近年の窒素肥料に関する問題として,施肥の蓄積による環境への悪影響と国際的な肥料価格高騰がある.対応策として土壌中の窒素状態に応じて施肥量を変える可変施肥がある.この土壌中の窒素量と関係の深い指標として知られる土壌腐植含有量を推定する研究として衛星画像を用いたものがあるが,撮影タイミングの制限や,雲量の影響も受ける.撮影の自由度が高いドローンの可視画像を用いて土壌腐植含量の目安となる表層の炭素量の推定に取り組んだ.可視画像は農研機構内圃場で 2022 年 3 月 15,29 日に撮影した.炭素量は,2022年 3 月 14 日に 1 m メッシュで調査圃場の土壌を採取し NC アナライザーで測定した.画像から炭素量を推定する手法として 3 つの特徴を有するフローを提案した.1.画像上の紐と足跡の明度の閾値を判定し除去.2.1 m メッシュを 2,3,5,10 m メッシュに統合しノイズの影響を評価し最適なメッシュサイズを決定.3.色相空間,土壌含水比と炭素量の関係を線形回帰で算出.以上のフローで,炭素量に対して自由度調整済み決定係数 0.526 の推定式を算出できた.多様な条件の土壌の調査を進めることでさらなる精度を向上し施肥量低減のための技術開発の一助としたい.
近年,農地への過剰施肥などにより窒素循環は大きく様変わりした.食糧生産の増大などの恩恵を受けた一方,地下水汚染など負の影響も増大してきた(田瀬 2014).具体的には,過剰な窒素を作物が吸収しきれずに土の中に残留し,硝酸イオン(NO3-)の形へ変わる.硝酸イオンは水に溶け容易に圃場から流れ出て周辺の環境,ひいては地球の環境にも悪影響を引き起こす.
また,中国の輸出規制に伴い国際的な尿素の価格が前年比 1.4 倍,前々年度比 3.5 倍と急激に増加している(IMF Primary Commodity Prices 2022).そして,この国際的な肥料価格の上昇に伴い農業協同組合連合会( JA 全農)は,2022 年 6~10 月に販売する肥料の価格について,前期(2021 年 11 月~2022 年 5 月)に比べ,輸入尿素で 94%値上げすると発表した(JA 全農 2022).上記の理由から施肥量を低減する技術が求められている.
施肥量を低減する手法として,土壌中の窒素状態に応じて施肥量を変える可変施肥がある.この土壌中の窒素量を知る手法として,土壌腐植含量及び土壌型から植物が利用可能な可給態窒素量が推定可能であることが示された(宮城県農業センター 1992).土壌腐植含量は,表層土壌の写る衛星画像の可視~近赤外域の波長域の反射と高い負の相関関係を持つことが知られており,少数の土壌腐植含量の実測値と衛星画像から,表層の土壌腐植含量の広域評価が可能であることが示された(畠中ら 1989).そして,丹羽ら(2021)は衛星画像(AIRBUS Defence & Space 社の衛星画像(SPOT 6 号))から表層の土壌腐植含量(平均 104 g/kg)を推定し,決定係数 0.71 の推定式を算出した.また,森下,石塚(2021)は,Unmanned Aerial Vehicle(UAV:無人航空機)で撮影したマルチスペクトル画像,熱赤外画像,DSM(Digital Surface Model)画像のピクセル値を用いて,単一圃場の土壌理化学性分析値(粒径組成,全炭素量,全窒素量,pH(H2O),電気伝導度)についてランダムフォレスト回帰モデルを構築した.
しかし,衛星画像の撮影には,雲量や衛星が調査区域の上空に来るまでデータが取得できないなどの制限がある.一方で,UAV は,衛星に比べ撮影の自由度が高いが,森下,石塚(2021)が用いたマルチスペクトル画像,熱赤外画像などを撮影するカメラは,可視光撮影用のカメラと比べ価格が高いという問題もある.
土壌中の窒素量の目安となる土壌腐植であるが,平舘(2007)は,土壌腐植含量の定義は曖昧であり,研究者,時代によって腐植物質のとらえ方は異なると述べている.一方で,杉田ら(2009)は土壌中の全炭素量から算出した腐植含量と,土壌中の可給態窒素量は関連があると述べている.
