Abstract
植物高などの高さ情報を無人航空機で取得する方法に,複数の多視点画像から3次元モデルを構築する技術がある.高精度なモデル構築には地上基準点(GCP)を用いた標定か無人航空機による RTK-GNSS 測位が望ましいが,前者は GCP の維持管理やモデル構築前に手作業で補正を行う労力がかかり,後者の機能は国産機体には未実装である.カメラを真下向き(角度-90°)にして撮影した画像から 3 次元モデルを構築すると,出力結果が中央から外周に向かって歪むことが知られているため,GCP の配置とカメラ角度を変えて精度検証点の推定誤差を比較し,少ない GCP で推定誤差が小さい条件を検討した. その結果,カメラ角度が-60°のときは GCP を四隅のみに絞っても鉛直方向の推定誤差が 1.3 cm程度に抑えられ,中心部と周縁部の鉛直方向の推定誤差も小さく,出力結果の歪みが小さかった.一方カメラ角度が-90°のときは,GCP を 17 個に増やしても鉛直方向の推定誤差が 13 cmであった.以上より,数 cm レベルの高さ情報の推定精度と作業効率を両立するためにはカメラに角度をつけ,GCP を四隅のみに絞ればよいことが示された.
緒言
人類の食料需要は 2050 年までに大きな増加が予測されているが,地球の耕地面積には限りがあるため,農業の生産効率を高めることで対応すべく,無人航空機(Unmanned Aerial Vehicle,以後 UAV)によるリモートセンシングを利用した精密農業に関する研究が進められている(Sishodia et al. 2020).農業分野へのUAVの応用研究事例は,機体に搭載した温度カメラによる干ばつ箇所の検出,RGB(Red:Green:Blue)カラーカメラによる湛水箇所の検出,マルチスペクトルカメラによる収量予測やこれらカメラを組み合わせた病害や雑草の検出など,多岐にわたっている(Maes and Steppe 2019).
作物の高さ情報(植物高)は,生育状態やバイオマスの指標として農業上重要な情報である.しかし,植物高は人の手で計測が必要であり取得に時間と労力がかかる.そのため,省力的な植物高計測手法の開発が望まれている.
高さ情報を省力的に取得するための手法として,複数の多視点画像から 3 次元モデルを構築可能な Structure from Motion(SfM)(Ullman 1979, Harwin and Lucieer 2012)や,対象物に照射したレーザーの反射光から距離を測定できる Light Detection and Ranging(LiDAR)を用いた UAV の応用研究が進められている(Wulder et al. 2012).LiDAR は SfM よりも高い精度で牧草の植物高を推定できることを示した報告もあるが(Obanawa et al. 2020), LiDAR は現在も高価なデバイスである.一方,RGB カラーカメラは比較的低価格なデバイスであるため,UAV-SfM は省力的な植物高計測手法として有用であると考えられる.
設計や収差の影響で,UAV に搭載されるものを含む小型レンズの多くは撮影画像に対して中心から外側に向かって複雑な歪みを与えている.このような歪みを持った複数の画像を合成すると,SfM による出力結果が実際の地形に対して上に凸,もしくは下に凸に歪むことが知られ,それぞれ「ドーミング(doming)」,「ディッシング(dishing)」と呼ばれている(Rosnell and Honkavaara 2012, James and Robson 2014, Carbonneau and Dietrich 2017) .これらの歪みはカメラの向きを真下ではなく角度をつけて空撮することによって抑えられることが報告されている(藤原ら 2022, James et al. 2020, 神野ら 2019) .しかし,角度をつけることで対象を 4 方向から撮影する必要があり所要時間が増えるため,省力的なリモートセンシングのために歪みの低減程度を把握する必要がある.
