Original Research Papers
Eddy Current Separation of Nonferrous Metals Using a Variable-Frequency Electromagnet

 https://ror.org/03r0ha626
https://ror.org/03r0ha626 2017 Volume 34 Pages 241-247

Details
2017 Volume 34 Pages 241-247
We present a novel technique for sorting nonferrous metal scrap by using eddy current separation. However, rather than vary the magnetic field with a spinning rotary drum, our system utilizes a fixed electromagnet excited by an alternating electric current. The technique requires no moving parts other than a feeding mechanism and has the capacity to operate at excitation frequencies up to 50 kHz and beyond. Sorting results are demonstrated using various combinations of metal spheres, which resulted in nearly perfect performance in terms of grade and recovery. We also demonstrate sorting of aluminum alloys from other aluminum alloys, with consistent grade and recovery between 85–95 %.
Metal recycling is a multibillion dollar industry with tremendous economic opportunities and positive environmental impact. In 2015 alone, global aluminum production from mined ore reached well over 58 million metric tons, selling at an average price of $0.88 per pound (USGS, 2016). Global copper production likewise reached over 18 million tons with an average price of $2.77 per pound. Nearly all of this material eventually ends up in municipal waste streams wherein local scrap recyclers generate significant wealth by collecting and selling the valuable metals. In 2013, for example, 55 % of all aluminum produced in the United States came from recycled scrap (USGS, 2015). Copper, in comparison, was produced from 33 % recycled material. In principle, these values could reach much higher if not for the great difficulty in sorting various materials into more pure streams. Consequently, there is a strong economic pressure to find new ways to efficiently sort municipal waste streams into their basic, elemental components.
To meet this challenge, many industrial machines and processes have been engineered specifically to sort valuable materials from a mixed stream of waste (Gaustad et al., 2012). For example, separation of ferrous metals, such as iron and steel, is readily accomplished through large, permanent magnets mounted into specialized conveyors and collectors (Weiss, 1985). This typically leaves behind a stream of nonferrous metals like copper, aluminum and brass, mixed with other nonmetallic fluff like rubber, textiles, and plastic. Recovery of nonferrous metals then typically occurs through the use of standard eddy current separators, which consist of a spinning drum of permanent magnets placed under a moving conveyor belt (Schloemann, 1975; Lungu and Rem, 2003; Lungu, 2005). As metallic particles pass over the magnets, electrical eddy currents are induced by the alternating magnetic field, which in turn produces a net magnetic force that alters their trajectories.
Once the nonferrous metals have been separated from the fluff, it is desirable to further separate the base metals into purified streams. For example, aluminum and copper are two common metals that might exist in relative mass concentrations of 90 % Al to 10 % Cu. Since copper is a distinctly red metal that contrasts against the gray of aluminum, one common sorting method might utilize computerized optical sorting via basic color recognition (Kutila et al., 2005). Alternatively, one could exploit the fact that copper is nearly three times more dense than aluminum, thereby utilizing the popular technique of dense medium separation (Weiss, 1985). In many developing countries, the cost of human labor is so low that metals are simply sorted directly by hand (Spencer, 2005). All of these methods have various costs, capabilities, and throughputs associated with them, and individual recycling firms must generally weigh the pros and cons within their own economic niche.
In this paper, we will introduce a new method for separating nonferrous metals from other nonferrous metals, including nonferrous alloys. Dubbed electrodynamic sorting (EDX), our system utilizes a time-varying magnetic field generated by an alternating electric current within a fixed electromagnet. The principle was originally pioneered by Saveliev to extract gold particles from rocky ore (Saveliev, 1998) but has since remained relatively unnoticed and unrefined. The process is very similar to traditional eddy current separators mentioned earlier, but without the need for mechanically intense spinning of any heavy, rotary magnets. Another distinct advantage to our approach is the ability to tune the frequency of excitation to as high as 50 kHz and beyond. This allows for much more active recovery of smaller particles in the realm of 1.0 cm and below, which can be especially difficult for rotary-based separators and human separators to work with. Our system also has the distinct advantage of being completely dry, thus avoiding the wet slurry contamination commonly used in many flotation-based separators.
Beginning in Section 2, we discuss the basic physical mechanism of eddy current separation as a derived principle of Maxwell’s equations. Section 3 then follows with a high-level description of the EDX system, including a mechanical diagram and electrical circuit model. Sorting data is then presented in Section 4, wherein metal spheres of various sizes and conductivities are separated by our system. Section 5 finally concludes with a discussion of further applications and research goals for EDX.