そこで,本研究では,土壌腐植含量の目安となる表層の炭素量を対象とし,近年発展の著しい UAV と比較的安価な可視光カメラを用いて空撮を行うことで,小規模な畑の表層の炭素量の推定手法を確立すると共に,可変施肥を実施する際の基礎情報の提供を試みた .
1.調査区の概要と調査圃場
本研究は,我が国の畑の約 47 %を占める(農研機構 2021)黒ボク土の一種,淡色黒ボク土壌の茨城県つくば市観音台の農研機構敷地内圃場 (緯度: 36.02416402,経度:140.1046372)で行った.調査圃場の面積は 2.97 a (11 m × 27 m)であり傾斜はほとんどない.圃場には,前年 9 月~12 月末までキャベツを栽培し,残さ持ち出し後,耕起,整地した.
2.調査手法の流れ
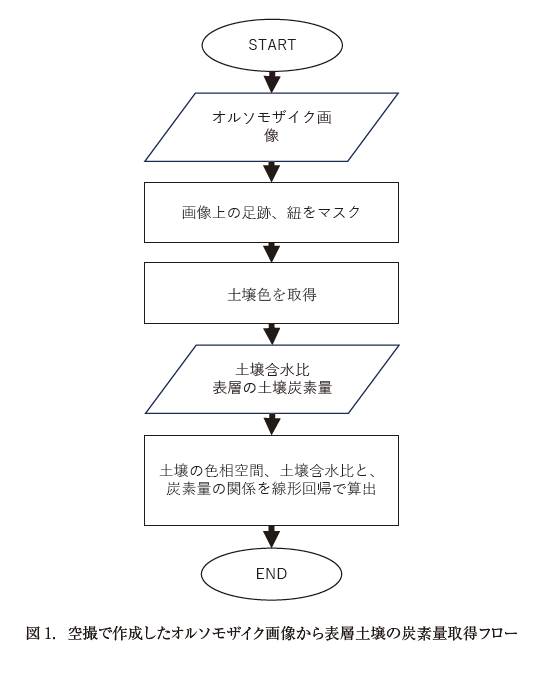
本研究は,以下の流れに沿って可視画像から表層土壌の炭素量推定式を算出した.
1) 土壌腐植含量の目安となる表層の土壌炭素量を取得する.
2) 表層の土壌炭素量推定するデータとして UAV による空撮をし,オルソモザイク画像を作成する.空撮とともに,土色が変化する要素の一つである土壌含水比を取得する.
3) 図 1のフローにそって画像から土壌色を取得し,表層の土壌炭素量,土色,土壌含水比から炭素量の推定式を算出した.
3.表層の土壌炭素量取得
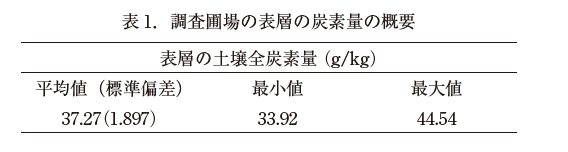
表層土壌の炭素量化学分析として,まず調査区の圃場を 1 m メッシュごと 270 区に区切る.次にメッシュ中央の 20 cm2,深さ 5 cm の土壌を 2022 年 3 月 14 日に採取した.土壌試料は風乾後,2 mm の円孔ふるいを通したものを,NC アナライザー(住友化学,NC-900)を用いてメッシュごとに土壌中の全窒素,全炭素の量を測定した. 調査圃場の表層の土壌炭素量の実測値の平均は,37.27 g/kg,最小値は 33.92 g/kg,最大値は 44.54 g/kgであった(表 1).
4.UAVによる空撮と,オルソモザイク画像作成
UAV は DJI 社の Matrice 300 RTK,カメラは DJI 社の H20T を用いて空撮を行った.高度約 20 m,十分なオーバーラップ率になるようマニュアル飛行(防風林が近くにあり接触の危険性があるため),フォーカス等の撮影条件をすべて自動設定で空撮を行った.空撮は 2022 年 3 月 15 日(以降,空撮 1 回目),3 月 29 日(以降,空撮 2 回目)の 11 時,天気は晴天の日に行った.