UAV-SfM における問題点として,高精度な位置情報を付与するために緯度,経度,標高情報が明らかである地上基準点(Ground Control Point,以後 GCP)が必要なことが挙げられる.GCP の設置,測位,維持管理には大きな手間を要する.また,SfM 実行の際には,人の手で画像内の GCP の位置にマーカーを設置する必要があり,自動的にマーカーが設置されるソフトウェアの機能を利用した場合でも,マーカー位置の手作業による補正が必要になることが多い.この労力を軽減するため,GCP の数は最小限にすることが望ましい.近年,位置情報の高精度測位を実現する Real-Time Kinematic-Global Navigation Satellite System(RTK-GNSS)が広く利用されるようになっている.RTK-GNSS 高精度位置情報を取得(RTK 測位)した UAV 空撮画像の利用によって,SfM における GCP 利用が省略できると考えられるため,UAV-SfM の効率化が期待されている(中田ら 2020) .そこで,我々の研究グループは,RTK 測位が可能な UAV の水稲圃場における有用性について報告を行った(藤原ら 2022) .しかしながら,2020 年に日本国政府が「政府機関等における無人航空機の調達等に関する方針」を公表し,UAV が取得した情報の漏洩および操縦の乗っ取りといったセキュリティ上の懸念について,十分な対応を取ることを関係省庁と申し合わせた.これにより,2021 年 4 月から公的研究機関では海外製 UAV からセキュリティ上安全とされる国産 UAV へと置き換えが推し進められている.現在,国産 UAV の開発は鋭意進められており,2021 年から ACSL 社の蒼天,SONY 社の Airpeak S1 が販売され始めた.しかし,これらの UAV には RTK 測位の機能が搭載されていない.
これまで,我々の研究グループでは RTK 測位の利用を前提に UAV-SfM に関する研究を進めてきたが,国産 UAV での RTK 測位が可能になる時期は不明である.そのような状況下でも研究成果を社会に還元するためには,RTK 測位ができない際の低コストかつ必要な精度が得られる運用条件を明らかにすることが喫緊の課題であると考えられた.そこで,本研究においては,試験圃場スケールにおける UAV-SfM を行う際に生じる歪みを最小限にする撮影角度および最小限の GCP 配置パターンを明らかにすることを目的とした.
方法
供試材料と空撮
北海道農業研究センター(北海道札幌市)の約 70 m × 7 m の圃場内にて,2021 年 6 月 13 日,14 日に Phantom 4 Pro V2.0(以後, UAV)(DJI JAPAN 株式会社,東京)を用いて空撮を行った.空撮条件は撮影高度 25 m,飛行速度は 9.1 kmg h-1,撮影間隔は2秒,オーバーラップ率 80%,サイドラップ率 60%,カメラ角度は-60°と-90°とした.なお,カメラ角度は水平に向けた状態が 0°,真下に向けた状態が-90°である.撮影ルートはカメラ角度-60°では互いに直交する 4 方向,-90°では直交する 2 方向からとし,いずれの撮影も 3 反復設けた.撮影角度とルート以外の条件は同じであるため,1 反復の撮影に要する時間は-90°では約 4 分,撮影範囲が広がった-60°では約 8 分であった.
圃場内に 25 か所の対空標識を設置し,このうち 8 か所を精度検証点(Check Point,以後 CP)として定め,残りの 17 か所を UAV の GCP の候補とした.GCP の配置を図 1に示す.GCP の配置は,四隅のみを使用(以後,配置 a),四隅と中心を使用(以後,配置 b),中央部の周囲 4 か所と外周の中央 2 か所を使用(以後,配置 c),外周8か所を使用(以後,配置 d),GCP 候補 17 か所すべてを使用(以後,配置 e)の 5 種類および,GCP を用いないパターン(以後,配置 no)を用意した. RTK-GNSS受信機(PENTAX G6J,TI アサヒ株式会社,さいたま市)を用いて各対空標識の緯度,経度,楕円体高を測定した.
SfMソフトウェアによる解析
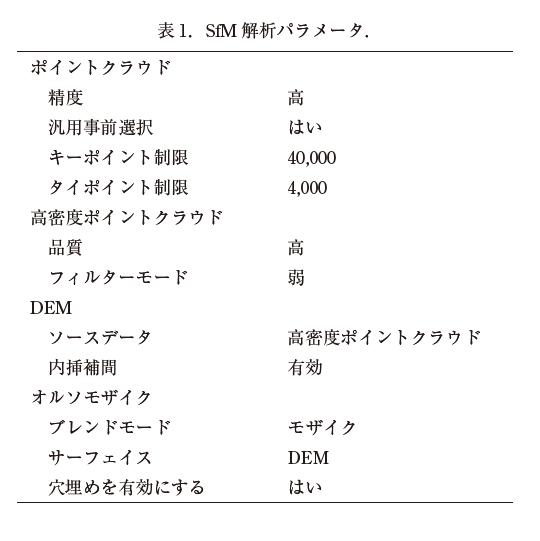
空撮によって得られた画像セットから,SfM ソフトウェアAgisoft Metashape Professional 1.7.1(Agisoft LLC, St. Petersburg)を用いて 3 次元モデル,数値標高モデル(Digital Elevation Model,以後 DEM)およびオルソモザイク画像を構築し,投影座標系 WGS84/UTM zone 54NでDEMとオルソモザイク画像を出力した.パラメータ設定を表 1 に示す.
