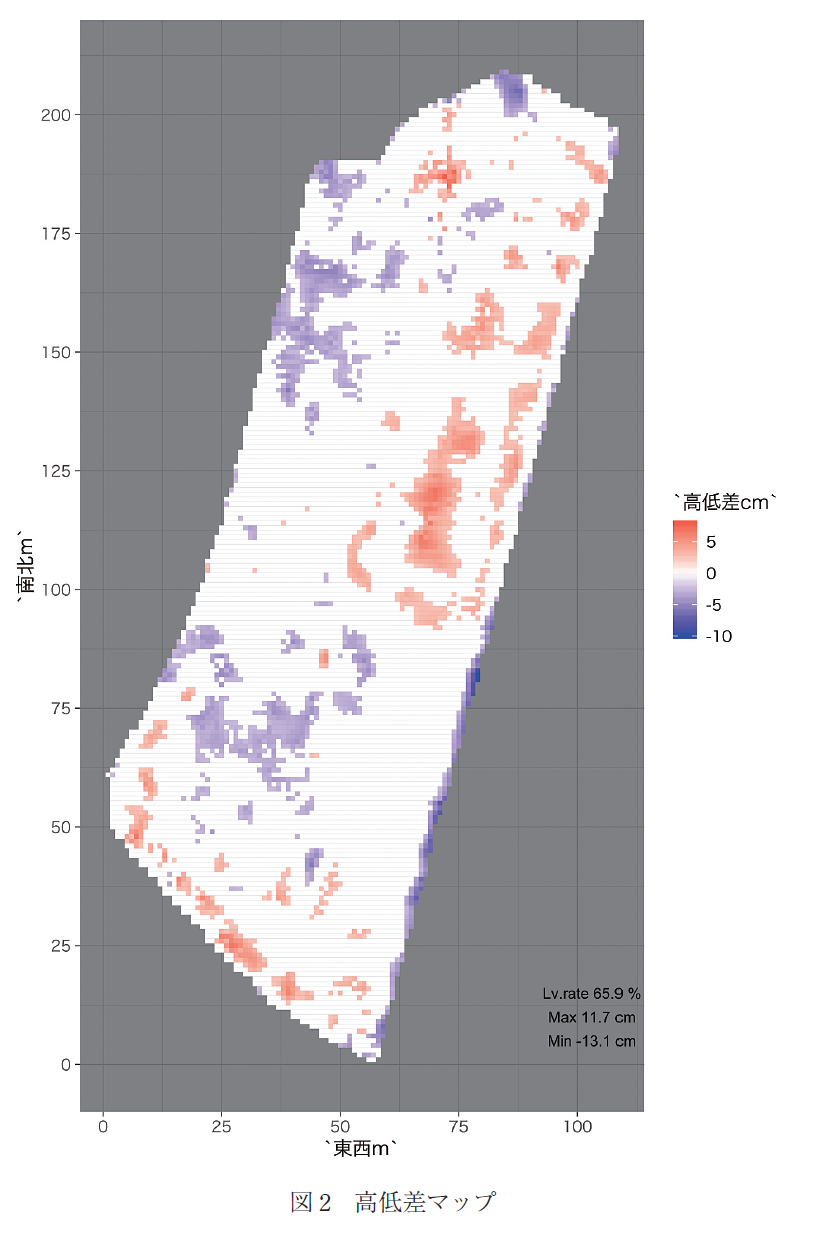
圃場の凹凸を色分けして表したマップを本稿では高低差マップと呼ぶ(図 2).これにより圃場の凹凸を視覚的かつ正確に把握することが可能となり,均平作業の目安にすることができる.こうしたマップの作成は,以前から電子スタッフやトータルステーションを用いた測量で可能であったが,どちらも熟練が必要な方法であり,農業現場で手軽に行えるものではなかった(建石 2007).高精度 GNSS による三次元測位を活用した方法では,GNSS を搭載した車両で圃場内をくまなく走行するだけで凹凸の情報が得られるため,従来法とは異なり,熟練を必要とせず,手間も少ない.その精度は,安価で購入可能な 1 周波タイプであっても水田の均平作業には十分なレベルであり,衛星配置が良い条件下では 1 cm 未満の非常に高い精度で測定できるという報告もある(庄司ら 2008).高低差マップを作成することで圃場の凹凸を把握できるだけでなく,切土・盛土表の作成や運土量の計算なども簡単にできる(若杉ら 2013).長南ら(2019) が高低差マップの効果について複数の現地圃場で調査したところ,高低差マップの提示によって均平作業時間を最大で 4 割ほど短縮できた(表 1).また,非提示の場合には圃場内のくぼみを見逃してしまったのか,作業後の均平度が非常に低い事例も見られた.一方で,高低差マップによって均平状態を確認してから均平作業を行った場合には同様の事例は確認されなかった.このように,高低差マップの利用によって,均平が不十分であるにも関わらず勘違いによって作業を終了させてしまうことの防止も期待できる.今後の農業分野における GNSS の更なる普及に伴い,高低差マップの活用は標準的な技術となっていくことが予想される.