Eddy current separation is a highly mature technology with many practical applications in the recycling industry. The basic principle is derived from the fact that when a permanent magnet passes over a conductive metal object, electric charges within the metal tend to experience a net magnetic force (Rem et al., 1997). This causes the charges to flow around in distinct swirling patterns, commonly referred to as eddy currents or Foucault currents. If the magnetic field is strong enough and the relative motion quick enough, this force can significantly accelerate the entire metal particle. Thus, a common design theme with modern eddy current separators is a large, rotary drum implanted with a series of permanent magnets. When the drum is mechanically rotated at a very high velocity, nearby metal particles tend to deflect along distinct kinematic trajectories away from other nonmetallic fluff. A physical barrier is then placed somewhere between the two trajectories, thus separating material into two distinct streams.
For the case of electrodynamic sorting, we completely do away with the spinning permanent magnets, replacing them instead with a single fixed electromagnet excited by an alternating electric current. This significantly changes the mathematical nature of the physics involved as now the relative velocity between the magnet and particle is no longer a significant factor. We may therefore begin with Faraday’s law of electromagnetic induction, which states that a time-varying magnetic field B will give rise to an electric field E in accordance with (Jackson, 1999)
| (1) |
If we next assume sinusoidal steady-state operation at angular frequency ω, all time derivatives can be replaced with ∂/∂t = −jω. The phasor form of Faraday’s law is therefore written as
| (2) |
Now let us consider a metal particle placed somewhere in the magnetic field B. Because of the induced electric field E, electric charges within the metal are accelerated accordingly, thus giving rise to an eddy current density J. The relation between E and J is then given by the point form of Ohm’s law, written as
| (3) |
where σ is the electrical conductivity of the metal. Changing magnetic fields therefore give rise to electric fields, which in turn give rise to eddy currents in metallic objects.
Next, we note that electrical currents also give rise to magnetic fields of their own in accordance with Ampere’s law,
| (4) |
where Be indicates the magnetic fields produced just by the eddy current density J. This implies more changing magnetic fields that must be accounted for in Eqn. (1), which in turn cause changes in the resultant eddy current J. Thus, a complete solution for J, E, and B requires us to solve Eqns. (1)–(4) simultaneously. While such a process extends well beyond the scope of this article, we can at least note that once a solution for J is finally obtained, it becomes possible to calculate the net Lorentz force F acting on the metal particle. This is given by the magnetic force law,
| (5) |
where the integral is carried out over the volume defined by the space within the particle. Thus, if the excitation field B is strong enough and the frequency ω great enough, the net force F will be great enough to significantly deflect arbitrarily large particles of metal.
The basic configuration of our EDX system is depicted in Fig. 1. The core of the system is a wire-wound ferrite toroid, excited by an alternating electric current. A specialized gap is then cut out from the toroid and serves as the concentration point of time-varying magnetic fields. As particles enter the gap, eddy currents are induced in accordance with various factors, like conductivity, geometry, B-field variation, and frequency of excitation. In particular, particles with very high conductivity will tend to experience very strong forces, thus pushing them away from their natural kinematic trajectories. Dense particles, however, have greater inertia and will therefore resist being accelerated. Where exactly the particles land will therefore depend on a combination of both factors, which are fortunately varied enough to produce highly distinct trajectories among most materials of interest. Thus, a simple mechanical splitter is all that is required to finally separate materials into their corresponding bins.
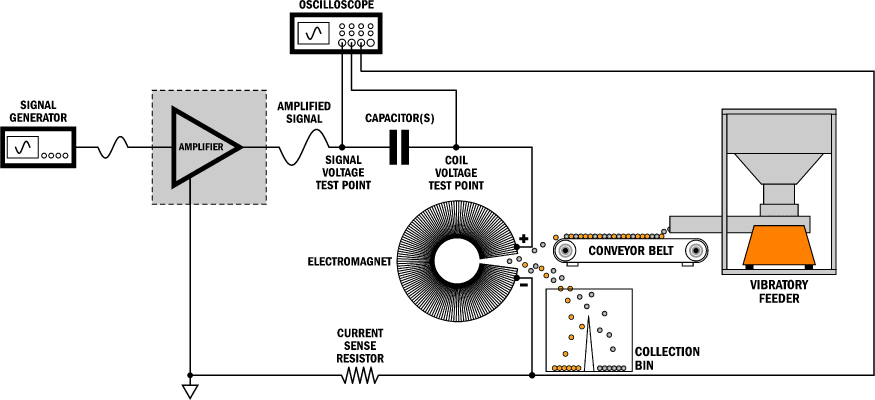
Schematic diagram of the electrodynamic sorting system.