UAV-SfM精度の検証
DEM から各 CP の緯度,経度,楕円体高を取得するために,Metashape を用いてオルソモザイク画像上の各CPの位置にシェープファイルレイヤを作成した.シェープファイルは,図形の形状と位置情報と各種の属性(図形の名称や楕円体高など任意の情報)を保存する形式として一般的に利用されているファイル形式である.UAV-SfM による CP の位置情報推定結果を得るために、当レイヤの緯度,経度,楕円体高をテキストファイルへ出力した.
CP について,RTK-GNSS 受信機により測定された位置情報と UAV-SfM により推定された位置情報の違いから, UAV-SfM 推定誤差を算出した.水平方向の誤差として,RTK-GNSS 受信機による測定結果と UAV-SfM による推定結果の緯度・経度から 2 点間の水平距離を算出した.鉛直方向の誤差は,UAV-SfM で推定した楕円体高から RTK-GNSS 受信機で測定した楕円体高を引くことで求めた.
撮影条件間の誤差の大きさを比較するため,各反復における CP の位置推定の平均絶対誤差(Mean Absolute Error,以後MAE)を求め,さらに 3 反復での平均値について Tukey 法にて 5%の有意水準で異なるかを調べた.統計解析には R version 4. 1. 0 (R Core Team 2021) を用いた.
結果
カメラ撮影角度,GCP 配置による UAV-SfM 精度への影響
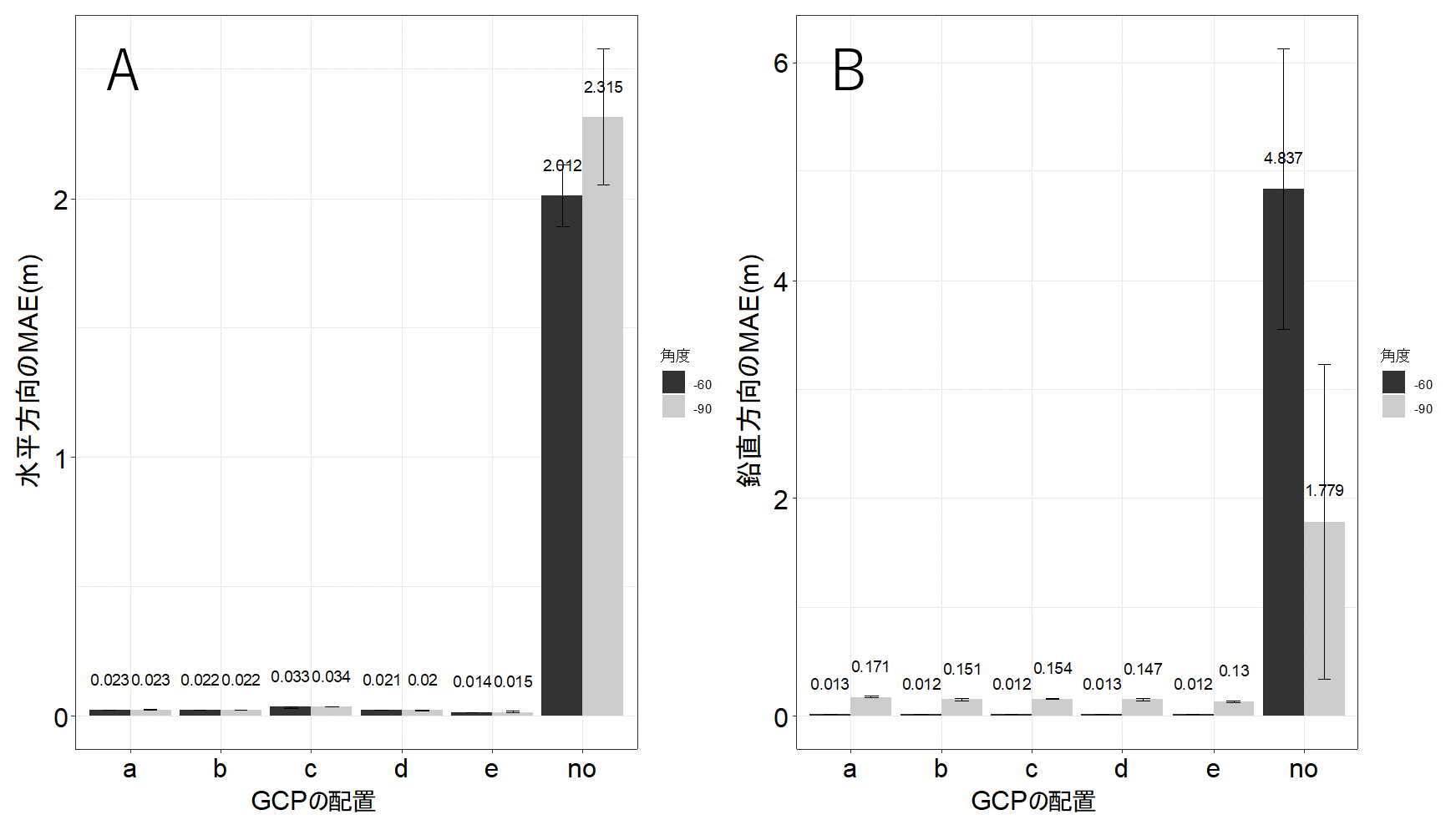