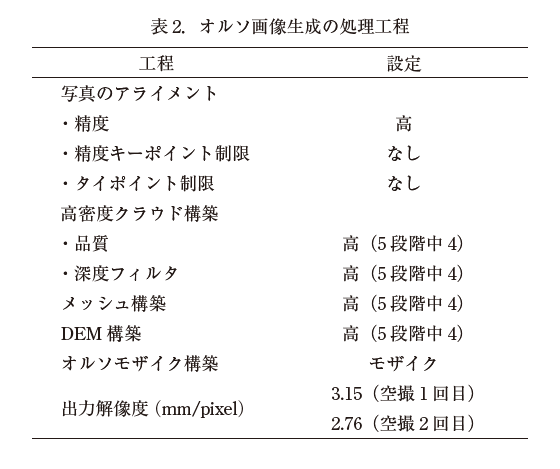
その後,Agrisoft 社の Metashape ver.1.8 を使用し,可視画像からオルソ画像を作成した.各処理工程の設定は表 2 の通りである.また,作成したオルソモザイク画像を図 2に示す.図 2の a,図 2の b に示されるように同じ圃場であっても土壌色が異なっている.この短期間での色の変化としては土壌水分状態の変化によるものが一因である(斎藤ら 1985)と言われている.そこで,土壌の水分状態の変化を知るために空撮時の土壌含水比を測定した.

5.土壌含水比測定
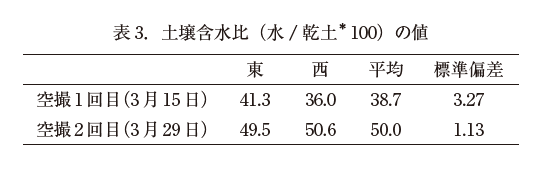
土壌含水比は,ドローンの空撮後,同日中に測定を行った.測定箇所は,防風林の影響により日陰になる時間が長い調査圃場の東側と,防風林の影響の無い西側の両方の端各 5 か所ずつ土壌を採取し計量後,105℃の乾燥機で,24 時間乾燥し,含水比 (土壌水分/ 乾土)を求めた.測定した結果を表 3 に示す.標準偏差が小さいため,調査日の 10 点の平均したものを調査圃場の土壌含水比とした.
6.画像からの土壌色取得
本研究で作成したオルソモザイク画像には,図 3に示すようにメッシュの区切りを示す紐,作業後の足跡というノイズが含まれている.紐は,色が周囲の土壌に比べ明るく,足跡は暗かった.そのためノイズ除去として HSV 色空間の V (明度)を用いることとした.
画像のノイズを除去した後,土壌色を取得した.まず,画像上の紐や,足跡を除くために紐,足跡のマスクが生成される V の値を確認した.次に,V が 25 以下,240 以上に対して黒のマスク画像を作成した.そして,作成したマスク画像と,元画像を合成した.その後,マスクした黒の色を自動で除き土壌採取を行った地点の 35 ピクセル(実測値の土壌採取量 20 cm2 に該当する)の色空間(RGB,HSV)を取得し平均値を算出しそれらを対象区の土色とした.