Fig. 2 shows an electrical circuit diagram for the EDX drive electronics. A small-signal voltage Vs is produced by a standard signal generator, which determines the frequency and amplitude of the excitation signal. This signal is then fed to the high-power amplifier U1, which is needed in order to drive the core with enough current to saturate the magnet. For this particular system, we used the AE Techron model 7796, which is rated to deliver upwards of 5 kW of continuous power. In practice, however, our system usually only requires about 350 W to operate.
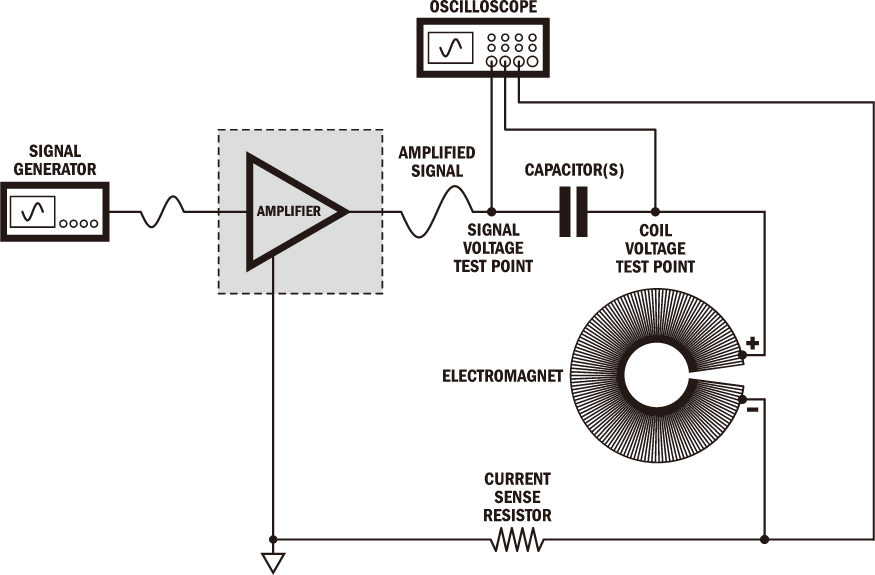
Equivalent circuit model for EDX drive electronics.
At the output of the power amplifier, we employ a series RLC circuit to drive the core. Because the primary electromagnet is comprised of a wire-wound ferrite, it naturally manifests as a lumped inductance L with values typically ranging between 1–10 mH. In series with the inductor is an equivalent resistance R, representing the internal thermal loading of the magnet that occurs during operation. Typical values may reach as high as 20 Ω, but can vary strongly with the size of the magnet, the magnetic material, and the frequency of operation. However, this value is usually dwarfed by the reactive impedance of the inductor, which can easily reach many hundreds of Ohms when excited to several kilohertz. We therefore placed a lumped capacitance C in series with L, thus creating a resonant RLC circuit. When excited at the resonant frequency
Fig. 3 shows an isometric view of the magnetic core itself, which has been shaped into a square toroid. The dimensions are given by an outer radius of 440 mm, inner radius of 240 mm, and height of 30 mm. The gap is a specialized double-cut, which is used to funnel flux into a tight volume of space and serves as the feeding point for small metal particles. At the point of inner radius, the gap separation starts at 10 mm with a flare angle of 10°. The flare then extends radially outward for 30 mm before opening up to a widened flare of 40°.
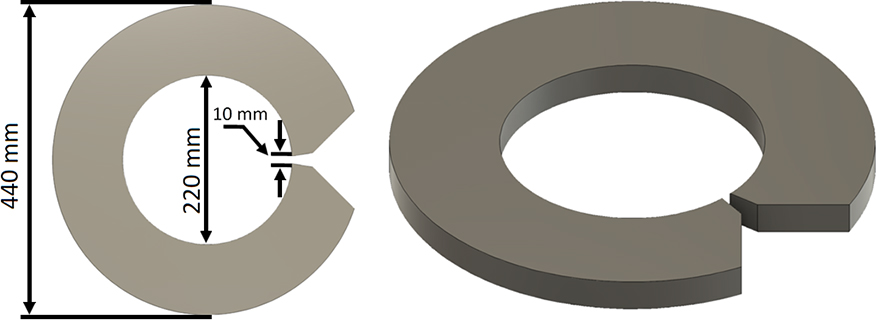
Ferrite core geometry.