UAV-SfM による各反復における 8 つの CP の位置推定の MAE を求め,さらに 3 反復での平均値を求めた(図 2).配置 no ではカメラ角度に関わらず水平方向・鉛直方向いずれも MAE が 1.7 m 以上あり配置 a~e と比べて明らかに大きかった.配置 a~e に絞って比較すると,鉛直方向の MAE はカメラ角度が-60°の方が-90°よりも小さかった.水平方向の MAE はカメラ角度が-60°のとき,配置 c と e がそれぞれ最大と最小で,他の 3 配置に比べて有意に異なっていた.ただし,その差は 1 cm 程度であった.鉛直方向の MAE はカメラ角度が-60°のときは配置 a~e 間に有意差はなく,いずれも 0.013 m以下であった.
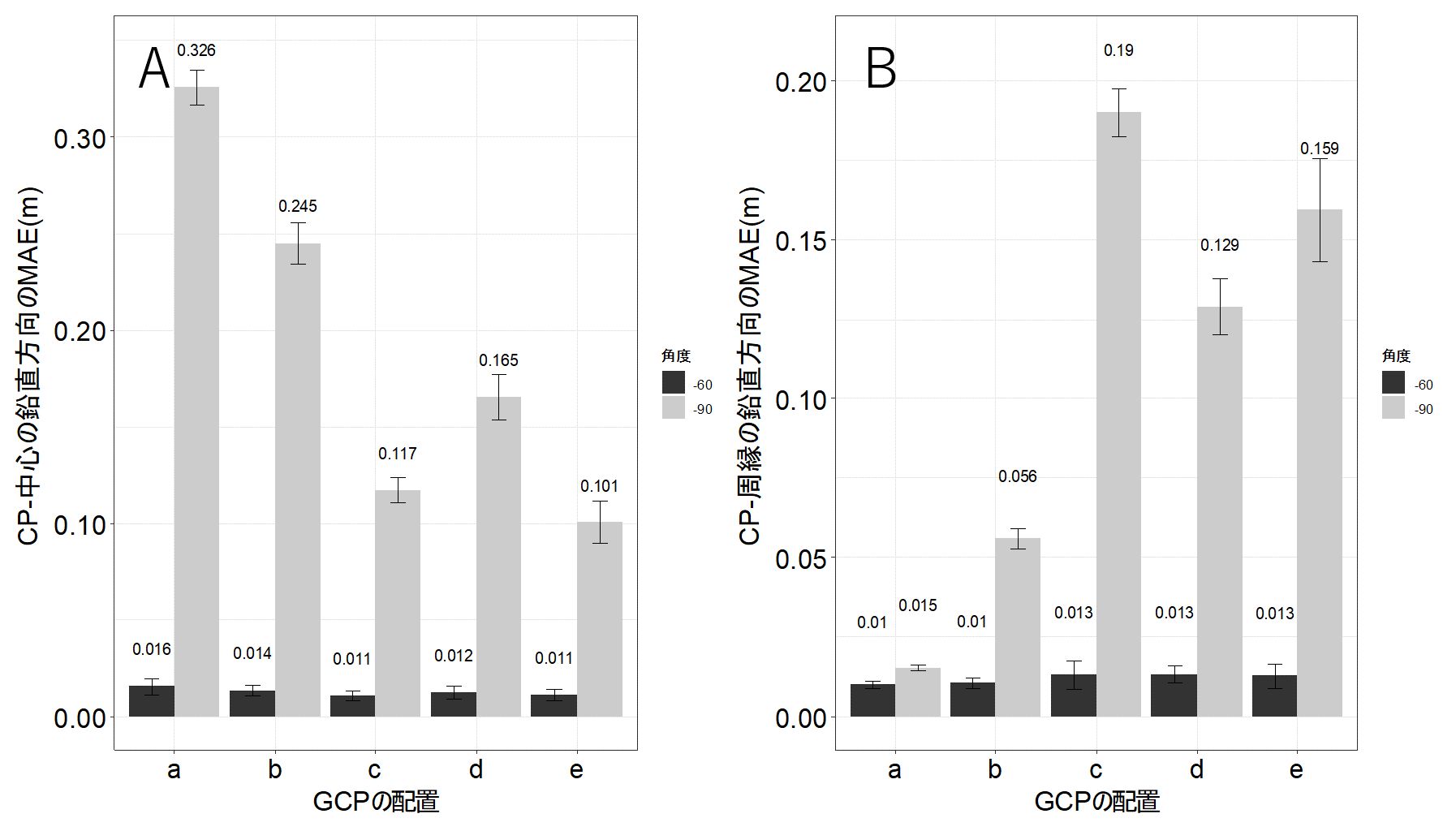
続いて配置 no を除いて,各反復における 8 つの CP を CP-中心 4 つと CP-周縁4つに分けて,それぞれについて鉛直方向の MAE を求め,さらに 3 反復での平均値を求めた(図 3). CP-中心およびCP-周縁のいずれもカメラ角度が-60°のとき-90°よりも鉛直方向の誤差が明らかに小さかった.さらにカメラ角度が-60°のとき,CP-中心と CP-周縁の鉛直方向の MAE は,0.010~0.016 mでありいずれも配置間に有意差はなかった.
CPの鉛直方向の推定がどちら方向にずれているのかを見るために,CP-中心と CP-周縁それぞれについて,鉛直方向の推定誤差を表 2 に示す.カメラ角度が-90°の配置 a~e では MAE が大きいだけでなく,CP-中心と CP-周縁の推定誤差の乖離(絶対差)が大きく,CP-中心の方で推定誤差が負の方向に大きく,中心部が周縁部よりも低く推定されるディッシングが見られた.
考察
GCP による標定を行わない条件(配置 no)ではカメラ角度に関わらず水平・鉛直の両方で誤差が数 m レベルになってしまい,リモートセンシングには適さないことが明らかであった(図 2).以降はこの条件を除いて考察を行う.