7.画像から表層の炭素量推定式算出
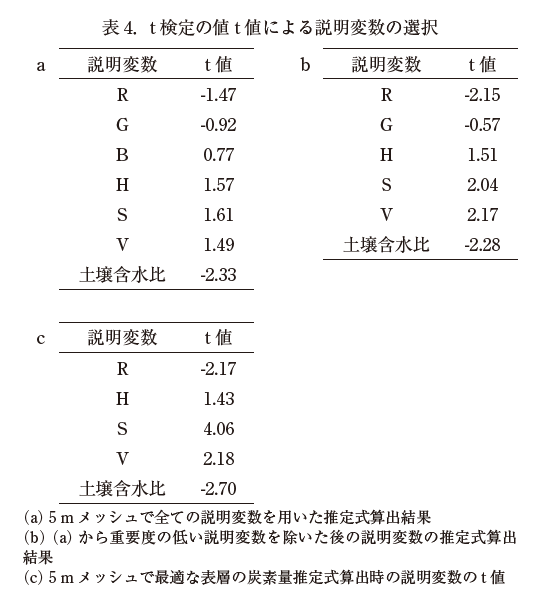
画像から表層の炭素量の推定式を算出するために,メッシュごとのピクセルの色データ(RGB,HSV),土壌含水比を説明変数として,表層の炭素量の実測値を目的変数とした.そして,丹羽ら(2021)の手法を参考にして回帰式の算出を Microsoft 社 Excel ver.2202 のデータタブのデータ分析タブで目的変数,説明変数を選択して行った.説明変数の選択は,ステップワイズ法の一つである変数減増法(backward-forward stepwise)を選択した.全ての説明変数を用いて算出された回帰式に対して t 検定の結果の t 値が 2 未満の説明変数を除いていき,自由度調整済み決定係数(説明変数が増えるほど高くなる決定係数の値を補正したもの)が最大となる回帰式を算出した.説明変数の選択の具体的な流れを表 4 に示す.表 4 の a が,全ての説明変数を用いて表層の炭素量を推定した式算出時の説明変数の有意性を示した t 値の表である.この中で絶対値が最も小さな B が,最も影響が少ない説明変数であり,B を除き,再度表層の炭素を推定する式を算出する.その結果が,表 4 の b である.これを繰り返し,最適な表層の炭素を推定する式を算出した結果が,表 4 の c である.
また,最適な可視画像での表層の土壌炭素量推定式算出のためのメッシュサイズを明らかにした.すなわち,調査区の 1 m メッシュの色,表層の炭素量のデータを統合し 2,3,5,10 m メッシュのデータをそれぞれ作成し,上記処理に沿って表層の土壌炭素量の推定式を算出した.
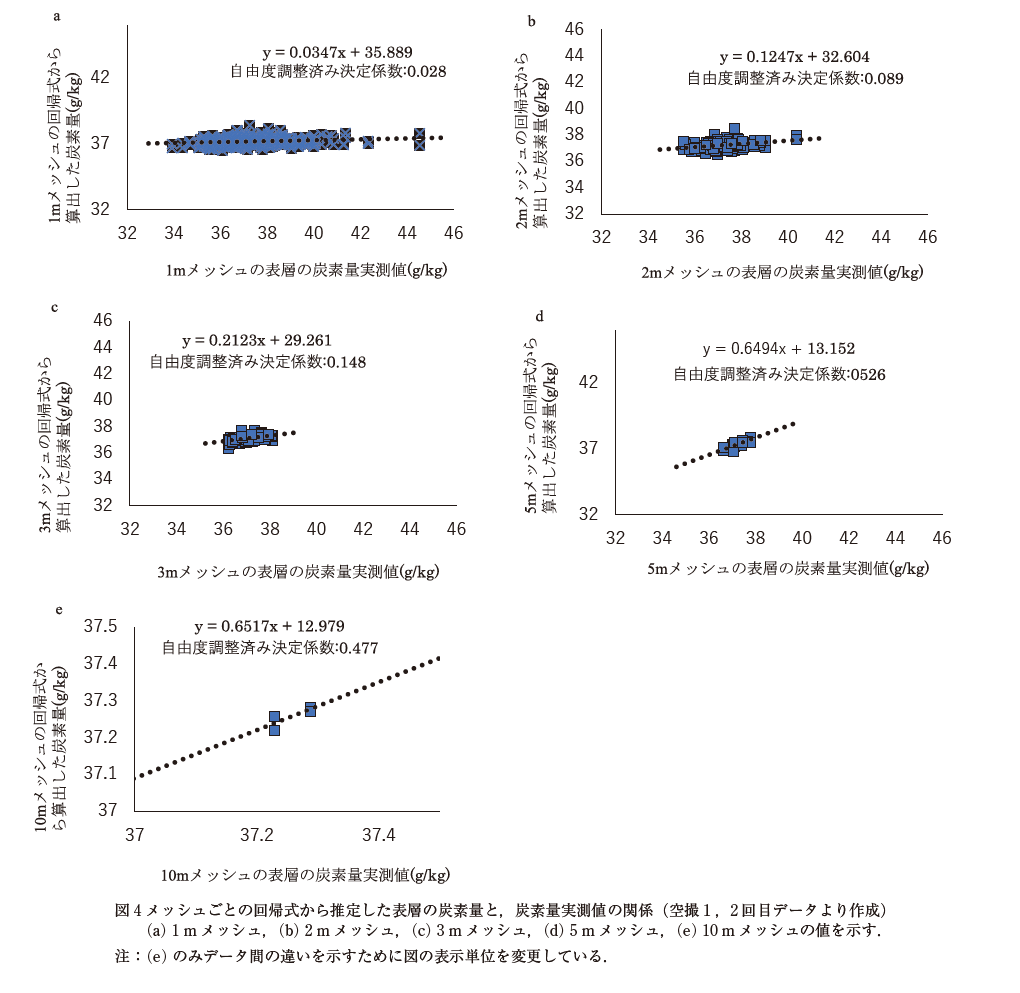
空撮 1,2 回目の画像と 1~3,5,10 m のメッシュごとの土壌色の色空間,土壌含水比と,表層の炭素量の分析結果を表 5,図 4に示す.表 3 に示すように空撮 1 回目の土壌含水比 38.7%と比べ,2 回目の土壌含水比は 50%とより土壌が湿条件であった.最も自由度調整済み決定係数が高いのは 5 mメッシュで,0.526 を示した.これは,図 4に示されたようにメッシュを統合することでノイズデータの影響が緩和され,予測精度が向上したと考察した.また,この 5 m メッシュの線形式は複数制約の P 値(複数の変数が仮説通りにならない確率)が 0.0065 を示し,p < 0.05 であり,本回帰式は統計的に有意であるといえる.