Considering that the core must channel strong magnetic fields at high frequency, the specific choice of material is very important. In particular, electrical conductivity must be very low, or else eddy currents induced within the core, itself tend to result in heavy thermal dissipation. It is also important that the material be magnetically soft, meaning that hysteresis effects must be small as well. NiZn ferrite is well-known for satisfying both of these properties (Leary et al., 2012) and was therefore used to construct our EDX magnet.
Finally, the core must be wound with electrical wiring and excited by an alternating current. The exact number of turns in the windings is somewhat arbitrary, though many practical issues must be carefully weighed. In principle, if the drive current I is held constant, then a doubling of the number of turns N will subsequently double the magnetic field intensity B within the gap. However, this also increases the inductance of the coil by a factor of four, thus quadrupling the corresponding voltage at a given frequency. If this voltage gets too large, then the insulation around the wiring itself can potentially break down and halt the system. Likewise, we can reduce the value of N to maintain a reasonable voltage, but only by reducing the current density around the core. This causes B to fall accordingly, which can only be compensated for by increasing I. After careful trial-and-error, we eventually settled on a value of N = 300 turns, which was enough to saturate the magnet at a peak current of roughly I = 4.5 A.
In order to quantify our sorting data, it is first necessary to define the quality metrics for a given sorting process. We begin by considering two initial masses, m0 and M0, of differing materials mixed together at the input of the sorter. At the output are two bins, labeled bin A and bin B. The goal of the sort process is for all of mass m0 to collect in bin A and for all of mass M0 to collect in bin B, with no errors either way. We therefore define mA as the total mass from material m0 that falls into bin A, with mB as the total mass falling into bin B. Likewise, we can define MA and MB as the total masses from M0 that fall into their respective bins.
Let us now define the recovery of bin A as the fraction of initial material that collects in its proper bin:
| (6) |
Likewise, the recovery of bin B is defined as
| (7) |
Next, we define the grade of bin A as the fraction of total mass in bin A comprised of its target material. This is written as
| (8) |
with the grade of bin B likewise following
| (9) |
Thus, in a perfectly ideal world, both R and G would approach 100 % for each bin.
Fig. 4 shows a photograph of our experimental test bed with the feeder, magnet, and sort bins all visible. The divider is fixed at a distance of 60 cm below the magnet but could be translated horizontally to an optimal position for each sort. To demonstrate the EDX system, we mixed together various batches of metal spheres with contrasting material properties and then sorted them accordingly. In all cases, the number of spheres was at least 100 for each material being sorted.
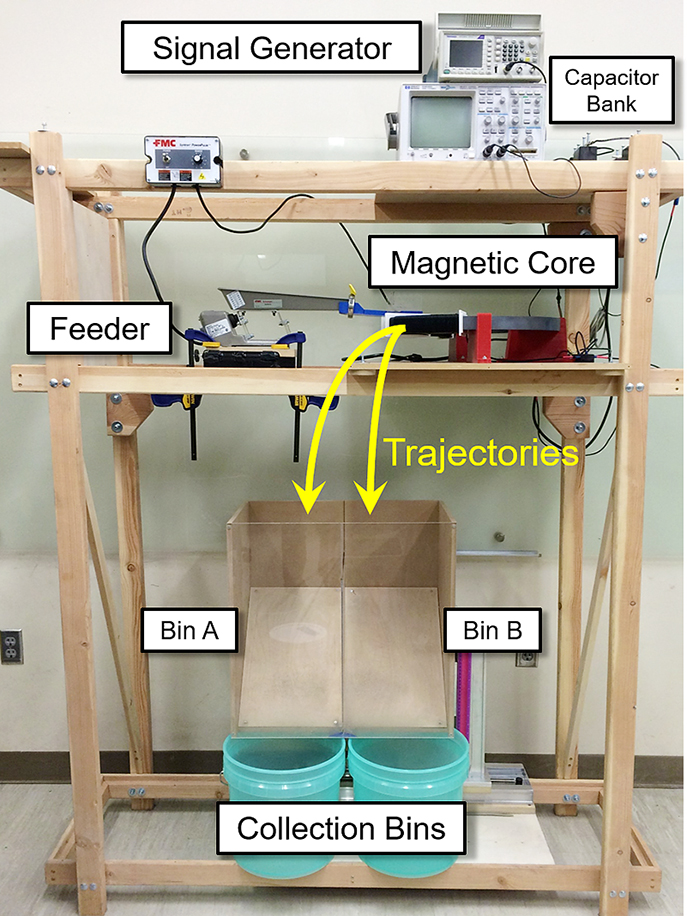
Primary EDX components (power amplifier not shown).