カメラ角度が-90°の配置 a~e はいずれもディッシングによる推定モデルの歪みが大きくなり(表 2),場所による推定精度のばらつきが大きくなっていたことを示唆する.また,本研究において,カメラ角度-90°に比べて-60°のとき CP の鉛直方向の MAE が抑えられ,特に配置 a~e では数 cm 単位になった(図 2).これらより,座標を精度良く推定し,植物高推定など cm 単位の精度が必要な場合には,カメラの向きに角度を付けた空撮画像セットを用いるべきと考えられる.
GCPの個数と高さ方向の推定精度の関係は約 70 m × 70 m の圃場では 10 個を超えると推定精度の改善が頭打ちになることや(Xie et al. 2021),0.5 km2規模の研究ではおおむね 20 個 km-2で頭打ちになったという報告があるが(Liu et al. 2022),本研究はカメラ角度が-60°であれば,より小規模な約 70 m × 7 mの試験区内では四隅の 4 個で十分であることを示した.さらに水平方向の MAE は配置 a~e のみの比較ではカメラ角度によらず配置 c で大きかった(図 2A)ことから,GCP の個数のみならず,空撮対象の GCP のうち外周四隅の情報がより重要であることが示唆された.一方,カメラ角度-90°の CP の鉛直方向の MAE は四隅だけで標定した場合(配置 a)に 0.171 m と他の配置より比較的大きくなったが,GCP を 17 個(配置 e)に増やしても 0.13 mであり(図 2),またディッシングも見られるため(表 2),カメラ角度-90°の撮影は GCP の数によらず植物高推定への利用には難しいと考えられる.