推定式の精度が最も高い 5 mメッシュで,空撮 1,2 回目のそれぞれのデータで算出した推定式を用いて各条件での空撮画像から推定した表層の炭素量の推定値と,実測値の自由度調整済み決定係数,RMSE を表 6 に示す.表 6 に示すように表層の炭素量の推定式算出に用いたのとは異なる日のデータで表層の炭素量を推定すると RMSE が 2.114,7.554 となり実測値と大幅に異なる値を予測した.これは,表 3 に示すように空撮 1,2 回目の土壌含水比が 38.7%,50.0%と異なっており土壌色の変化する要素の一つである土壌水分状態の変化(斎藤ら 1985)の影響が原因であると考察した.
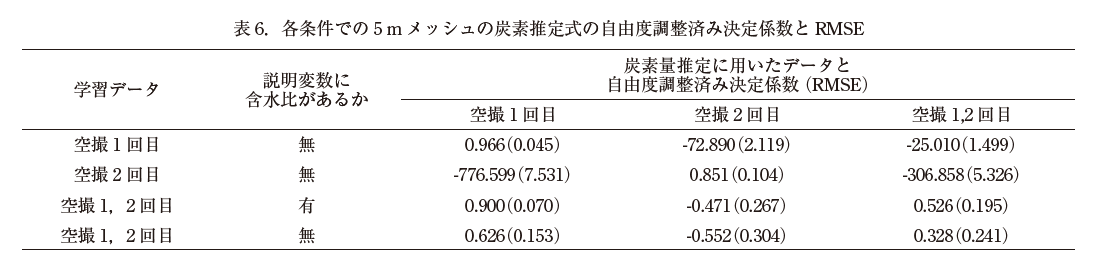
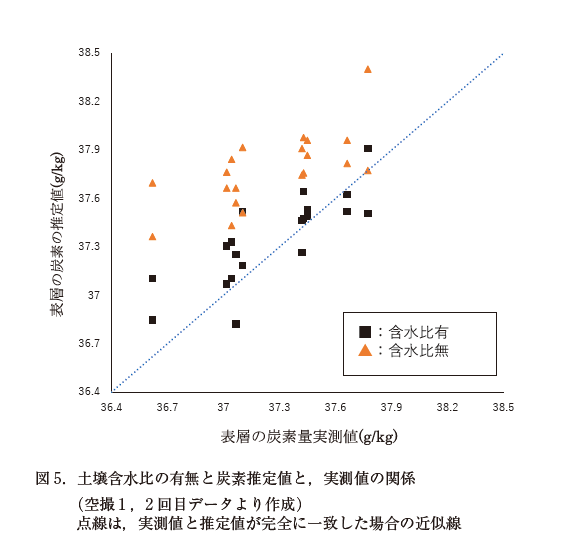
図 5に空撮 1,2 回目のデータで算出した 2 種類の推定式(説明変数に土壌含水比の有無)で推定した表層の炭素量の推定値と,実測値の分布を示す.説明変数に土壌含水比を含まない場合,実測値に比べ絶対値の平均で 0.193 異なっており,RMSE は 0.15~0.3 の値を示した.一方で,土壌含水比を含む推定式で求めた表層の炭素量は,図 5の実測値と推定値が一致した場合の近似曲線に近い値を示した.具体的には,表 6 に示すように全ての条件で RMSE が 0.3 未満であり,説明変数に土壌含水比を含む推定式は,最も予測精度が高いことが示された.また,畠中ら(1989)は腐植含量と,土壌水分がともに可視光に反応するため,土壌水分が少ないほど腐植量の判別精度が向上すると述べている.この土壌水分の影響により空撮 1 回目(土壌含水比:38.7%)の表層土壌の炭素量の推定値の RMSE の精度が,空撮 2 回目(土壌含水比:50.0%)と比べ高くなったことの原因であると考えられる.
最も予測精度が高いことが示された 5 m メッシュの回帰式は,
表層の炭素量 = -11.568 × R(赤) + 0.179 × H(色相) + 0.09 × S(彩度) + 11.6 × V(明度) - 0.145 × 土壌含水比 + 28.45