Table 1 lists the materials under consideration for this study as well as their relevant physical properties. In particular, we were interested in two distinct groups of trials. The first case focused solely on the dissimilar metals Al/Cu, Cu/Brass, and Al/Brass, using uniform spheres with 6.0 mm diameter. In this case, the magnet was excited to a frequency of 6.5 kHz and driven to a peak current of 4.5 A. The second case then focused on sorting metal alloys, including Al-1100, Al-6061, and Al-2024. In this case, the sphere diameters were slightly larger at 12.5 mm and the frequency was lowered down to 1.9 kHz.
Electrical conductivity and mass density for various metals and alloys under consideration
| Material | Conductivity [MS/m] | Density [g/cm3] |
|---|---|---|
| Copper | 58.5 | 9.0 |
| Brass | 15.9 | 8.5 |
| Al-1100 | 34.4 | 2.7 |
| Al-6061 | 24.6 | 2.7 |
| Al-2024 | 17.3 | 2.8 |
Table 2 shows a summary of our sorting trials. For the case of dissimilar metals, the disparity in trajectories was somewhat dramatic and highly consistent. For example, upon reaching the separator, the disparity between aluminum spheres and copper spheres was well over 6 cm (10 diameters), with random variations of only 1–2 cm. As a consequence, both recovery and grade were consistently 100 % over multiple runs. Similar results were also manifest with Cu/Brass and Al/Brass, likewise giving perfect outcomes. Figs. 5a and 5b show samples of typical sorting results both before and after the sort.
Grade and recovery results under various sorting conditions
| Materials (A/B) | RA [%] | RB [%] | GA [%] | GB [%] |
|---|---|---|---|---|
| Al/Cu | 100 | 100 | 100 | 100 |
| Al/Brass | 100 | 100 | 100 | 100 |
| Cu/Brass | 100 | 100 | 100 | 100 |
| Al-1100/Al-2024 | 100 | 100 | 100 | 100 |
| Al-1100/Al-6061 | 99 | 91 | 92 | 99 |
| Al-6061/Al-2024 | 91 | 86 | 87 | 91 |
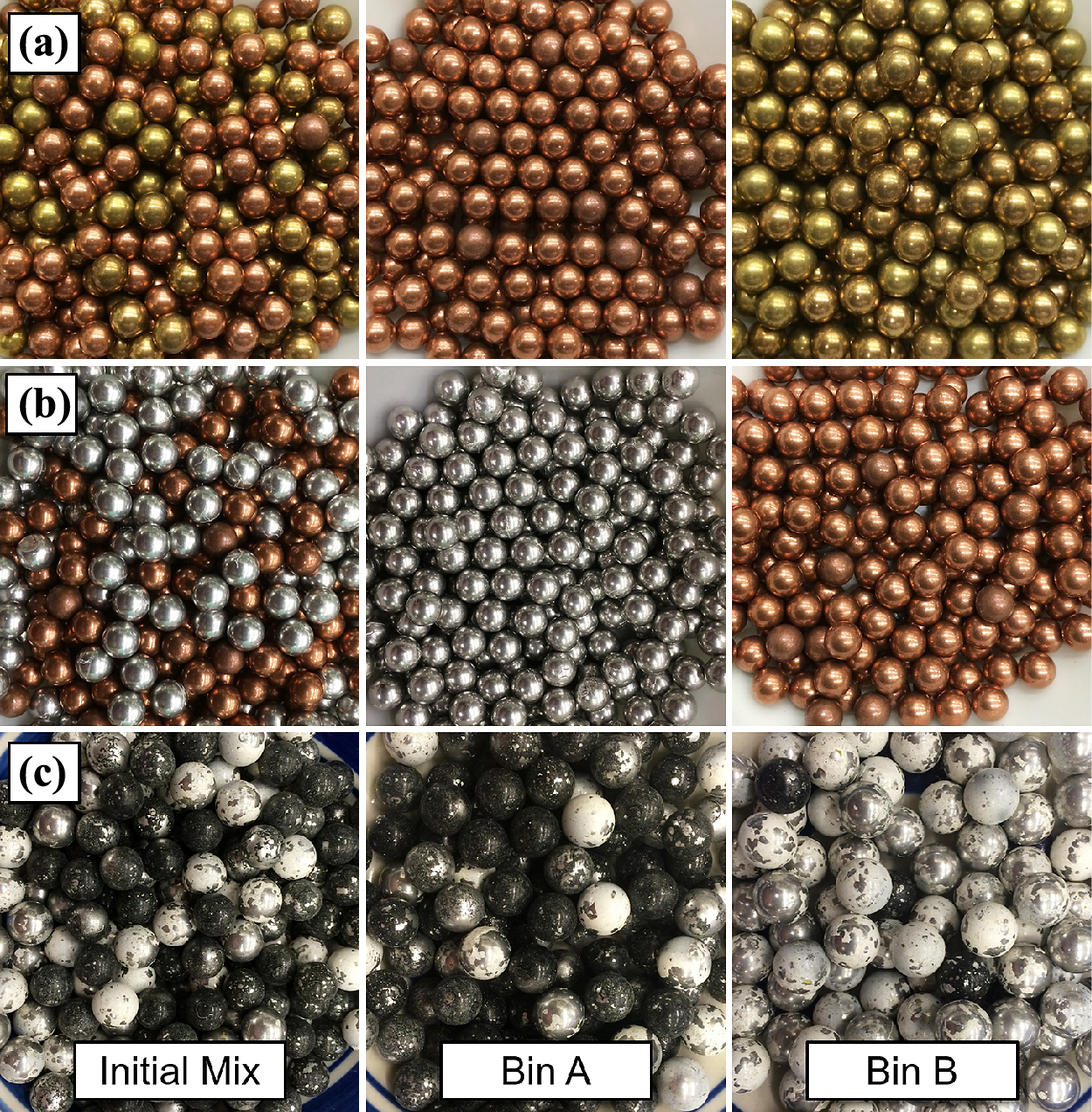
(a) Sorting results between 6.0 mm copper and brass spheres. (b) 6.0 mm aluminum and copper spheres. (c) 12.5 mm aluminium alloys. Al-6061 spheres are painted black with Al-2014 spheres painted white.