レーザーレベラーは広く普及したレベラーであるが,複数の問題を抱えている.まず,近接した圃場で複数のレーザー発光器を同時に使用するとレーザー光が錯綜し,レベラーが誤作動を起こすことがある.また,発光器から離れると精度が低下することや,発光器の移動・設置に手間がかかることも問題点として挙げられる(若杉ら 2016).前述のとおり GNSS レベラーも補正情報の受信のために基地局を設置する場合があるが,基地局から発せられる補正情報は半径 5 km の範囲で受信できるため,数百m の範囲でしか利用できないレーザーレベラーに比べて移動の手間は少ない.また,GNSS 基地局からの補正情報は受信範囲内にある複数の GNSS レベラーで同時に利用することができるため,錯綜の問題が起きないばかりか,共同で基地局を 1 つ設置すれば地域内で共用できる.実際に国の補助事業等を活用して基地局を整備している地域もある(株式会社クボタ 2018).なお,VRS 方式では携帯電話などを用いて,配信事業者が配信する補正情報をネットワーク経由で受信するため,利用者が基地局を設置する必要はない(Retscher 2002).また,トラクターに PC を積むことでリアルタイムに高低差マップを更新して最新の均平状況を知ることもできる(建石 2007).高低差マップを利用した GNSS レベラーと慣行のレーザーレベラーとの均平作業を比較した研究では,GNSS レベラーの方が施工時間を 32%短縮できたという報告もある(若杉ら 2013).準備時間を含めると約 45%の短縮となっており,高低差マップとGNSS レベラーを組み合わせると,均平作業を高いレベルで効率化できる.
これまでは均平作業そのものに焦点を当ててきたが,ここでは均平を行う時期に注目して春作業の省力化を達成した技術について,北海道での研究事例を紹介する.
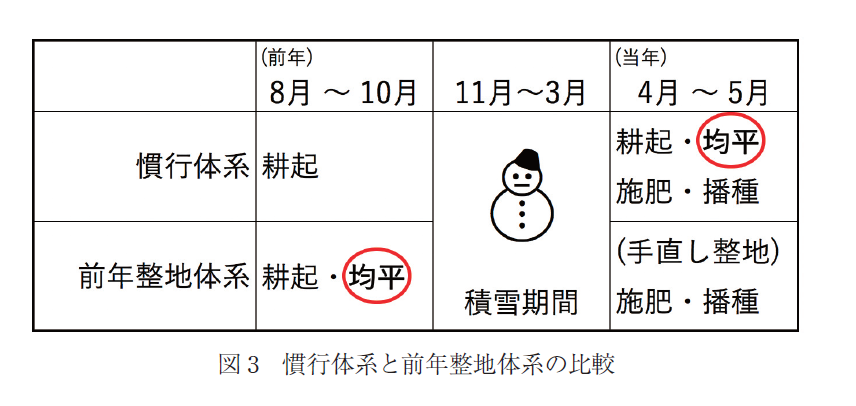
豪雪地帯である北海道では,根雪が溶けて圃場が乾燥するまで機械作業ができない.一方で,その冷涼な気候から水稲の栽培期間も制約されるため本田への播種や移植を遅らせることもできず,結果として,春先の耕起や均平などの圃場準備作業を急ピッチで行わざるを得ない.この春先の労働時間は水田作経営が規模拡大する際のボトルネックとなっている.そこで,均平作業を前年の積雪前に行い,春先の労働時間を減らすのが前年整地体系である.この体系では,前作の収穫後から積雪前にかけての圃場が乾いている期間に均平作業を行う(図 3).圃場の乾燥や作業期間の確保の都合上,北海道で食用米の栽培後に前年整地を行うことは難しいが,麦作後であれば問題なく適用できる.前年整地を行った圃場では整地後に積雪および融雪による影響を受けるため,春に整地を行う慣行と比べて土壌が硬くなる場合や,圃場によっては冬の間に均平が乱れる場合もあるが,いずれの場合も,融雪後に簡単な整地を行うことで支障なく播種作業を行うことが可能で,複数の現地圃場試験の結果から慣行と同等の収量が得られることが確認されている(牛木ら 2012,2014,2016).
いくつかの実践経営では播種時の土壌の状態をより良好なものとするため,春にも簡易な整地を行う前提で前年整地を取り入れている.こうした場合でも,圃場内の大きな凹凸は均されている(図 4) ため,春の整地作業にかかる時間を削減することができる.なお,春先にも均平作業を行う前提で作業時間を試算すると,前年整地体系では春の整地作業時間(耕起と均平) を 3 割弱削減でき,これに高低差マップを組み合わせた場合には 5 割弱削減できる(長南ら 2019).この場合,積雪前と融雪後の合計の作業時間はそれぞれ 4 割弱,1 割強増加するが,春先に比べて前年整地を行う期間の労働時間には比較的余裕があるため大きな問題にはならない.長南ら(2019)の試算では,春季 10 日間のレベラーの負担面積は高低差マップなしで 50%増,高低差マップありで 120%増となり,大幅に広い面積で作業ができる.

本稿では,均平作業そのものの効率化・省力化に貢献する技術として GNSS レベラーと高低差マップを,前年にも均平作業をすることで春先の整地作業時間を削減する技術として前年整地体系を紹介した.最近では GNSS を搭載した農機が各メーカーから市販され始めており,高低差マップは大いに普及が期待される.これらの省力化技術が,これからの水稲直播栽培を支えていくことを期待する.
本稿を書くにあたりご指導いただいた全ての方に厚くお礼を申し上げる.特に,澁谷幸憲氏,林怜史氏,吉田晋一氏にはそれぞれの立場から専門的なご助言および参考文献の紹介をいただいた.この場を借りて感謝申し上げる.