本研究では UAV-SfM によって生じる歪みを低減する撮影条件を検討し,試験圃場スケールにおける数 cm レベルの座標推定精度と作業効率を両立する撮影条件(カメラに角度をつける,GCP を四隅に絞る)を示した.本研究で得られた知見は国産 UAV を活用した高精度な高さ情報を省力的に取得する技術の開発に貢献すると考えられ,今後植物高の実測値と推定値との誤差検証が期待される.
謝辞
本研究を実施するにあたり,衛星測位などにご協力いただいた北海道農業研究センターの小花和宏之上級研究員に感謝申し上げます.圃場管理や計測にご助力いただいた北海道農業研究センターの三國孝博氏,加賀見初美氏に感謝申し上げます.
利益相反
すべての著者は開示すべき利益相反はない.
引用文献
- 1) Carbonneau PE and Dietrich JT (2017) Cost-effective non-metric photogrammetry from consumer-grade sUAS: implications for direct georeferencing of structure from motion photogrammetry. Earth Surface Processes and Landforms, 42: 473-486.
- 2) 藤原 崚,保田 浩,齋藤正博,黄川田智洋,松葉修一,杉浦 綾,眞田康治,秋山征夫 (2022) 高精度測位システムを搭載したUnmanned Aerial Vehicle(UAV)によるイネ稈長推定法の検討.育種学研究,24:12-21.
- 3) Harwin S and Lucieer A (2012) Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle (UAV) imagery. Remote Sensing, 4: 1573-1599.
- 4) MR James and Robson S (2014) Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surface Processes and Landforms, 39: 1413-1420.
- 5) James MR, Antoniazza G, Robson S and Lane SN (2020) Mitigating systematic error in topographic models for geomorphic change detection: accuracy, precision and considerations beyond off-nadir imagery. Earth Surface Processes and Landforms, 45: 2251-2271.
- 6) 神野有生,八田滉平,福元和真,田村尚也,宮﨑真弘,米原千絵,浦川貴季,清水隆博,炭田英俊 (2019) UAV写真測量のSfMにおける斜め撮影の効率的配置,標定点の省略可能性,水の影響と対策に関する検討.日本写真測量学会令和元年度年次学術講演会発表論文集:5-8.
- 7) Liu X, Lian X, Yang W, Wang F, Han Y and Zhang Y (2022) Accuracy Assessment of a UAV Direct Georeferencing Method and Impact of the Configuration of Ground Control Points. Drones, 6, 30
- 8) Maes WH and Steppe K (2019) Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends in Plant Science, 24: 152-164.
- 9) 中田康隆,速水将人,輿水健一,竹内史郎,蝦名益仁,佐藤 創 (2020) RTK-UAVを用いた地形変化の観測と応用の可能性:北海道胆振東部地震で発生した森林域の崩壊跡地における検証.景観生態学,25:43-52.
- 10) Obanawa H, Yoshitoshi R, Watanabe N and Sakanoue S (2020) Portable LiDAR-based method for improvement of grass height measurement accuracy: comparison with SfM methods. Sensors, 20: 4809.
- 11) R Core Team (2021) R: A Language and Environment for Statistical Computing. https://www.R-project.org/ (2022年8月12日参照).
- 12) Rosnell T and Honkavaara E (2012) Point cloud generation from aerial image data acquired by a quadrocopter type micro unmanned aerial vehicle and a digital still camera. Sensors, 12: 453-480.
- 13) Sishodia RP, Ray RL and Singh SK (2020) Applications of remote sensing in precision agriculture: A review. Remote Sensing, 12, 3136.
- 14) Ullman S (1979) The interpretation of structure from motion. Proceedings of the Royal Society of London. Series B, Biological Sciences, 203: 405-426.
- 15) Wulder MA, White JC, Nelson RF, Næsset E, Ørka HO, Coops NC, Hilker T, Bater CW and Gobakken T (2012) Lidar sampling for large-area forest characterization: A review. Remote Sensing of Environment, 121: 196-209.
- 16) Xie T, Li J, Yang C, Jiang Z, Chen Y, Guo L and Zhang J (2021) Crop height estimation based on UAV images: Methods, errors, and strategies. Computers and Electronics in Agriculture, 185, 106155.