となった.
以上の結果から説明変数に土壌含水比を含むことで,短期間での土色の変化する要素の一つである土壌水分状態の変化(斎藤ら 1985)を反映し,表層の土壌炭素量の推定精度が向上した結果であると考察した.
ただ,本研究は丹羽ら(2021)の土壌腐植含量のデータ範囲(62~192,圃場数 5)と比べ,表層の炭素量は 33.92~44.54(g/kg),圃場数 1 とデータの多様性が少なく,他の圃場への汎用性については更なるデータの追加と検証が必要である.
本研究では,窒素肥料低減技術の一助となるために UAV の可視画像を用いた表層の炭素量推定フローを提案し,可視画像から土壌中の表層の炭素量を推定する式を算出した.本フローは 3 つの特徴を有しており,1.可視画像上の明度を用いることで紐と足跡をマスクし除いた後,調査対象の土色を取得する.2.1 m メッシュを 2,3,5,10 m メッシュに統合し,ノイズの影響を評価し,最適なメッシュサイズを決定する.3.RGB,HSV の色相空間,撮影時の土壌含水比から,最適な土壌中の全炭素を推定する式を算出する.
本研究で提案した手法に基づいて,UAV の可視画像と,土壌含水比から表層の炭素量を推定した.その結果,本研究の条件下ではあるが 5 m メッシュの画像を用いた表層の土壌炭素量の推定式が,自由度調整済み決定係数が 0.526 と最も高く,複数制約の P 値も 0.0065 を示し有意であることが示された.そして,表 6 に示すように土壌含水比を説明変数に含むことで,土色の変化する要素の一つである土壌水分状態の変化(斎藤ら 1985)を反映したことにより全ての条件で RMSE が 0.3 未満と高い精度を示した.
今後は,可視画像に影響を与える日射を説明変数に加えることや多様な圃場の可視画像と,表層の炭素量のデータ取得を積み重ねることで更なる精度向上に取り組んでいく.
すべての著者は開示すべき利益相反はない.
本研究は官民研究開発投資拡大プログラム(PRISM)の支援を受けて行ったものです.
実験の遂行に際しご指導をいただいた農研機構中日本農研の大野智史氏,土壌分析をしていただいた駒田充生氏,UAV による圃場の空撮をしていただいた農業環境研究部門の石塚直樹氏に感謝いたします.