Only when we attempted to sort aluminum alloys from other alloys did separation errors begin to emerge. In this case, the mass density of the particles is virtually identical, leaving only small variations in conductivity by which to sort. Thus, the separation distances were typically in the range of only 3–4 cm (3 diameters), with almost as much variance causing errors. Even so, the results were still consistently very good, leading to both grade and recovery of well over 85 %. A typical sorting outcome is further depicted in Fig. 5c, which shows the alloy mixtures before and after the sort.
As the results in Table 2 show, the principle of electrodynamic sorting exhibits a powerful capacity for sorting nonferrous metals from other nonferrous metals. This capacity was also extended to metal alloy separation, being demonstrated with various combinations of aluminum alloys. While we only limited ourselves to particles on the order of 0.5–1.0 cm, the basic principle could easily be redesigned for both larger and smaller geometries. The system utilizes no moving parts other than those needed to physically feed material into the magnet and requires no special chemical treatment or slurry in order to process material.
While such results are initially very impressive, it is important to remember that our particles were perfectly uniform spheres. This provided a tremendous level of consistency that would likely not exist under real-world conditions. It also has the added advantage of being mathematically symmetric, thus lending itself to closed-form analytic solutions to the resulting force equations (Lohofer, 1989). This is invaluable in identifying the primary factors which contribute to particle forces as well as their varying significance when compared to each other. In practice, however, real-world scrap is highly variable in size, geometry, and even composition, and will naturally exhibit much greater variance in trajectories during the sorting process. We are therefore currently in the process of collecting real-world scrap material and testing our system’s performance accordingly. The results of these investigations, as well as the challenges we overcome, will be the subject of future publications.
One particular feature that requires further research is the problem of throughput. In practice, it will be necessary to process many hundreds of kilograms per hour in order to gain any interest from industrial recyclers. However, due to the bottleneck inherent to the magnetic gap, our current system can only process perhaps 50–100 kg per hour when pushed to its limits. Increasing throughput also tends to add greater chaotic variation to the feed process, thereby reducing grade and recovery in the outcome. Further design iterations must therefore increase throughput by at least a factor of 10 while also maintaining reasonable values in both grade and recovery. For example, the use of a conveyor belt will greatly improve consistency when feeding material to the magnet while simultaneously increasing throughput. Such challenges are also currently being investigated by our research team, and the results will likewise be presented in future publications.
This work was funded by the United States Advanced Research Project Agency-Energy (ARPA-E) METALS Program under cooperative agreement grant DE-AR0000411.
magnetic field intensity (T)
Ccapacitance (F)
Eelectric field intensity (V/m)
EDXelectrodynamic sorting
Fforce (N)
f0resonant frequency (Hz)
GAgrade of sort bin A (%)
GBgrade of sort bin B (%)
Ielectric current (A)
jimaginary unit
Jelectric current density (A/m)
Linductance (H)
m0initial mass of material 1 (kg)
M0initial mass of material 2 (kg)
mAmass of material 1 in bin A (kg)
MAmass of material 2 in bin A (kg)
mBmass of material 1 in bin B (kg)
MBmass of material 2 in bin B (kg)
Nwire turn number
Relectrical resistance (Ω)
RArecovery of sort bin A (%)
RBrecovery of sort bin B (%)
RLCresistor, inductor, capacitor
Vvolume (m3)
σelectrical conductivity (S/m)
μ0permeability of free space (H/m)
ωangular frequency (rad/s)
Nakul Dholu
;%0A%09%09%09newWindow.document.open();%0A%09%09%09newWindow.document.write('<img src=%22./Graphics/34_2017012_6.jpg%22>');%0A%09%09%09newWindow.document.close();%0A%09%09)
Nakul Dholu completed his undergraduate degree in Metallurgical Engineering from Gujarat Technological University, Gandhinagar, India, in 2013. He graduated with MS degree in Metallurgical Engineering as well from the University of Utah, USA, in 2016 under the supervision of his Professor Dr. Raj Rajamani. Currently he is working as a Metallurgist-I at the Freeport-McMoRan Inc. in Arizona, USA. His research interests are in the field of light metal scrap recycling techniques and developing energy efficient mineral processing operations.
James Nagel
;%0A%09%09%09newWindow.document.open();%0A%09%09%09newWindow.document.write('<img src=%22./Graphics/34_2017012_7.jpg%22>');%0A%09%09%09newWindow.document.close();%0A%09%09)
Dr. James Nagel completed his undergraduate degree in 2004 and MS degree in 2006, both in Electrical Engineering, from Brigham Young University in Provo, Utah. He then completed his PhD in 2011, also in Electrical Engineering, from the University of Utah in Salt Lake City, Utah and was awarded the Stockham Medal of Excellence for Conspicuously Effective Teaching. He now works as a research associate for the University of Utah, where his research focuses on applied electromagnetics with a specialty in numerical methods.
Dave Cohrs
;%0A%09%09%09newWindow.document.open();%0A%09%09%09newWindow.document.write('<img src=%22./Graphics/34_2017012_8.jpg%22>');%0A%09%09%09newWindow.document.close();%0A%09%09)
Dave studied Environmental Science with emphasis on Analytical Chemistry at University of Maryland, Baltimore County in Maryland. He managed water quality laboratories at public aquariums for 16 years and has consulted for aquariums, zoos, and academia on water chemistry and life support topics. He now works for the University of Utah as a research associate.
Raj K. Rajamani
;%0A%09%09%09newWindow.document.open();%0A%09%09%09newWindow.document.write('<img src=%22./Graphics/34_2017012_9.jpg%22>');%0A%09%09%09newWindow.document.close();%0A%09%09)
Raj Rajamani has been on the faculty of the Metallurgical Engineering Department of the University of Utah, Salt Lake City, Utah, USA since 1980. Currently he holds the position of professor. His research interests include population balance modeling of tumbling mills, computational fluid dynamics of hydrocyclones, discrete element modeling of semi-autogenous grinding mills, eddy current sorting of metallic particles and modeling of high pressure grinding rolls. He received the Antoine M. Gaudin Award, presented by the Society of Mining, Metallurgy and Exploration Engineers Inc. in the year 2009.